
Abstract
Principles of moving mass control of the orbital parameters of an artificial dumbbell shaped satellite are discussed in the present paper. The rationale is to implement a non-jet principle of actuation by varying the geometry of the satellite through its internal degrees-of-freedom. This can be achieved by spinning the massive parts of the dumbbell and changing their relative distance upon the orbital angle according to the suggested control strategies. The control schemes aim at maintaining a desired satellite size and orientation with respect to the orbital radius in order to take advantage of the variations in the gravitational field along the elliptical orbit. The results demonstrate that the total orbital energy can follow a prescribed temporal profile by controlling the satellite orientation on the orbit to accurately track its desired target. Analytical estimates for the satellite’s energy versus the number of orbital cycles are determined from closed-form solutions. Results from both analytical estimates and numerical integration are in sufficient agreement.










Similar content being viewed by others
References
Beletsky, V.V., Levin, E.M.: Dynamics of space tether systems. Advances in the Astronaut. Sci. 83, AAS Publication (1993)
Baoyin, H., Yu, Y., Li, J.: Orbital maneuver for a rotating tethered system via tidal forces. J. Spacecr. Rocket. 50(5), 1060–1068 (2013)
Celletti, A., Sidorenko, V.: Some properties of the dumbbell satellite attitude dynamics. Celest. Mech. Dyn. Astron. 101, 105–126 (2008). https://doi.org/10.1007/s10569-008-9122-0
Ko, C.-M., Chen, H.-C.: The rotation of a dumbbell minor planet. Adv. Space Res. 37, 174–177 (2006)
Moran, J.M.: Effects of plane librations on the orbital motion of a dumbbell satellite. ARS J. 31(8), 1089–1096 (1961). https://doi.org/10.2514/8.5724
Schechter, H.B.: Dumbbell librations in elliptic orbits. AIAA J. 2, 1000–1003 (1964)
Brereton, R.C., Modi, V.J.: On the stability of planar librations of a dumb-bell satellite in an elliptic orbit. Aeronaut. J. 70, 1098–1102 (1966)
Kirchgraber, U., Manz, U., Stoffer, D.: Rigorous proof of chaotic behaviour in a dumbbell satellite model. J. Math. Anal. Appl. 251, 897–911 (2000)
Sanyal, A., Shen, J., McClamroch, N.: Dynamics and control of an elastic dumbbell spacecraft in a central gravitational field. In: 42nd IEEE International Conference on Decision and Control (IEEE Cat. o.03CH37475) (2000)
Beletskii, V.V., Pivovarov, M.L.: The effect of the atmosphere on the attitude motion of a dumb-bell-shaped artificial satellite. J. Appl. Math. Mech. 64(5), 691–700 (2000). https://doi.org/10.1016/S0021-8928(00)00097-6
Krupa, M., Steindl, A., Trager, H.: Stability of relative equilibria. Part II: Dumbbell Satellites. Meccanica 35, 353–371 (2001)
Longo, M.J.: Swimming in Newtonian space–time: orbital changes by cyclic changes in body shape. Am. J. Phys. 72(10), 1312 (2004)
Elipe, A., Palacios, M., Pretka-Ziomek, H.: Equilibria of the two-body problem with rigid dumb-bell satellite. Chaos, Solitons Fractals 35, 830–842 (2008)
Combot, T., Maciejewski, A.J., Przybylska, M.: Non-integrability of a model of elastic dumbbell satellite. Nonlinear Dyn. 106, 125–146 (2021). https://doi.org/10.1007/s11071-021-06771-y
Beletsky, V.V., Givertz, M.E.: On the motion of a pulsating dumbbell in the gravitational ÿeld. Kosm. Issled. 6, 304–306 (1968). (in Russian)
Chigirev, A., Volkova, J.: Regions of instability of satellite's vibrations parametrically excited with harmonics of gravity potential, In: Nayfeh, A., Mook, D. (eds.) Seventh Conference on Nonlinear Vibrations, Stability, and Dynamics of Structures, July 26–30 (1998)
Gratus, J., Tucker, R.: An improved method of gravicraft propulsion. Acta Astronaut. 53, 161–172 (2003). https://doi.org/10.1016/S0094-5765(02)00202-3
Kalantzis, S., Modi, V., Pradhan, S., Misra, A.: Dynamics and control of multibody tethered systems. Acta Astronaut. 42, 503–517 (1998)
Kuo, Y.-L.: Dynamics and control of a tethered satellite system based on the SDRE Method. Int. J. Aerospace Eng. 2016, Article ID 3510507 (2016)
Abouelmagd, E.I., Guirao, J.L., Vera, J.A.: Dynamics of a dumbbell satellite under the zonal harmonic effect of an oblate body. Commun. Nonlinear Sci. Numer. Simul. 20(3), 1057–1069 (2015)
Abouelmagd, E.I., Guirao, J.L., Hobiny, A., Alzahrani, F.: Stability of equilibria points for a dumbbell satellite when the central body is oblate spheroid. Discrete Contin. Dyn. Sys. -S. 8(6), 1047 (2015)
Abouelmagd, E.I., Guirao, J.L., Hobiny, A., Alzahrani, F.: Dynamics of a tethered satellite with variable mass. Discrete Contin. Dyn. Syst. -S. 8(6), 1035 (2015)
Beletskii, V.V.: The motion of an Artificial Satellite about the center of mass. Nauka, Moscow (in Russian) (1965)
Wisdom, J., Peale, S.J., Mignard, F.: The chaotic rotation of Hyperion. Icarus 58(2), 137–152 (1984)
Wisdom, J.: Rotational dynamics of irregularly shaped natural satellites. Astron. J. 94(5), 1350–1360 (1987)
Wisdom, J.: Swimming in spacetime: motion by cyclic changes in body shape. Science 299, 1865–1869 (2003)
Binzel, R.P., Green, J.R., Opal, C.B.: Chaotic rotation of Hyperion? Nature (1986). https://doi.org/10.1038/320511a0
Stabb, M., Gray, G.: Chaos in controlled, gravity gradient satellite pitch dynamics via the method of Melnikov—saddle stabilization. AIAA 1994–1671. Dyn. Special. Conf. April (1994) https://doi.org/10.2514/6.1994-1671
Melnikov, V.K.: On the stability of the center for time periodic perturbations. Trans. Moscow Math Math. Soc. 12, 1–57 (1963)
Chicone, C.: Ordinary Differential Equations with Applications, Springer, New York (2006) https://doi.org/10.1007/0-387-35794-7
Thomson, W.T.: Introduction to Space Dynamics. Dover, New York (1986)
Khalil, H. K.: Nonlinear systems. Second Edition. Prentice-Hall. (1996)
Slotine, J.J.E., Li, W.: Applied Nonlinear Control. Prentice-Hall, Englewood Cliffs, New Jersey (1991)
Greenwood, D.T.: Principles of Dynamics. Second Edition. Prentice Hall (1988)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Data availability
Data available by reasonable request.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Appendix A: Details on the governing equations.
