
Abstract
With the development of multi-GNSS, the differential code bias (DCB) has been an increasing interest in the multi-frequency multi-GNSS community. Unlike code division multiple access (CDMA) mode used by GPS, BDS and Galileo etc., the GLONASS signals are modulated with frequency division multiple access (FDMA) mode. Up to now, the FDMA-aware GLONASS bias products are provided by two individual IGS analysis center (AC), i.e., CODE and GFZ. However, only the ionosphere-free (IF) combination IFB of P1 and P2 is available, while it is founded that the GLONASS IFB of GFZ on both frequencies are identical for the same receiver-satellite pair. In this contribution, the GLONASS IFB (inter-frequency bias) solution based on the spherical-harmonic (SH) ionospheric delay modeling as well as the undifferenced and uncombined PPP were carried out and evaluated. Based on the theoretical analysis, observations from 236 CMONOC stations and 172 IGS stations were collected for 2014 March and 2017 March for the numerical verification. The results suggested that the precision of IFB estimates was mainly subjected to the ionospheric status. Concerning the SH ionospheric delay modeling solution, the STD was 0.85 ns and 0.51 ns for 2014 and 2017, respectively. Concerning the undifferenced and uncombined PPP solution, the IFB was further dependent on the signal frequencies, and the STD was 1.43 ns and 1.94 ns for \({\mathrm{IFB}}_{1}\) and \({\mathrm{IFB}}_{2}\) in 2014, and the STD was 0.97 ns and 1.17 ns for \({\mathrm{IFB}}_{1}\) and \({\mathrm{IFB}}_{2}\) in 2017. When converted to the GF IFB from the individual IFB on each frequency, and compared to that of GF IFB of SH solution, it is revealed that the undifferenced and uncombined PPP solution has its advantages for IFB estimation on each individual frequency, and more efficient in data processing, while the solution based on the SH ionospheric delay modeling has its advantage in the precision of the GF IFB estimates. Thus, it is suggested that the SH model should be preferred for non-time-critical GF IFB concerned-only applications. Otherwise, the undifferenced and uncombined PPP solution is preferred. These IFB on each frequency was further converted to the ionosphere-free IFB and compared with the products of CODE analysis center.














