
Abstract
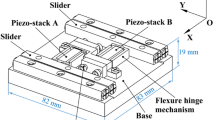
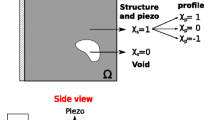
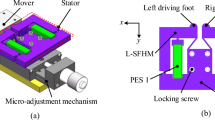
This paper presents a topology optimization method to design the piezoelectric stick–slip actuator. In particular, the vertical input displacement can be converted to the oblique displacement by the flexure hinge driving mechanism, and the large-stroke motion is realized. Based on the solid isotropic material with penalization (SIMP) model and combined with the motion characteristics of the stick–slip actuator, in order to obtain a larger output displacement and limit the parasitic displacement, the ratio of output displacement to input displacement is maximized as the objective function, and the relationship between parasitic displacement and output displacement is considered as a constraint condition. The method of moving asymptotes (MMA) is used to solve the optimization problem, and the driving mechanism structure is designed by the topology optimization result. The feasibility and reliability of the driving mechanism are verified by finite element analysis (FEA), then the prototype is fabricated. Experimental test results indicate that the velocity of the actuator reaches 15.25 mm/s under the locking force of 1 N and frequency of 650 Hz, and the resolution of 96 nm is achieved. This work shows that the topology optimization method can be used to improve the performance of the actuator.
















Similar content being viewed by others
References
Huang, H., Zhao, H.W., Fan, Z.Q., Zhang, H., Ma, Z.C., Yang, Z.J.: Analysis and experiments of a novel and compact 3-DOF precision positioning platform. J. Mech. Sci. Technol. 27(11), 3347–3356 (2013)
Hunstig, M.: Piezoelectric inertia motors: a critical review of history, concepts, design, applications, and perspectives. Actuators 6(1), 7 (2017)
Kang, D., Lee, M.G., Gweon, D.: Development of compact high precision linear piezoelectric stepping positioner with nanometer accuracy and large travel range. Rev. Sci. Instrum. 78(7), 075112 (2007)
Wang, S.P., Rong, W.B., Wang, L.F., Pei, Z.C., Sun, L.N.: Design, analysis and experimental performance of a novel stick-slip type piezoelectric rotary actuator based on variable force couple driving. Smart Mater. Struct. 26(5), 055005 (2017)
Bhowmick, S., Hintsala, E., Stauffer, D., Syed Asif, S.A.: In-situ SEM and TEM nanomechanical study of wear and failure mechanisms. Microsc. Microanal. 24(S1), 1934–1935 (2018)
Breguet, J. M., Driesen, W., Kaegi, F., Cimprich, T.: Applications of piezo-actuated micro-robots in micro-biology and material science. In: IEEE International Conference on Mechatronics and Automation, pp. 57–62. IEEE (2007)
Liu, Y.X., Wang, L., Gu, Z.Z., Quan, Q.Q., Deng, J.: Development of a two-dimensional linear piezoelectric stepping platform using longitudinal-bending hybrid actuators. IEEE Trans. Ind. Electron. 66(4), 3030–3040 (2019)
Tian, Y., Zhang, D., Shirinzadeh, B.: Dynamic modelling of a flexure-based mechanism for ultra-precision grinding operation. Precis. Eng. 35(4), 554–565 (2001)
Cherepanov, V., Coenen, P., Voigtländer, B.: A nano-positioner for scanning probe microscopy: the KoalaDrive. Rev. Sci. Instrum. 83(2), 023703 (2012)
Kratochvil, B.E., Dong, L.X., Nelson, B.J.: Real time rigid-body visual tracking in a scanning electron microscope. Int. J. Robot. Res. 28(4), 498–511 (2009)
Claeyssen, F., Letty, R.L., Barillot, F., Sosnicki, O.: Amplified piezoelectric actuators: static and dynamic applications. Ferroelectrics 351(1), 3–14 (2007)
Liu, Y.T., Higuchi, T., Fung, R.F.: A novel precision positioning table utilizing impact force of spring-mounted piezoelectric actuator—part II: theoretical analysis. Precis. Eng. 27(1), 22–31 (2003)
Mohith, S., Upadhya, A.R., Navin, K.P., Kulkarni, S.M., Rao, M.: Recent trends in piezoelectric actuators for precision motion and their applications: a review. Smart Mater. Struct. 30(1), 013002 (2021)
Wang, L., Chen, W.S., Liu, J.K., Deng, J., Liu, Y.X.: A review of recent studies on non-resonant piezoelectric actuators. Mech. Syst. Signal Process. 133, 106254 (2019)
Hunstig, M., Hemsel, T., Sextro, W.: Stick–slip and slip–slip operation of piezoelectric inertia drives. Part I: ideal excitation. Sens. Actuator A Phys. 200, 90–100 (2013)
Li, J.P., Huang, H., Morita, T.: Stepping piezoelectric actuators with large working stroke for nano-positioning systems: a review. Sens. Actuator A Phys. 292, 39–51 (2019)
Wang, L., Chen, D., Cheng, T.H., He, P., Lu, X.H., Zhao, H.W.: A friction regulation hybrid driving method for backward motion restraint of the smooth impact drive mechanism. Smart Mater. Struct. 25(8), 085033 (2017)
