
Abstract
Maximum displacement and the maximum interstorey drift ratio are the important factors for the measurement of the vulnerability of multistorey buildings. For this reason, in this paper a method was proposed to calculate the maximum displacement and maximum interstorey drift ratio (IDR) values. In this model, reinforced concrete multistorey structure was modeled as an equivalent flexural-shear frame. Maximum displacement and the maximum IDR were calculated according to the Equivalent Static Loads Method and The Response Spectrum Method using the continuum model and the results were tabulated. With the help of the obtained tables by this study, the maximum displacement and the maximum IDR of the regular multistorey structures can be calculated quickly and practically. The axial deformation of the vertical elements (columns and shear walls) were approximately considered in the study. The convergence of the presented method to the Finite Elements Method was investigated by two examples in the last part of the study.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
- Hand method
- Maximum displacement
- Maximum interstorey drift ratio (IDR)
- Response spectrum method
- Equivalent static loads method
1 Introduction
One of the effective and practical methods used in the analysis of shear wall-frame systems is the continuum method. There have been many studies dealing with the method which was first used by Chitty in 1940 [1]. These studies include various situations such as static analysis and dynamic analysis [2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26]. Stafford Smith et al. proposed an approximate method for calculating the displacement of the high-rise buildings under triangular distributed loads, taking account of the continuum model [27]. Heidebrecht ve Rutenberg proposed an approach to determine the performance of frame systems by utilizing the intersorey drift ratios. In the study, the frame system was modeled as an equivalent shear beam [28]. Gülkan and Akkar proposed a method for determining IDR of the structures of which the bearing system consisting of frames. In the study, the multistorey frame system was idealized as an equivalent shear beam to achieve the maximum IDR [29]. In Miranda and Akkar's work, they proposed a method of using graphs for response spectrum analysis by using the flexural-shear beam to obtain the IDR [16]. Xie and Wen used the Timoshenko beam model to calculate the IDRs of multistorey structures [30]. Khaloo and Khosravi investigated the effect of modes in the structures under near fault pulse like ground motions. In the study, the structure was idealized as an equivalent flexural shear beam according to the continuum method [31].
Yang, Pan and Li used the flexural-shear beam model to determine the maximum IDR of the structures under near-fault ground motion [32].
Fardipour et al. proposed a practical method of determining the maximum IDR for Australia, depending on the height of the building, the type of bearing system, the change in the stiffness and the mass [33]. Shodja and Rofooei developed a method based on the discrete mass model for determining the drift spectrum. In the method, the variation of the structure stiffness along the height of the structure is also taken into consideration [34]. Tekeli, Atımtay and Turkmen proposed a method for determining the lateral displacement of the reinforced concrete frame structures under the static loads. In the method, the frame system was considered as an equivalent shear frame [35]. In this study, a method has been proposed in which the maximum displacement and the maximum IDR are quickly and practically determined by means of tables for both Response Spectrum Analysis and Equivalent Static Loads Method. Subsequent paragraphs, however, are indented.
In creating the tables for the method, it is assumed that
-
The properties of the building is constant and the mass is uniformly distributed up to the height of the building.
-
The shear deformations of the columns, shear walls and the beams are neglected.
-
The axial deformations of the beams are neglected.
-
The torsion is neglected.
-
The material is considered as linear elastic and the nonlinear geometric effects are ignored.
-
Slabs are assumed infinitely rigid in their own planes.
2 Response Spectrum Analysis by the Presented Method
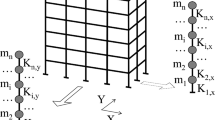
The reinforced concrete multistorey building can be modeled as an equivalent flexural-shear beam as seen in Fig. 1.

The equivalent flexural-shear beam model of the structure
In accordance with this model, the 4th order parabolic partial differential equation of the system with undamped free vibration is written as follows.
where z is the vertical axis, and m/h is the distributed mass up to the height of the building. Ks is the equivalent shear stiffness and it is calculated by the following equation [4, 12].
where h is the storey height, E is the modulus of elasticity, r and s are the contributions of columns and beams to the shear stiffness which are calculated by the following equations.
In the combined shear wall- frame system in Fig. 2, the shear stiffness is calculated approximately by the following equation.