Similar content being viewed by others


Data availability
GNSS observation data are provided by Crustal Movement Observation Network of China (CMONOC) and International GNSS Service (IGS). Data from CMONOC can be accessed from ftp://59.172.178.32:60009/cmonoc. Data from IGS are released by IGS data center CDDIS and can be accessed from ftp://cddis.gsfc.nasa.gov/. Clock and orbit products are released by IGS data center Wuhan University at ftp://igs.gnsswhu.cn/.
References
Al-Shaery A, Zhang S, Rizos C (2013) An enhanced calibration method of GLONASS inter-channel bias for GNSS RTK. GPS Solut. https://doi.org/10.1007/s10291-012-0269-5
Böhm J, Möller G, Schindelegger M, Pain G, Weber R (2015) Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut 19(3):433–441
Gong X, Lou Y, Zheng F, Gu S, Shi C, Liu J, Jing G (2018) Evaluation and calibration of BeiDou receiver-related pseudorange biases. GPS Solut. https://doi.org/10.1007/s10291-018-0765-3
Gu S (2013) Research on the zero-difference un-combined data processing model for multi-frequency GNSS and its applications. Ph.D., Wuhan University (in Chinese)
Gu S, Shi C, Lou Y, Feng Y, Ge M (2013) Generalized-positioning for mixed-frequency of mixed-GNSS and its preliminary applications. In: China satellite navigation conference (CSNC) 2013 proceedings. Springer, Berlin, pp 399-428
Gu S, Wang Y, Zhao Q, Zheng F, Gong X (2020) BDS-3 differential code bias estimation with undifferenced uncombined model based on triple-frequency observation. J Geodesy. https://doi.org/10.1007/s00190-020-01364-w
Hatch R (1982) The synergism of GPS code and carrier measurements. In: Proceedings of the third international geodetic symposium on satellite Doppler positioning, vol 2, pp 1213–1231
Hauschild A, Montenbruck O (2016) A study on the dependency of GNSS pseudorange biases on correlator spacing. GPS Solut 20(2):159–171
ICD-GLONASS (2008) Global navigation satellite system GLONASS interface control document, version 5.1, Moscow
Johnston G, Riddell A, Hausler G (2017) The international GNSS service. In: Teunissen PJG, Montenbruck O (eds) Springer handbook of global navigation satellite systems. Springer, Cham, pp 967–982. https://doi.org/10.1007/978-3-319-42928-1
Lanyi GE, Roth T (1988) A comparison of mapped and measured total ionospheric electron content using global positioning system and beacon satellite observations. Radio Sci 23(4):483–492
Lou Y, Zheng F, Gu S, Wang C, Guo H, Feng Y (2015) Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut 20(4):849–862. https://doi.org/10.1007/s10291-015-0495-8
Männel B, Brandt A, Nischan T, Brack A, Sakic P, Bradke M (2020) GFZ final product series for the International GNSS Service (IGS). GFZ Data Serv. https://doi.org/10.5880/GFZ.1.1.2020.002
Montenbruck O, Hauschild A, Steigenberger P (2014) Differential code bias estimation using multi-GNSS observations and global ionosphere maps. Navigation 61(3):191–201. https://doi.org/10.1002/navi.64
Prange L, Arnold D, Dach R, Schaer S, Stebler P, Villiger A, Jäggi A, Kalarus MS (2020) CODE product series for the IGS MGEX project. Published by Astronomical Institute, University of Bern. http://www.aiub.unibe.ch/download/CODE_MGEX. https://doi.org/10.7892/boris.75882.3
Rao CR (1973) Linear statistical inference and its applications. Wiley, New York
Revnivykh S (2010) GLONASS status and progress. Proc ION GNSS 2010:609–633
Schaer S (1999) Mapping and predicting the Earth’s ionospheric using global positioning system. University of Bern, Bern
Schaer S (2012) Activities of IGS bias and calibration working group. In: Meindl M, Dach R, Jean Y (eds) IGS Technical Report 2011. University of Bern, Astronomical Institute, Bern, pp 139–154
Schönemann E, Becker M, Springer T (2011) A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J Geod Sci 1(3):204–214. https://doi.org/10.2478/v10156-010-0023-2
Shi C, Yi W, Song W et al (2013) GLONASS pseudornge inter-channel biases and their effects on combined GPS/GLONASS precise point positioning. GPS Solut 17(4):439–451
Shi C, Guo S, Gu S, Yang X, Gong X, Deng Z et al (2018) Multi-GNSS satellite clock estimation constrained with oscillator noise model in the existence of data discontinuity. J Geodesy. https://doi.org/10.1007/s00190-018-1178-3
Teunissen PJG, Montenbruck O (2017) Springer handbook of global navigation satellite systems. Springer, Cham
Tsujii T, Harigae M, Inagaki T (2000) Flight tests of GPS/GLONASS precise positioning versus dual frequency KGPS profile. Earth Planet Space 52:825–829
Villiger A, Schaer S, Dach R, Prange L, Sušnik A, Jäggi A (2019) Determination of GNSS pseudo-absolute code biases and their long-term combination. J Geodesy 93(9):1487–1500. https://doi.org/10.1007/s00190-019-01262-w
Wang N, Yuan Y, Li Z, Montenbruck O, Tan B (2016) Determination of differential code biases with multi-GNSS observations. J Geodesy 90(3):209–228. https://doi.org/10.1007/s00190-015-0867-4
Welsch W (1979) A review of the adjustment of free networks. Surv Rev 25(194):167–180
Wilson BD, Mannucci AJ (1993) Instrumental biases in ionospheric measurements derived from gps data. In: Proceedings on ION GPS 1993, Salt Lake City, UT, USA, 22–24 Sept, pp 1343–1351
Xiang Y, Gao Y (2017) Improving DCB estimation using uncombined PPP. J Inst Navig 64(4):463–473
Yang X, Gu S, Gong X, Song W, Lou Y, Liu J (2019) Regional BDS satellite clock estimation with triple-frequency ambiguity resolution based on undifferenced observation. GPS Solut 23(2):1083. https://doi.org/10.1007/s10291-019-0828-0
Yasyukevich YV et al (2015) Influence of GPS/GLONASS differential code biases on the determination accuracy of the absolute total electron content in the ionosphere. Geomag Aeron 55(6):763–769
Zhang X, Xie W, Ren X, Li X, Zhang K, Jiang W (2017a) Influence of the GLONASS inter-frequency bias on differential code bias estimation and ionospheric modeling. GPS Solut 21(3):1355–1367. https://doi.org/10.1007/s10291-017-0618-5
Zhang R, Yao YB, Hu YM, Song WW (2017b) A two-step ionospheric modeling algorithm considering the impact of GLONASS pseudo-range inter-channel biases. J Geodesy 91(12):1435–1446. https://doi.org/10.1007/s00190-017-1034-x
Zhang B, Teunissen PJ, Yuan Y, Zhang X, Li M (2019) A modified carrier-to-code leveling method for retrieving ionospheric observables and detecting short-term temporal variability of receiver differential code biases. J Geodesy 93(1):19–28
Zhao Q, Wang YT, Gu S, Zheng F, Shi C, Ge M, Schuh H (2019) Refining ionospheric delay modeling for undifferenced and uncombined GNSS data processing. J Geodesy 93(4):545–560. https://doi.org/10.1007/s00190-018-1180-9
Zha J, Zhang B, Yuan Y, Zhang X, Li M (2019) Use of modified carrier-to-code leveling to analyze temperature dependence of multi-GNSS receiver DCB and to retrieve ionospheric TEC. GPS Solut 23(4):103
Zheng F, Gong X, Lou Y, Gu S, Jing G, Shi C (2019) Calibration of BeiDou triple-frequency receiver-related pseudorange biases and their application in BDS precise positioning and ambiguity resolutions. Sensors 19:3500. https://doi.org/10.3390/s19163500
Zhong J, Lei J, Dou X, Yue X (2016) Is the long-term variation of the estimated GPS differential code biases associated with ionospheric variability? GPS Solut 20:313–319. https://doi.org/10.1007/s10291-015-0437-5
Acknowledgements
This study is sponsored by the National Key Research and Development Plan (2016YFB0501802).
Author information
Authors and Affiliations
Contributions
Shengfeng Gu, Fu Zheng, Yidong Lou designed the research; Zheng Zhang and Shengfeng Gu performed the research; Zheng Zhang, Shengfeng Gu, Fu Zheng and Xiaopeng Gong analyzed the data; Shengfeng Gu and Zheng Zhang drafted the paper. All authors discussed, commented on and reviewed the manuscript.
Corresponding author
Appendix
Appendix
In this part, details of each receiver-satellite pair IFB were presented. Figures 15, 16, 17 and 18 present the GF IFB of CMONOC for March 2014, CMONOC for March 2017, IGS for March 2014 and IGS for March 2017 with the SH ionospheric delay modeling solution. Figures 19, 20, 21 and 22 present the IFB on each individual frequency of CMONOC for March 2014, CMONOC for March 2017, IGS for March 2014 and IGS for March 2017 with the PPP ionospheric delay modeling solution. Figures 23, 24, 25 and 26 present the GF IFB of CMONOC for March 2014, CMONOC for March 2017, IGS for March 2014 and IGS for March 2017 with the PPP ionospheric delay modeling solution.

