
Abstract
In the conic optimization problems, it is well-known that a positive duality gap may occur, and that solving such a problem is numerically difficult or unstable. For such a case, we propose a facial reduction algorithm to find a primal–dual pair of conic optimization problems having the zero duality gap and the optimal value equal to one of the original primal or dual problems. The conic expansion approach is also known as a method to find such a primal–dual pair, and in this paper we clarify the relationship between our facial reduction algorithm and the conic expansion approach. Our analysis shows that, although they can be regarded as dual to each other, our facial reduction algorithm has ability to produce a finer sequence of faces of the cone including the feasible region. A simple proof of the convergence of our facial reduction algorithm for the conic optimization is presented. We also observe that our facial reduction algorithm has a practical impact by showing numerical experiments for graph partition problems; our facial reduction algorithm in fact enhances the numerical stability in those problems.


Similar content being viewed by others


References
Pólik, I., Terlaky, T.: Exact duality for optimization over symmetric cones. Advol-report no. 2007/10, Advanced Optimization Laboratory, McMaster University (2007)
Todd, J.M.: Semidefinite optimization. Acta Numer. 10, 515–560 (2001)
Borwein, M.J., Wolkowicz, H.: Facial reduction for a cone-convex programming problem. J. Aust. Math. Soc. 30, 369–380 (1981)
Borwein, M.J., Wolkowicz, H.: Regularizing the abstract convex program. J. Math. Anal. Appl. 83, 495–530 (1981)
Pataki, G.: A simple derivation of a facial reduction algorithm and extended dual systems. Technical report, Columbia University (2000)
Luo, Z.-Q., Sturm, F.J., Zhang, S.: Duality results for conic convex programming. Econometric institute report no. 9719/a, Econometric Institute, Erasmus University Rotterdam (1997)
Sturm, F.J.: Primal–dual interior point approach to semidefinite programming. Ph.D. Thesis, Erasmus University Rotterdam (1997)
Sturm, F.J.: Theory and algorithms of semidefinite programming. In: Frenk, H., Roos, K., Terlaky, T. (eds.) High Performance Optimization, pp. 1–194. Kluwer Academic, Amsterdam (2000)
Ramana, V.M.: An exact duality theory for semidefinite programming and its complexity implications. Math. Program. 77, 129–162 (1997)
Ramana, V.M., Tunçel, L., Wolkowicz, H.: Strong duality for semidefinite programming. SIAM J. Optim. 7(3), 641–662 (1997)
Tunçel, L.: Polyhedral and Semidefinite Programming Methods in Combinatorial Optimization. American Mathematical Society, Providence (2010)
Waki, H., Muramatsu, M.: Facial reduction algorithms for finding sparse SOS representations. Oper. Res. Lett. 38(5), 361–365 (2001)
Waki, H., Muramatsu, M.: An extension of the elimination method for a sparse SOS polynomial. J. Oper. Res. Soc. Jpn. 54(4), 161–190 (2011)
Rockafellar, R.T.: In: Convex Analysis. Princeton Landmarks in Mathematics and Physics (1970)
Pataki, G.: The geometry of semidefinite programming. In: Wolkowicz, H., Saigal, R., Vandenberghe, L. (eds.) Handbook of semidefinite programming, pp. 29–65. Kluwers Academic, Amsterdam (2000)
Pataki, G.: On the connection of facially exposed, and nice cones. Available from arXiv:1202.4043
Kojima, M., Kim, S., Waki, H.: Sparsity in sums of squares of polynomials. Math. Program. 103, 45–62 (2005)
Waki, H., Kim, S., Kojima, M., Muramatsu, M., Sugimoto, H.: Algorithm 883: SparsePOP: a sparse semidefinite programming relaxation of polynomial optimization problems. ACM Trans. Math. Softw. 35(2), 15:1–15:13 (2008)
Waki, H., Nakata, M., Muramatsu, M.: Strange behaviors of interior-point methods for solving semidefinite programming problems in polynomial optimization. Comput. Optim. Appl. (2011). doi:10.1007/s10589-011-9437-8
Sturm, F.J.: Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 11–12, 625–653 (1999)
Fujisawa, K., Fukuda, M., Kobayashi, K., Kojima, M., Nakata, K., Nakata, M., Yamashita, M.: SDPA (SemiDefinite Programming Algorithm) User’s Manual—Version 7.0.5. Department of Mathematical and Computer Sciences B-448 (2008)
Mittelmann, H.D.: An independent benchmarking of sdp and socp solvers. Math. Program. 95, 407–430 (2003)
Fujisawa, K., Fukuda, M., Kojima, M., Nakata, K.: Numerical evaluation of SDPA (Semidefinite Programming Algorithm). In: Frenk, H., Roos, K., Terlaky, T. (eds.) High Performance Optimization, pp. 267–301. Kluwer Academic, Amsterdam (2000)
Lisser, A., Rendl, F.: Graph partitioning using linear and semidefinite programming. Math. Program. 95, 91–101 (2003)
Karisch, E.S., Rendl, F.: Semidefinite programming and Graph Equipartition. In: Pardalos, M.P., Wolkowicz, H. (eds.) Topics in Semidefinite and Interior-Point Methods. Fields Institute Communications, pp. 77–95 (1998)
Wolkowicz, H., Zhao, Q.: Semidefinite programming relaxations for the graph partitioning problem. Discrete Appl. Math. 96–97, 461–479 (1999)
SDPLIB 1.2. http://euler.nmt.edu/~brian/sdplib/sdplib.html
Lasserre, B.J.: Global optimization with polynomials and the problems of moments. SIAM J. Optim. 11, 796–817 (2001)
Parrilo, A.P.: Semidefinite programming relaxations for semi-algebraic problems. Math. Program. 96, 293–320 (2003)
Acknowledgements
We would like to thank the anonymous referees for providing us with many suggestions for improving the presentation of the paper. We would also like to thank Dr. Katsuki Fujisawa for suggesting that our FRA can remove numerical difficulty in the case of SDP relaxation for Graph Equipartition Problems. The first author was supported by a Grant-in-Aid for JSPS Fellow 20003236 and a Grant-in-Aid for Young Scientists (B) 22740056. The second author was partially supported by a Grant-in-Aid for Scientific Research (C) 19560063.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Jonathan Michael Borwein.
Appendix: Details of Example 4.2
Appendix: Details of Example 4.2
We show that our FRA may generate a finer sequence of faces from a given SDP. We give such an example in this appendix. In this example, our FRA does not terminate even if it finds the minimal cone of the given SDP. In fact, solutions of the homogenized dual systems generated in our FRA do not satisfy the criterion for the termination. For this, we need more iterations in our FRA to terminate our FRA.
For simplicity, we apply FRA-SDP instead of our FRA to our problem. In fact, as we have mentioned in Sect. 5.1, FRA-SDP is essentially equivalent to our FRA. Hence, we obtain the same faces as those by our FRA.
Consider the following POP:
Let ℕ be the set of nonnegative integers. For a given nonnegative integer p, we define \(\mathbb{N}^{2}_{p}:=\{\alpha=(\alpha_{1}, \alpha_{2})\in \mathbb{N}^{2} : \alpha_{1}+\alpha_{2}\le p \}\). For \(\alpha\in \mathbb{N}^{2}_{4}\), we set \(E_{\alpha}\in\mathbb{S}^{6}\) and real values b α as follows:

