
Abstract
Bridge Bearings are important devices for transferring loads between the upper and lower structures of bridges. They can ensure the safety of bridges and regulate deformation. They can also prevent bridge displacement caused by temperature changes, seismic forces, and other factors in various structural types. The status of bridge bearings can effectively reflect the healthy status of the bridge. Monitoring of stresses on bridge bearings can be used to evaluate the healthy status of the bridge structure. However, bridge bearings are installed in invisible locations, and traditional manual inspection methods cannot accurately determine their damage and degree of destruction. In this paper, an intelligent bearing pair is designed to resolve this problem. The designed intelligent bearing status assessment system with multi-level threshold values can trigger a warning when the threshold is exceeded. Experiments have been conducted to verify the accuracy of its signal processing.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
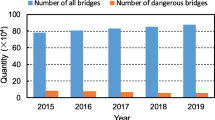
Bridges, as an important part of highways, are key hubs of transportation systems. Bridge construction has made great progress in recent years around the world. The wide application of bridges makes logistics and transportation more convenient, and traffic volume increases day by day. However, due to design defects, erosion, and aging of the stressed members, the bridges may be damaged with different degrees. As a result, bridge collapse may lead to different degrees of economic losses and human casualties. To reduce the occurrence of similar accidents, the traditional practice is to conduct periodic inspections of bridge structures. The reliability and safety of the structure are assessed based on the inspection results. However, this approach is costly, non-real-time, and poor in integrity and real-time. Thus, it cannot effectively ensure the safety and durability of bridges during usage. With the development of electronic information technologies, intelligent health monitoring systems for bridge structures have come into being [1,2,3,4]. Unlike the static observation method of structural inspection, intelligent monitoring of bridge structures is real-time dynamic monitoring. By analyzing the real-time stress signal of the bridge, the safety status of the bridge can be obtained. The system mainly includes components such as advanced sensor subsystems [5, 6], stable data acquisition and data transmission systems [7, 8], and reliable monitoring and safety assessment platforms [9, 10]. The modules of the system operate in different hardware or software environments and work in concert to accomplish the intelligent health monitoring and safety assessment functions of bridge structures.
2 The Bearing Capacity Experiment of Bridge Intelligent Bearing
2.1 Equipment and Purpose of the Experiment
The purpose of this experiment is to verify the accuracy of signal processing of force measuring bearings and calibrate the relationship between the calibrated measuring point stress and the intelligent bearing sensor. The experiment data is used to determine the threshold values of each level for multi-level warning of the bearing status, and to provide data support for the intelligent bearing status evaluation system.
A press with a maximum value of 300 MN was used for this experiment, which can realize the functions of equal-rate loading, equal-rate displacement test, load holding, etc. The physical diagram of the pressure test machine is shown in Fig. 1. The intelligent support adopts model GPZ (II)-2.0–10%-GD, as shown in Fig. 2.

Pressure machine

The appearance of Bridge Intelligent Bearing
2.2 Process of the Experiment
Before the experiment starts, the sensors will be installed in the four corresponding positions of the Bridge Intelligent Bearing. The collection equipment will be installed on the test bench and powered on for testing. The test is officially conducted after the equipment works normally. The equipment arrangement is shown in Figs. 3 and 4.

The arrangement of acquisition equipment

The arrangement of Bridge Intelligent Bearing
During the experiment, the vertical application pressure is loaded and unloaded at 11 levels, which are 0, 0.55, 0.868, 1, 1.468, and 1.71 MN. When the pressure machine is loaded to a certain level, it is held under that load for three minutes. When the level of 1.71 MN grade is reached, unloading is performed in a graded manner. The experiment test has been repeated three times.
2.3 The Results of the Experiment
Firstly, the vertical applied pressure F (MN) of the press is converted into the compressive stress P (MPa) of the rubber sheet, as shown in Eq. (1).
where P is the value of compressive stress applied vertically in MPa; F is the vertical applied pressure in MN; d is the diameter of the rubber sheet 0.33 m.
The calculated values were used as theoretical values, and the data were compared with the compressive stress values of the four measurement points obtained from the acquisition equipment to obtain the relationship curves, as shown in Fig. 5.

