
Abstract
Let’s extend our free vibration analysis from Chap. 2 to include two degrees of freedom in the model. This would make sense, for example, if we completed a measurement to determine the frequency response function (FRF) for a system and saw that there were obviously two modes of vibration within the frequency range of interest; see Fig. 4.1.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Notes
- 1.
The Greek scholar Archimedes is historically credited with this interjection. As the story goes, he noticed that the water level rose in proportion to his body’s volume when he stepped into a bath. The account continues that he was so excited by this discovery that he ran through the streets of Syracuse naked (http://en.wikipedia.org/wiki/Eureka_(word)). Typical engineer!
- 2.
Matrix multiplication is not commutative, in general, so the order of multiplication matters. The term premultiply means the term appears on the left of the product. The term postmultiply means that the term appears on the right.
- 3.
Due to round-off error, the off-diagonal terms in the modal matrices may not be identically zero. However, they will be significantly smaller than the on-diagonal terms.
References
Blevins RD (2001) Formulas for natural frequency and mode shape. Krieger, Malabar (Table 8–1)
Author information
Authors and Affiliations
Corresponding author
Exercises
Exercises
-
1.
Given the eigenvalues and eigenvectors for the two degree of freedom system shown in Fig. P4.1, determine the modal matrices m q (kg), c q (N-s/m), and k q (N/m).
$$ {s_{{1}}}^{{2}} = - {1} \times {1}{0^{{6}}}{\hbox{rad}}/{{\hbox{s}}^{{2}}} $$$$ {s_{{2}}}^{{2}} = - {7} \times {1}{0^{{6}}}{\hbox{rad}}/{{\hbox{s}}^{{2}}} $$$$ \begin{array}{lllll}{{\psi_1} = \left\{ \begin{array}{lllll}{0.5} \\1 \\\end{array} \right\}} & {{\psi_2} = \left\{ \begin{array}{lllll}{ - 2.5} \\1 \\\end{array} \right\}} \\\end{array} $$Fig. P4.1 
Two degree of freedom spring-mass-damper system
-
2.
Given the two degree of freedom system in Fig. P4.2, complete the following.
-
(a)
Write the equations of motion in matrix form.
-
(b)
Write the system characteristic equation using Laplace notation. Your solution should be a polynomial that is quadratic in s 2 with appropriate numerical coefficients.
-
(c)
Calculate the natural frequencies (in Hz).
-
(d)
Determine the two mode shapes (normalize to coordinate x 1).
Fig. P4.2 
Two degree of freedom spring-mass system
-
(a)
-
3.
Given the two degree of freedom system shown in Fig. P4.3, complete the following.
Fig. P4.3 
Two degree of freedom spring-mass system
-
(a)
Write the equations of motion in matrix form.
-
(b)
Write the system characteristic equation using Laplace notation. Your solution should be a polynomial that is quadratic in s 2 with appropriate numerical coefficients.
-
(c)
Determine the natural frequencies (in rad/s).
-
(d)
Determine the mode shapes (normalize to coordinate x 2).
-
(a)
-
4.
A two degree of freedom spring-mass system is shown in Fig. P4.4. For harmonic free vibration, complete the following if k = 5 × 106 N/m and m = 2 kg.
Fig. P4.4 
Two degree of freedom spring-mass system
-
(a)
Draw the free body diagram showing the forces on the two masses during vibration.
-
(b)
Write the two equations of motion in matrix form. First show the equations symbolically and then substitute the numerical values for m and k.
-
(c)
Write the characteristic equation for this system. First show the equation symbolically and then substitute the numerical values for m and k.
-
(d)
Determine the numerical roots of the characteristic equation (which is quadratic in s2). What do these two roots represent?
-
(e)
Determine the two mode shapes for this system. Normalize the mode shapes to coordinate x 1.
Fig. P4.5 
Two degree of freedom spring-mass system
-
(a)
-
5.
A two degree of freedom spring-mass system is displayed in Fig. P4.5. For harmonic free vibration, complete the following if k 1 = 2 × 106 N/m, m 1 = 0.8 kg, k 2 = 1 × 106 N/m, and m 2 = 1.4 kg. The initial displacements for the system’s free vibration are x 1(0) = 2 mm and x 2(0) = 1 mm and the initial velocities are \( {\dot{x}_1}(0) = 0\;{\hbox{mm/s}} \) and \( {\dot{x}_2}(0) = 5\;{\hbox{mm/s}} \).
