
Abstract
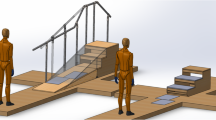
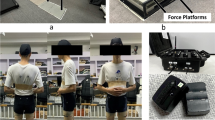
Recognizing and predicting the movement and intention of the wearer in control of an exoskeleton robot is very challenging. It is difficult for exoskeleton robots, which measure and drive human movements, to interact with humans. Therefore, many different types of sensors are needed. When using various sensors, a data design is needed for effective sensing. An electromyographic (EMG) signal can be used to identify intended motion before the actual movement, and the delay time can be shortened via control of the exoskeleton robot. Before using a lower limb exoskeleton to help in walking, the aim of this work is to distinguish the walking environment and gait period using various sensors, including the surface electromyography (sEMG) sensor. For this purpose, a gait experiment was performed on four subjects using the ground reaction force, human-robot interaction force, and position sensors with sEMG sensors. The purpose of this paper is to show progress with the use of sEMG when recognizing walking environments and the gait period with other sensors. For effective data design, we used a combination of sensor types, sEMG sensor locations, and sEMG features. The results obtained using an individual mechanical sensor together with sEMG showed improvement compared to the case of using an individual sensor, and the combination of sEMG and position information showed the best performance in the same number of combinations of three sensors. When four sensor combinations were used, the environment classification accuracy was 96.1%, and the gait period classification accuracy was 97.8%. Vastus medialis (VM) and gastrocnemius (GAS) were the most effective combinations of two muscle types among the five sEMG sensor locations on the legs, and the results were 74.4% in pre-heel contact (preHC) and 71.7% in pre-toe-off (preTO) for environment classification, and 68.0% for gait period classification, when using only the sEMG sensor. The two effective sEMG feature combinations were “mean absolute value (MAV), zero crossings (ZC)” and “MAV, waveform length (WL)”, and the “MAV, ZC” results were 80.0%, 77.1%, and 75.5%. These results suggest that the sEMG signal can be effectively used to control an exoskeleton robot.
Similar content being viewed by others

References
Cifrek M, Medved V, Tonković S, et al., 2009. Surface EMG based muscle fatigue evaluation in biomechanics. Clin Biomech, 24(4):327–340. https://doi.org/10.1016/j.clinbiomech.2009.01.010
Colombo G, Joerg M, Schreier R, et al., 2000. Treadmill training of paraplegic patients using a robotic orthosis. J Rehabil Res Dev, 37(6):693–700.
Dotov DG, Bardy BG, Dalla Bella S, 2016. The role of environmental constraints in walking: effects of steering and sharp turns on gait dynamics. Sci Rep, 6:28374. https://doi.org/10.1038/srep28374
Du L, Zhang F, Liu M, et al., 2012. Toward design of an environment-aware adaptive locomotion-mode-recognition system. IEEE Trans Biomed Eng, 59(10): 2716–2725. https://doi.org/10.1109/TBME.2012.2208641
Esquenazi A, Talaty M, Packel A, et al., 2012. The rewalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am J Phys Med Rehabil, 91(11):911–921. https://doi.org/10.1097/PHM.0b013e318269d9a3
Farrell MT, 2013. Pattern Classification of Terrain during Amputee Walking. PhD Thesis, Massachusetts Institute of Technology, Massachusetts, USA.
Goršič M, Kamnik R, Ambrožič L, et al., 2014. Online phase detection using wearable sensors for walking with a robotic prosthesis. Sensors, 14(2):2776–2794. https://doi.org/10.3390/s140202776
Guizzo E, Goldstein H, 2005. The rise of the body bots [robotic exoskeletons]. IEEE Spectr, 42(10):50–56. https://doi.org/10.1109/MSPEC.2005.1515961
Gupta R, Agarwal R, 2018. Continuous human locomotion identification for lower limb prosthesis control. CSI Trans ICT, 6(1):17–31. https://doi.org/10.1007/s40012-017-0178-4
Huang H, Kuiken TA, Lipschutz RD, 2009. A strategy for identifying locomotion modes using surface electromyography. IEEE Trans Biomed Eng, 56(1):65–73. https://doi.org/10.1109/TBME.2008.2003293
Huang H, Zhang F, Hargrove LJ, et al., 2011. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Trans Biomed Eng, 58(10):2867–2875. https://doi.org/10.1109/TBME.2011.2161671
Jin DW, Yang JK, Zhang RH, et al., 2006. Terrain identification for prosthetic knees based on electromyographic signal features. Tsinghua Sci Technol, 11(1): 74–79. https://doi.org/10.1016/S1007-0214(06)70157-2
Jung JY, Heo W, Yang H, et al., 2015. A neural network-based gait phase classification method using sensors equipped on lower limb exoskeleton robots. Sensors, 15(11): 27738–27759. https://doi.org/10.3390/s151127738
Kawamoto H, Lee S, Kanbe S, et al., 2003. Power assist method for HAL-3 using EMG-based feedback controller. Proc IEEE Int Conf on Systems, Man and Cybernetics, p.1648–1653. https://doi.org/10.1109/ICSMC.2003.1244649
Kim H, Shin YJ, Kim J, 2017a. Kinematic-based locomotion mode recognition for power augmentation exoskeleton. Int J Adv Rob Syst, 14(5):1–14. https://doi.org/10.1177/1729881417730321