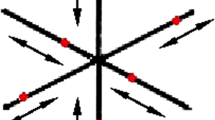
Although the derivations below are quite strightforward, they are reproduecd here due to the presence of internal degrees-of-freedom whose coordinates are varying in a prescribed way and therefore excluded from the set of generalized coordinates. With reference to Fig. 1, the gravitational potential energy and the kinetic energy of the satillate are, respectively,
and
where \(I = mk^{2}\) is a combined moment of inertia of rotating parts about their centers of rotation expressed through the total mass m and the radius of gyration k, \(\Omega = \dot{\nu } + \dot{\theta } + \omega\) is the angular velocity, which is assumed to be the same for both of the spinning parts, and the satellite position vectors are:
The system’s Lagrangian per unit mass is used as
Substituting Eq. (A3) in Eqs. (A1) and (A2), conducting calculations with the Cartesian vectors, and rearranging terms brings Eq. (A4) to the form
This Lagrangian is a function of the generalized coordinates \(\{ r,\nu ,\theta \}\) and velocities \(\{ \dot{r},\dot{\theta }\}\). The additive time dependent term \((\dot{l}^{2} + k^{2} \omega^{2} )/2\) does not include any state variables and thus can be removed from Eq. (A5) with no effect on the corresponding differential equations of motion. Further, taking into account the assumption \(l/r < < 1\) gives
Substituting (A6) in (A5) completes the derivation of Lagrangian in Eq. (2) of Sect. 2. Then Eqs. (3) through (5) follow from Euler–Lagrange equations
It is seen from both Eq. (A5) and its reduced version (2) that the angular coordinate ν is cyclical, and thus the angular momentum conservation law, \(\partial L/\partial \dot{\nu } = const.\), holds as
Appendix B: Equation describing the satellite relative angle
Taking into account the assumption \(k/l < < 1\) brings Eq. (5) to the form
Considering the orbital angle ν as a natural independent variable and thus using the operator of time derivative, \(d/dt\), from Eq. (12) gives
where the quantity h is “frozen” according to Eq. (7).
Multiplying both sides of Eq. (B2) by \(r^{4} /(hl^{2} )\) brings it to the form
Finally, substituting the polar radius, \(r = h^{2} /[GM(1 + e\cos \nu )]\), on the left-hand side of Eq. (B3) gives
The angle φ, describing the relative position of both spinning parts, must depend upon the polar angle ν much faster than the polar radius r in order to generate a sufficient control torque. Therefore, the right-hand side of Eq. (B4) can be estimated as
Substituting (B5) in (B4) gives Eq. (16a) of Sect. 2.2. Note that the above assumption is not restrictive since, according to the control algorithm of Sect. 6, the entire right-hand side of Eq. (B4) is considered as a control input \(Q(\nu )\) (se Eq. (37)). Having obtained the function \(Q(\nu )\), the exact relationship can also be used for determining the dependence \(\varphi = \varphi (\nu )\):
The role of control input, \(Q(\nu )\), is twofold: stabilizing the satellite and changing its orientation on the orbit according to the analytically predicted law. Note that, in case of no spinning, the right-hand side of Eq. (B4) becomes zero, \(Q = 0\), and the system has just one input, \(l = l(\nu )\). This dependence can also be generated by a closed loop controller. The present hybrid approach however assigns the dependence \(l(\nu )\) in an empirical way by selection in order to make the main controller more effective. As a guidence for such a selection, one can assume the distance \(l(\nu )\) to be varying coherently with the orbital radius, for instance, as \(l = l_{0} /(1 + \zeta \cos \nu )\), where \(\zeta\) is a constant parameter, \(|\zeta | < 1\). In this case, calculating the quantity \((dl/d\nu )/l\) and substituting the result in Eq. (B4) with zero right-hand side gives Eq. (16b) of Sect. 3.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pilipchuk, V., Shaw, S.W. & Chalhoub, N. Control of dumbbell satellite orbits using moving mass actuators. Nonlinear Dyn 110, 1373–1391 (2022). https://doi.org/10.1007/s11071-022-07705-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07705-y