The relationship curve between stress and theoretical value at each measurement point of fixed support
The average error percentage of each measurement point is obtained by summing and averaging according to the relative error, as shown in Eq. (2).
where z, xi, and yi denote the average error ratio, measured value, and theoretical value, respectively. The average error percentages of measurement points 1, 2, 3, and 4 are 8.38%, 10.60%, 8.90%, and 11.60%, respectively. The results show that the compressive stress values from the acquisition system are highly accurate.
3 Conclusion
To realize bridge health monitoring, we designed the intelligent bearing system by mearing the force loaded on the bearings. The signal accuracy of the force measuring was verified through experiments. The whole system errors could be eliminated by data obtained from the experiment. The experiments we conducted verified the feasibility of the intelligent bearing, which provides theoretical support for the practical application of the subsequent health monitoring system.
References
Philip SM, Frangopol DM (2008) Reinforced concrete bridge deck reliability model incorporating temporal and spatial variations of probabilistic corrosion rate sensor data. Reliab Eng Syst Saf 93(3):394–409
Liuyu Z (2011) Construction of intelligent control and safety warning system for long-span continuous rigid frame bridge. In: 2011 fourth international conference on intelligent computation technology and automation, pp 372–375
Zhou GD, Yi TH (2013) Recent developments on wireless sensor networks technology for bridge health monitoring. Math Prob Eng 1–33
Yu J, Ziehl P, Zárate B et al (2011) Prediction of fatigue crack growth in steel bridge components using acoustic emission. J Constr Steel Res 67(8):1254–1260
Nagayama T, Spencer BF, Rice JA (2009) Autonomous decentralized structural health monitoring using smart sensors. Struct Control Health Monit 16(7):842–859
Yao Y, Glisic B (2015) Sensing sheets: optimal arrangement of dense array of sensors for an improved probability of damage detection. Struct Health Monit 14(5):513–531
Zou Z, Bao Y, Li H, Spencer BF, Ou J (2015) Embedding compressive sensing-based data loss recovery algorithm into wireless smart sensors for structural health monitoring. IEEE Sens J 15(2):797–808
Zou Z, Bao Y, Deng F, Li H (2015) An approach of reliable data transmission with random redundancy for wireless sensors in structural health monitoring. IEEE Sens J 15(2):809–818
Sun Z, Zhang Y (2016) Failure mechanism of expansion joints in a suspension bridge. J Bridg Eng 21(10):1–13
Siringoringo DM, Fujino Y, Namikawa K (2014) Seismic response analyses of the Yokohama bay cable-stayed bridge in the 2011 great east Japan earthquake. J Bridg Eng 19(8):1–17
Acknowledgements
This research was funded partially by Key Coordinative Innovation Plan of Guangdong Province, Technology Developing Project of Shenzhen, grant number Key 20180126, National Natural Science Foundation of China, grant number 41904158, the China Postdoctoral Science Foundation, grant number 2019M652385, Shandong postdoctoral innovation project, grant number Key 202002004, and the Young Scholars Program of Shandong University, Weihai (20820201005), Weihai Science and Technology Development Plan.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Teng, G., Cao, X., Gai, W., Jiang, R. (2023). An Experimental Study on Intelligent Bearing System for Bridge Health Monitoring. In: Wang, S., Li, J., Hu, K., Bao, X. (eds) Proceedings of the 2nd International Conference on Innovative Solutions in Hydropower Engineering and Civil Engineering. HECE 2022. Lecture Notes in Civil Engineering, vol 235. Springer, Singapore. https://doi.org/10.1007/978-981-99-1748-8_28
Download citation
DOI: https://doi.org/10.1007/978-981-99-1748-8_28
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-1747-1
Online ISBN: 978-981-99-1748-8
eBook Packages: EngineeringEngineering (R0)