Kim H, Shin YJ, Kim J, 2017b. Design and locomotion control of a hydraulic lower extremity exoskeleton for mobility augmentation. Mechatronics, 46:32–45. https://doi.org/10.1016/j.mechatronics.2017.06.009
Kong K, Tomizuka M, 2009. A gait monitoring system based on air pressure sensors embedded in a shoe. IEEE/ASME Trans Mechatron, 14(3):358–370. https://doi.org/10.1109/TMECH.2008.2008803
Lawson BE, Varol HA, Huff A, et al., 2013. Control of stair ascent and descent with a powered transfemoral prosthesis. IEEE Trans Neur Syst Rehabil Eng, 21(3): 466–473. https://doi.org/10.1109/TNSRE.2012.2225640
Lenzi T, de Rossi SMM, Vitiello N, et al., 2012. Intention-based EMG control for powered exoskeletons. IEEE Trans Biomed Eng, 59(8):2180–2190. https://doi.org/10.1109/TBME.2012.2198821
Lenzi T, Carrozza MC, Agrawal SK, 2013. Powered hip exoskeletons can reduce the user’s hip and ankle muscle activations during walking. IEEE Trans Neur Syst Rehabil Eng, 21(6):938–948. https://doi.org/10.1109/TNSRE.2013.2248749
Lewis CL, Ferris DP, 2011. Invariant hip moment pattern while walking with a robotic hip exoskeleton. J Biomech, 44(5):789–793. https://doi.org/10.1016/j.jbiomech.2011.01.030
Long Y, Du ZJ, Wang WD, et al., 2016. PSO-SVM-based online locomotion mode identification for rehabilitation robotic exoskeletons. Sensors, 16(9):1–20. https://doi.org/10.3390/s16091408
Martinez-Hernandez U, Rubio-Solis A, Dehghani-Sanij AA, 2018. Recognition of walking activity and prediction of gait periods with a CNN and first-order MC strategy. 7th IEEE Int Conf on Biomedical Robotics and Biomechatronics, p.897–902. https://doi.org/10.1109/BIOROB.2018.8487220
Neumann DA, 2002. Kinesiology of the Musculoskeletal System: Foundations for Rehabilitation. Mosby, Inc., St. Louis, USA.
Perry J, Davids JR, 1992. Gait analysis: normal and pathological function. J Pediatr Orthop, 12(6):815.
Sankai Y, 2010. HAL: hybrid assistive limb based on cybernics. In: Kaneko M, Nakamura Y (Eds.), Robotics Research. Springer Berlin Heidelberg, p.25–34. https://doi.org/10.1007/978-3-642-14743-2_3
Sanz-Merodio D, Cestari M, Arevalo JC, et al., 2014. Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance. Adv Robot, 28(5): 329–338. https://doi.org/10.1080/01691864.2013.867284
Sasaki D, Noritsugu T, Takaiwa M, 2013. Development of pneumatic lower limb power assist wear driven with wearable air supply system. IEEE/RSJ Int Conf on Intelligent Robots and Systems, p.4440–4445. https://doi.org/10.1109/IROS.2013.6696994
Strausser KA, Kazerooni H, 2011. The development and testing of a human machine interface for a mobile medical exoskeleton. IEEE/RSJ Int Conf on Intelligent Robots and Systems, p.4911–4916. https://doi.org/10.1109/IROS.2011.6095025
Varol HA, Sup F, Goldfarb M, 2010. Multiclass real-time intent recognition of a powered lower limb prosthesis. IEEE Trans Biomed Eng, 57(3):542–551. https://doi.org/10.1109/TBME.2009.2034734
Veneman JF, Kruidhof R, Hekman EEG, et al., 2007. Design and evaluation of the lopes exoskeleton robot for interactive gait rehabilitation. IEEE Trans Neur Syst Rehabil Eng, 15(3):379–386. https://doi.org/10.1109/TNSRE.2007.903919
Walsh CJ, Endo K, Herr H, 2007. A quasi-passive leg exoskeleton for load-carrying augmentation. Int J Hum Robot, 4(3):487–506. https://doi.org/10.1142/S0219843607001126
Yan TF, Cempini M, Oddo CM, et al., 2015. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot Auton Syst, 64:120–136. https://doi.org/10.1016/j.robot.2014.09.032
Young AJ, Ferris DP, 2017. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans Neur Syst Rehabil Eng, 25(2):171–182. https://doi.org/10.1109/TNSRE.2016.2521160
Young AJ, Simon A, Hargrove LJ, 2013. An intent recognition strategy for transfemoral amputee ambulation across different locomotion modes. 35th Annual Int Conf IEEE Engineering in Medicine and Biology Society, p.1587–1590. https://doi.org/10.1109/EMBC.2013.6609818
Young AJ, Kuiken TA, Hargrove LJ, 2014. Analysis of using EMG and mechanical sensors to enhance intent recognition in powered lower limb prostheses. J Neur Eng, 11(5):056021. https://doi.org/10.1088/1741-2560/11/5/056021
Zhang F, Fang Z, Liu M, et al, 2011. Preliminary design of a terrain recognition system. Annual Int Conf IEEE Engineering in Medicine and Biology Society, p.5452–5455. https://doi.org/10.1109/IEMBS.2011.6091391
Zoss AB, Kazerooni H, Chu A, 2006. Biomechanical design of the Berkeley lower extremity exoskeleton (bleex). IEEE/ASME Trans Mechatron, 11(2):128–138. https://doi.org/10.1109/TMECH.2006.871087
Author information
Authors and Affiliations
Corresponding author
Additional information
Project supported by the Agency for Defense Development and Defense Acquisition Program Administration (No. UD160059BD)
Rights and permissions
About this article

Cite this article
Kyeong, S., Shin, W., Yang, M. et al. Recognition of walking environments and gait period by surface electromyography. Frontiers Inf Technol Electronic Eng 20, 342–352 (2019). https://doi.org/10.1631/FITEE.1800601
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/FITEE.1800601