Here E α is the constant matrix indexed by \(\mathbb{N}^{2}_{2}\times \mathbb{N}^{2}_{2}\) and b α is the constant vector indexed by \(\mathbb{N}^{2}_{2}\) for all \(\alpha\in\mathbb{N}^{2}_{4}\). For example, E (2,1) is written as follows:

where blanks in these matrices mean zero. Then the following SDP problem is an SDP relaxation of POP (25) in the sense of [28, 29]:
We apply FRA-SDP into (26). Then from the definition of E α and b α , we need to find a nonzero solution of the following homogenized dual system (9):
Here, W is of the form

Note that because (26) is feasible, we can assume that b T y=y (2,2)=0. In fact, the following matrix \(\tilde{X}\) is feasible in (26):
The first two equalities of (27) mean that

Since the first and the second diagonal elements of W are zero, the positive semidefiniteness of W implies that all elements in the first and second rows and columns must be zero. Then we obtain y (2,0)=y (0,2)=0, and by the same reasoning, we see that the third and fourth rows and columns are also zero. Therefore, W in (27) must have the form

where blanks stand for zero, and y (4,0)≤0 and y (0,4)≤0. Any element of the above form satisfies (27).
If we choose \(\bar{W}^{1}\) as y (4,0)<0 and y (0,4)<0, then \(\bar{W}^{1}\) lies in the relative interior of the homogenized dual system, and then the first face \(\mathcal{F}_{1}\) is calculated by
As we have observed in Sect. 5.1, we can eliminate the unnecessary columns and rows to reduce the size of SDP (26) by restricting the variable to X 1. However, for the moment, we just applied the original FRA to see exactly how it works.
The dual \(\mathcal{F}_{1}^{*}\) is
Then the homogenized dual system obtained by \(\mathcal{F}_{1}\) is as follows:
Any solution W 2 of the homogenized dual system (29) has the form

