Collection
Special Issue: Task planning and motion control problems of service robots in human-centered environments
A practical service in a human centered environment requires well planned tasks which are often represented in abstract manners. For a care-providing robot to execute the tasks, it requires precise and adequate motions of each part of the robot system, which often requires metric data. Furthermore, physical interaction of the robot with the human centric environment or objects in human living space and robust perception of such environments make the problem even harder. Recent advances in robotic systems, manipulation technologies, sensory systems, perception technologies, computing powers, and artificial intelligence provide tangible building-blocks toward human-care service robot technologies. By gathering a wide spectrum of technologies for human care service robots, this issue will establish ISR at the forefront of the next wave of intelligent service robots. The central theme of the Special Issue is task planning and motion control problems of service robots in human centered environments and will capture the surge of interest in the application of AI technologies to task planning and motion control of service robots.
We welcome original, significant and visionary papers describing scientific methods and technologies that steps toward the realization of service robots. The content could also present surveys and reviews that summarize state-of-the-art practices in this arena. Special attention will be paid to papers focusing on task-motion planning, motion control applications to service robots, mobile-manipulator problems for service robots, knowledge modelling for social service robots, dual arm manipulation for service robots, affordance modelling and recognition in everyday life objects, and AI applications for service robots. Submissions of scientific results from experts in academia and industry worldwide will be strongly encouraged.
Topics to be covered include, but are not limited to:
Task-motion planning for service robots; Bimanual/dual-arm manipulation for service robots; Non-prehensile manipulation for service robots; Machine learning for manipulation; Social behavior for service robots; Manipulation for service robots; Mobile-manipulator planning and control; Artificial Intelligence for service robots; Affordance modeling and recognition; Semantic segmentation for service robots
Editors
-
Hyungpil Moon
School of Mechanical Engineering, Sungkyunkwan University, Korea
-
Byoung-Tak Zhang
AI Institute, Seoul National University (SNU), Korea
-
Changjoo Nam
Department of Information and Communication Engineering, Inha University, Incheon, South Korea

Articles (10 in this collection)
-
-
Combined task and motion planning system for the service robot using hierarchical action decomposition
Authors (first, second and last of 5)

-
Execution and perception of upper limb exoskeleton for stroke patients: a systematic review
Authors (first, second and last of 5)

-
Dual-layer multi-robot path planning in narrow-lane environments under specific traffic policies
Authors (first, second and last of 4)

-

-
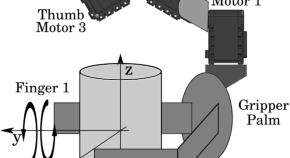
Tactile object recognition in early phases of grasping using underactuated robotic hands
Authors (first, second and last of 4)
-
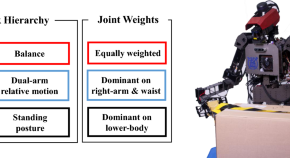
Weighted hierarchical quadratic programming: assigning individual joint weights for each task priority
Authors (first, second and last of 5)
-

-
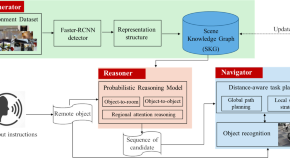
Remote object navigation for service robots using hierarchical knowledge graph in human-centered environments
Authors (first, second and last of 4)
-
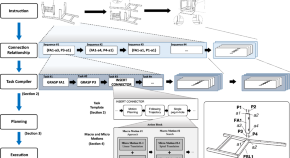
Robotic furniture assembly: task abstraction, motion planning, and control
Authors (first, second and last of 8)