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for CMONOC stations in March 2014 based on the SH ionospheric delay modeling solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.78 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for CMONOC stations in March 2017 based on the SH ionospheric delay modeling solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.50 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for IGS stations in March 2014 based on the SH ionospheric delay modeling solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.92 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for IGS stations in March 2017 based on the SH ionospheric delay modeling solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.52 ns


The mean value (a) and the STD (b) for GLONASS IFB (1: \({\mathrm{IFB}}_{1}\); 2: \({\mathrm{IFB}}_{2}\)) of each receiver-satellite pair for CMONOC stations in March 2014 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 1.73 ns


The mean value (a) and the STD (b) for GLONASS IFB (1: \({\mathrm{IFB}}_{1}\); 2: \({\mathrm{IFB}}_{2}\)) of each receiver-satellite pair for CMONOC stations in March 2017 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 1.06 ns


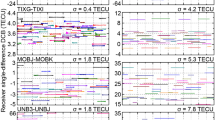
The mean value (a) and the STD (b) for GLONASS IFB (1: \({\mathrm{IFB}}_{1}\); 2: \({\mathrm{IFB}}_{2}\)) of each receiver-satellite pair for IGS stations in March 2014 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 1.64 ns


The mean value (a) and the STD (b) for GLONASS IFB (1: \({\mathrm{IFB}}_{1}\); 2: \({\mathrm{IFB}}_{2}\)) of each receiver-satellite pair for IGS stations in March 2017 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 1.107 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for CMONOC stations in March 2014 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 1.11 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for CMONOC stations in March 2017 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.63 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for IGS stations in March 2014 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.94 ns

The mean value (a) and the STD (b) for GLONASS IFB (\({\mathrm{IFB}}_{\mathrm{GF}}\)) of each receiver-satellite pair for IGS stations in March 2017 based on the undifferenced and uncombined PPP solution. The X-axis is grouped according to the receiver type. The color bar represents the STD value in ns, and the averaged STD is about 0.59 ns
Rights and permissions
About this article

Cite this article
Zhang, Z., Lou, Y., Zheng, F. et al. ON GLONASS pseudo-range inter-frequency bias solution with ionospheric delay modeling and the undifferenced uncombined PPP. J Geod 95, 32 (2021). https://doi.org/10.1007/s00190-021-01480-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00190-021-01480-1