Iqbal, S., Malik, A.: A review on MEMS based micro displacement amplification mechanisms. Sens. Actuator A Phys. 300, 111666 (2019)
Kim, J.H., Kim, S.H., Kwak, Y.K.: Development of a piezoelectric actuator using a three-dimensional bridge-type hinge mechanism. Rev. Sci. Instrum. 74(5), 32918–32924 (2003)
Lee, H.J., Kim, H.C., Kim, H.Y., Gweon, D.G.: Optimal design and experiment of a three-axis out-of-plane nano positioning stage using a new compact bridge-type displacement amplifier. Rev. Sci. Instrum. 84(11), 115103 (2013)
Ling, M.X., Cao, J.Y., Zeng, M.H., Lin, J., Inman, D.J.: Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms. Smart Mater. Struct. 25(7), 075022 (2016)
Ueda, J., Secord, T.W., Asada, H.H.: Large effective-strain piezoelectric actuators using nested cellular architecture with exponential strain amplification mechanisms. IEEE/ASME Trans. Mechatron. 15(5), 770–782 (2010)
Li, J.P., Zhou, X.Q., Zhao, H.W., Shao, M.K., Hou, P.L., Xu, X.Q.: Design and experimental performances of a piezoelectric linear actuator by means of lateral motion. Smart Mater. Struct. 24(6), 065007 (2015)
Li, J.P., Zhou, X.Q., Zhao, H.W., Shao, M.K., Li, N., Zhang, S.Z., Du, Y.M.: Development of a novel parasitic-type piezoelectric actuator. IEEE/ASME Trans. Mechatron. 22(1), 541–550 (2017)
Cheng, T.H., He, M., Li, H.Y., Lu, X.H., Zhao, H.W., Gao, H.B.: A novel trapezoid-type stick–slip piezoelectric linear actuator using right circular flexure hinge mechanism. IEEE Trans. Ind. Electron. 64(7), 5545–5552 (2017)
Li, Y.K., Li, H.Y., Cheng, T.H., Lu, X.H., Zhao, H.W., Chen, P.F.: Note: Lever-type bidirectional stick-slip piezoelectric actuator with flexible hinge. Rev. Sci. Instrum. 89(8), 086101 (2018)
Qin, F., Huang, H., Wang, J.R., Zhao, H.W.: Design and performance evaluation of a novel stick-slip piezoelectric linear actuator with a centrosymmetric-type flexure hinge mechanism. Microsyst. Technol. 25(10), 3891–3898 (2019)
Lu, X.H., Gao, Q., Li, Y.K., Yu, Y., Zhang, X.S., Qiao, G.D., Cheng, T.H.: A linear piezoelectric stick-slip actuator via triangular displacement amplification mechanism. IEEE Access 8, 6515–6522 (2020)
Bendsøe, M.P., Kikuchi, N.: Generating optimal topologies in structural design using a homogenization method. Comput. Methods Appl. Mech. Eng. 71(2), 197–224 (1988)
Da, D.C.: Topology Optimization Design of Heterogeneous Materials and Structures. Wiley-ISTE, Hoboken (2019)
Liu, K., Tovar, A.: An efficient 3D topology optimization code written in Matlab. Struct. Multidiscipl. Optim. 50(6), 1175–1196 (2014)
Sigmund, O.: On the design of compliant mechanisms using topology optimization. Mechan. Struct. Mach. 25(4), 493–524 (1997)
Sigmund, O.: A 99 line topology optimization code written in Matlab. Struct. Multidiscip. Optim. 21, 120–127 (2001)
Lau, G.K., Du, H.J., Guo, N.Q., Lim, M.K.: Systematic design of displacement-amplifying mechanisms for piezoelectric stacked actuators using topology optimization. J. Intell. Mater. Syst. Struct. 11(9), 685–695 (2000)
Canfield, S., Frecker, M.: Topology optimization of compliant mechanical amplifiers for piezoelectric actuators. Struct. Multidiscip. Optim. 20, 269–279 (2020)
Yang, S.T., Xia, X., Liu, X., Qiao, G.D., Zhang, X.S., Lu, X.H.: Improving velocity of stick-slip piezoelectric actuators with optimized flexure hinges based on SIMP method. IEEE Access 8, 213122–213129 (2020)
Schlinquer, T., Mohand-Ousaid, A., Rakotondrabe, M.: Displacement amplifier mechanism for piezoelectric actuators design using SIMP topology optimization approach. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 4305–4311. IEEE (2018)
Zhang, X.M., Zhu, B.L.: Topology Optimization of Compliant Mechanisms. Springer, Berlin (2018)
Bendsøe, M.P., Sigmund, O.: Topology Optimization: Theory, Methods and Applications, 2nd edn. Springer, Berlin (2004)
Svanberg, K.: The method of moving asymptotes—a new method for structural optimization. Int. J. Numer. Methods Eng. 24(2), 359–373 (1987)
Svanberg, K.: MMA and GCMMA—two methods for nonlinear optimization. https://people.kth.se/~krille/mmagcmma.pdf
Acknowledgements
The authors would like to thank K. Svanberg for providing the MATLAB code of MMA optimizer.
Funding
This work was supported by the Science and Technology Development Plan of Jilin Province (Grant numbers 20200201057JC and 20190201108JC).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
No potential conflict of interest was reported by the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, S., Li, Y., Xia, X. et al. A topology optimization method and experimental verification of piezoelectric stick–slip actuator with flexure hinge mechanism. Arch Appl Mech 92, 271–285 (2022). https://doi.org/10.1007/s00419-021-02055-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-021-02055-4