-
(a)
Calculate the two natural frequencies and mode shapes. Normalize the mode shapes (eigenvectors) to coordinate x 2.
-
(b)
Define the modal matrix and determine the modal mass and stiffness matrices.
-
(c)
Write the uncoupled single degree of freedom time responses for the modal coordinates q 1 and q 2. Use the following form: \( {q_{{1,2}}}(t) = {A_{{1,2}}}\cos \left( {{\omega_{{{n_{{1,2}}}}}}t} \right) + {B_{{1,2}}}\sin \left( {{\omega_{{{n_{{1,2}}}}}}t} \right) \) with units of mm.
-
(d)
Write the time responses for the local coordinates x 1 and x 2 (in mm).
-
(e)
Plot the time responses for x 1 and x 2 (in mm). Define the time vector as: t = 0:0.0001:0.2; (in seconds).
-
(a)
-
6.
For the same system as described in problem 5, complete the following.
-
(a)
The initial displacements for the system’s free vibration are x 1(0) = 0.378 mm and x 2(0) = 1 mm and the initial velocities are \( {\dot{x}_1}(0) = 0\;{\hbox{mm/s}} \) and \( {\dot{x}_2}(0) = 0\;{\hbox{mm/s}} \). Plot the time responses for x 1 and x 2 (in mm). Define the time vector as: t = 0:0.0001:0.2; (in seconds). What is the vibrating frequency for both \( {x_1}(t) \) and \( {x_2}(t) \)? What is special about these initial conditions to give this result?
-
(b)
The initial displacements for the system’s free vibration are x 1(0) = −4.628 mm and x 2(0) = 1 mm and the initial velocities are \( {\dot{x}_1}(0) = 0\;{\hbox{mm/s}} \) and \( {\dot{x}_2}(0) = 0\;{\hbox{mm/s}} \). Plot the time responses for x 1 and x 2 (in mm). Define the time vector as: t = 0:0.0001:0.2; (in seconds). What is the vibrating frequency for both \( {x_1}(t) \) and \( {x_2}(t) \)? What is special about these initial conditions to give this result?
-
(a)
-
7.
A two degree of freedom spring-mass-damper system is shown in Fig. P4.7. For harmonic free vibration, complete the following if k 1 = 2 × 105 N/m, c 1 = 60 N-s/m, m 1 = 2.5 kg, k 2 = 5.5 × 104 N/m, c 2 = 16.5 N-s/m, and m 2 = 1.2 kg.
Fig. P4.7 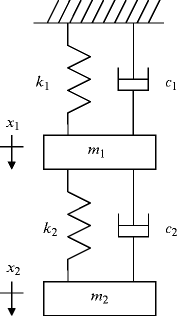
Two degree of freedom spring-mass-damper system under free vibration
-
(a)
Verify that proportional damping exists.
-
(b)
Define the modal matrix and determine the modal mass, stiffness, and damping matrices. Normalize the mode shapes to coordinate x 2.
-
(a)
-
8.
Given the two degree of freedom system in Fig. P4.8, complete the following.
Fig. P4.8 
Two degree of freedom spring-mass system
-
(a)
Write the equations of motion in matrix form.
-
(b)
Verify that proportional damping exists.
-
(c)
Determine the roots of the characteristic equation. What do these roots represent?
-
(d)
Determine the two mode shapes (normalize to coordinate x 1).
-
(a)
-
9.
Determine the mass, damping, and stiffness matrices in local coordinates for the model shown in Fig. P4.9.
Fig. P4.9 
Three degree of freedom spring-mass-damper model
-
10.
Given the mass, damping, and stiffness matrices for the model shown in Fig. P4.9 determined from problem 9, can proportional damping exist for this system? Justify your answer.








Rights and permissions
Copyright information
© 2012 Springer Science+Business Media, LLC
About this chapter
Cite this chapter
Schmitz, T.L., Smith, K.S. (2012). Two Degree of Freedom Free Vibration. In: Mechanical Vibrations. Springer, Boston, MA. https://doi.org/10.1007/978-1-4614-0460-6_4
Download citation
DOI: https://doi.org/10.1007/978-1-4614-0460-6_4
Published:
Publisher Name: Springer, Boston, MA
Print ISBN: 978-1-4614-0459-0
Online ISBN: 978-1-4614-0460-6
eBook Packages: EngineeringEngineering (R0)