We can prove that W 2 with y (2,0)<0 and y (0,2)<0 is in the relative interior of the homogenized dual system (29) and that \(W^{2}\not\in\mbox{span}(W^{1})\). Then the second face \(\mathcal{F}_{2}\) is
and it is not difficult to verify that the second face \(\mathcal{F}_{2}\) is the minimal cone for SDP (26) by Lemma 3.3. From Theorem 4.1, \(\mathcal{F}_{1}^{*}\) and \(\mathcal{F}_{2}^{*}\) are equivalent to the cone \(\varGamma_{\mathcal{B}}(\mathcal{K}^{*})\) and \(\varGamma_{\mathcal{B}}^{2}(\mathcal{K}^{*})\), respectively, because we choose W 1 and W 2 from the relative interior of the homogenized dual systems (27) and (29), respectively.
If we apply the FRA-CE and reduce the size of SDP problems at each iteration as we have shown in Sect. 5.1, we will have the following equivalent problem to SDP (26):
Note that this problem has an interior feasible solution, and thus we can no longer apply our FRA.
We remark that when we work in the original space, although we see that \(\mathcal{F}_{2}\) is the minimal cone for SDP (26) by Lemma 3.3, our FRA does not terminate. In fact, any solution W in the homogenized dual system constructed from \(\mathcal{F}_{2}\) satisfies

Then any W with y (1,0)≠0 is a solution of (31). However, the solution is not included in span(W 1,W 2), so that our FRA finds W 3 and generates the third face \(\mathcal{F}_{3}\), which is the same as the minimal cone \(\mathcal{K}_{\min}\). Although all faces generated after \(\mathcal{F}_{2}\) are the same as the minimal cone \(\mathcal{K}_{\min}\), our FRA must find W i until \(\ker A\cap H_{c}^{-}\cap \mathcal{F}_{i}^{*}\subseteq\mbox{span}(W^{1}, \ldots, W^{i})\). This fact shows that if we add the condition \(\mathcal{F}_{i}\subseteq(\ker A\cap\ker c^{T}\cap \mathcal{F}_{i}^{*})^{\perp}\) in Step 2 of our FRA, the algorithm may terminate in fewer iterations than the original FRA and returns the minimal cone.
We next show that our FRA can generate a finer sequence of faces for SDP (26) in this example. If we choose W i from \((\mathcal{B}\cap \mathcal{F}_{i}^{*})\setminus \operatorname{relint}(\mathcal{B}\cap \mathcal{F}_{i}^{*})\), our FRA may provide a different sequence of faces from FRA-CE, i.e., the conic expansion approach. For example, if we choose W 1 with y (0,4)=0 at (28), W 1 is not in the relative interior of the homogenized dual system (27), and the first face \(\mathcal{G}_{1}\) by FRA and the dual \(\mathcal{G}^{*}_{1}\) are

Any solution \(\tilde{W}^{2}\) of the homogenized dual system obtained by \(\mathcal{G}_{1}\) has the form

If we choose \(\tilde{W}^{2}\) with y (0,2)<0 and y (4,0)<0, \(\tilde{W}^{2}\) is in the relative interior and we obtain the second face \(\mathcal{G}_{2}\):
Also the dual of \(\mathcal{G}_{2}^{*}\) is
Any solution \(\tilde{W}^{3}\) of the homogenized dual system by \(\mathcal{G}_{2}\) has the form

The matrix \(\tilde{W}^{3}\) with y (2,0)<0 is in the relative interior of the homogenized dual system by \(\mathcal{G}_{2}\) and the third face \(\mathcal{G}_{3}\) generated by \(\tilde{W}^{3}\) is
and is equivalent to the minimal cone for SDP (26). As we have already seen, our FRA does not terminate because \(\ker A\cap\ker c^{T}\cap\mathcal{G}_{3}^{*}\not\subseteq\mbox{span}(\tilde{W}^{1}, \tilde{W}^{2}, \tilde{W}^{3})\) and we need to find \(\tilde{W}^{i+1}\in(\ker A\cap\ker c^{T}\cap\mathcal{G}_{i}^{*})\setminus\mbox{span}(\tilde{W}^{1}, \ldots, \tilde{W}^{i}) \) until \(\ker A\cap\ker c^{T}\cap\mathcal{G}_{i}^{*}\subseteq\mbox{span}(\tilde{W}^{1}, \ldots, \tilde{W}^{i})\).
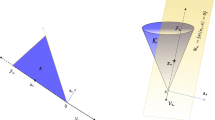
Figure 2 shows the relationships among faces \(\mathcal{F}_{i}\) and \(\mathcal{G}_{i}\).
Rights and permissions
About this article
Cite this article
Waki, H., Muramatsu, M. Facial Reduction Algorithms for Conic Optimization Problems. J Optim Theory Appl 158, 188–215 (2013). https://doi.org/10.1007/s10957-012-0219-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-012-0219-y