
Abstract
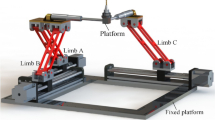
A novel six-DOF articulated moving platform parallel robot that combines two parallel sub-mechanisms to tilt the MP directly is proposed. Each sub-mechanism has five degrees of freedom and can translate the MP in three directions and rotate the MP around two axes, eliminating the need for a separate mechanism to tilt the MP. All the passive pairs comprise spherical pairs for simplifying the mechanism’s overall design. The robot consists of two DELTA-like sub-mechanisms and a rotation-screw mechanism between each MP of the sub-mechanism. The mobility of a parallel robot was calculated by the locking and releasing method using the screw theory. The proposed mechanism was verified to realize six-DOF motion by a prototype model created by a 3D printer.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Company, O., Pierrot, F., Krut, S., Nabat, V.: Simplified dynamic modelling and improvement of a four-degree-of-freedom pick-and-place manipulator with articulated moving platform. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 223, 13–27 (2009)
Wu, G., Lin, Z., Zhao, W., Zhang, S., Shen, H., Caro, S.: A four-limb parallel Schönflies motion generator with full-circle end-effector rotation. Mech. Mach. Theory 146, 103711 (2020)
Krut, S., Company, O., Nabat, V., Pierrot, F.: Heli4: a parallel robot for scara motions with a very compact traveling plate and a symmetrical design. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1656–1661 (2006)
Lallemand, J., Goudali, A., Zeghloul, S.: The 6-DOF 2-Delta parallel robot. Robotica 15(4), 407–416 (1997)
Vulliez, M., Zeghloul, S., Khatib, O.: Design strategy and issues of the Delthaptic, a new 6-DOF parallel haptic device. Mech. Mach. Theory 128, 395–411 (2018)
Wu, G.: Conceptual design and analysis of a 6-axis double delta robot towards high acceleration. In: Mechanism and Machine Science. Lecture Notes in Electrical Engineering, vol. 408, pp. 389–401 (2017)
Chen, X., Liu, X.J., Xie, F.: Screw theory based singularity analysis of lower-mobility parallel robots considering the motion/force transmissibility and constrainability. Math. Probl. Eng. 2015, 1–11 (2015)
Liu, W., Liu, H.: Synthesis of asymmetric parallel mechanism with multiple 3-DOF motion modes. Adv. Mech. Eng. I4(2), 1–18 (2022)
Meng, Q., Xie, F., Liu, X.J., Takeda, Y.: Screw theory-based motion/force transmissibility analysis of high-speed parallel robots with articulated platforms. J. Mech. Robot. 14(4), 041011, 15 pages (2020)
Lynch, K.M., Park, F.C.: Modern Robotics: Mechanics, Planning, and Control, p. 100. Cambridge University Press (2017)
Dai, J.S., Jones, J.J.: A linear algebraic procedure in obtaining reciprocal screw systems. J. Robot. Syst. 20(7), 401–412 (2003)
Zhao, J., Li, B., Yang, X., Yu, H.: Geometrical method to determine the reciprocal screws and applications to parallel manipulators. Robotica 27, 929–940 (2009)
Acknowledgment
This work was supported by JSPS KAKENHI Grant Number JP21K03987.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Harada, T., Yase, H. (2023). Mobility Analysis of a Novel Six-DOF Parallel Robot with Additional Rotation and Plate Tilting Mechanisms. In: Okada, M. (eds) Advances in Mechanism and Machine Science. IFToMM WC 2023. Mechanisms and Machine Science, vol 147. Springer, Cham. https://doi.org/10.1007/978-3-031-45705-0_80
Download citation
DOI: https://doi.org/10.1007/978-3-031-45705-0_80
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-45704-3
Online ISBN: 978-3-031-45705-0
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)