The combined shear wall-frame system
Here 1.1 is the correction factor.
The total bending stiffness of the shear walls and columns is shown as (EI) and it is calculated by the following equation [4, 12].
If the partial differential Eq. (1) is separated into the variables using the Eq. (7), the ordinary differential equations in (8) and (9) are obtained.
Here, y shows the modal shape and ω denotes the angular frequency. The boundary conditions of the 4th order constant coefficient homogeneous ordinary differential Eq. (8) are that, the displacement and rotation at the base of the structure are zero and the bending moment and the shear force at the top point are zero. These boundary conditions are given below.
To make differential Eq. (8) dimensionless, the following transformation can be used.
Equation (15) is obtained when the transformation in Eq. (14) is applied to the Eq. (8).
With the aim of the reduction, the parameters in Eq. (15) are defined as follows
The solution of the differential Eq. (15) is obtained as follows.
Here, a1 and a2 are shown below.
The boundary conditions given in the Eqs. (10), (11), (12) and (13) are written in dimensionless form as follows.
If the non-dimensional boundary conditions are written in Eq. (18), the following frequency equation is obtained.
If the necessary arrangements are made in this frequency equation, the following equation is obtained.
After calculating α values which make the Eq. (26) zero, with the help of Eq. (17), the natural vibration periods are found as follows.
The Zi period parameters in Eq. (27) are given in Table 1 depending on the k parameter for the first three modes.
Using the frequency equation and boundary conditions, the mode shapes are found by the following equation.
E can be calculated by the following equation.
The modal participation factor required for the Response Spectrum Analysis is calculated by the following equation as known from the literature [36].
For the i-th mode shape, the maximum displacement is calculated by the Eq. (31).
where Sdi is the displacement spectral ordinate for the i-th mode and it can be obtained either from the design spectrum, or from the displacement spectrum created for a particular earthquake record.
The μi values given here are calculated for the first three modes and they are given in Table 2.
By using the maximum displacements obtained for the three modes and with the help of the SRSS rule, the maximum displacements is calculated by Eq. (32).
For the dimensionless IDR, if the derivative of Eq. (28) is taken the following equation is obtained.
To find the maximum value of the Eq. (33), the derivation must be taken and equalized to zero.
Ɛimax which makes the Eq. (34) equal to zero is different for three modes. For the Ɛ values, which make the IDR maximum in related mode, IDRs for the other modes are calculated by the equation below
The β values in Eq. (35) are given in Tables 3, 4 and 5 considering the location of the maximum IDR in the first three modes. Also in Tables 6, 7 and 8, locations of maximum IDRs are given for the first three modes.
In this case, IDR values where the maximum IDR of the related mode is located are calculated according to the SRSS rule for the first three modes by the following equations.
And eventually, the maximum IDR is obtained as the largest of these three values.
3 Equivalent Static Load Analysis by the Presented Method
The shear wall-frame system under the triangular distributed load which represent the equivalent static loads is given in the Fig. 3.

The shear wall-frame system under the triangular distributed load
In this case, the horizontal equilibrium equation is written as follows.
The boundary conditions of Eq. (40) are Eqs. (10), (11), (12) and (13).
To make the Eq. (40) dimensionless, the transform in Eq. (14) is used.
The dimensionless parameter k is defined by the Eq. (16).
Equation (43) is obtained if the following definition is made in Eq. (41).
The solution of the 4th order constant-coefficient nonhomogeneous differential equation in (43) is obtained as follows.
If the dimensionless boundary conditions in Eqs. (21), (22), (23) and (24) are applied in the Eq. (44), the displacement function is obtained as follows.
Here S1 and S2 are defined as below.
In the Equivalent Static Loads Method, the following equation can be written for the base shear force.
Equation (49) is obtained by using the Eqs. (42) and (48).
With the help of Eq. (27), EI is obtained as follows.
Equation (51) is written by using Eqs. (49) and (50).
The total mass of the building can be written as:
Equation (53) can be written by the help of Eq. (52)
According to the Equivalent Static Loads Method, base shear force can be written as follows.
Here, Sa1 represents the design spectral acceleration value for the first mode.
Equation (55) is obtained if the Eq. (54) is written in Eq. (53).
If the Eq. (56) is written instead of the square of the period and the Eq. (57) as known from the structure dynamics is written instead of the design spectral acceleration value, Eq. (58) is obtained.
Maximum displacement is calculated by the equation below with the help of Eqs. (45), (46), (47) and (58).
Equation (59) can be written as below.
In Eq. (60), the change in ν values according to k2 is given in Table 9.
Using the displacement function in Eq. (45), IDR is found as below.
If the derivation of the function is taken to find the location where the IDRs are maximum in Eq. (61), Eq. (62) is obtained.
Ɛ values that make the Eq. (62) zero, show where the IDR is maximum. These Ɛ values are calculated by Eq. (62) for different k values and given in Table 10.
By using Eqs. (46), (47) and (58) in Eqs. (61), (63) is obtained.
If Ɛ = Ɛmax is written in Eq. (63), the maximum IDR can be obtained as below.
The η values given in Eq. (64) are calculated and presented in Table 11 depending on k2
4 Contribution of the Axial Deformation
In the presented method, the effect of axial deformations can be approximately taken into account with the approach known from the literature [12]. To this end, KSa is written instead of KS and it is calculated by the following equation [12].
Here, r is correction coefficient and it is found with the help of the equation below.
D is the global axial stiffness and it is calculated using the following equation.
Aci is the plan area of the i-th column, ti shows the distance of the column to the center of gravity in the plan.
5 Numerical Examples
In order to investigate the convergence of the presented method to the Finite Element Method, two examples were solved by the presented method and the results were compared with ETABS.
One of the examples was a 7-storey reinforced concrete structure consist of frames, whereas the second example was a reinforced concrete structure having 15-storey shear wall-frame system.
5.1 Example 1
7-storey reinforced concrete structure of which the bearing system consists of frames, given in Fig. 4 was analyzed by using the presented method in this study. For this purpose, both the Equivalent Static Loads Method and Response Spectrum Analysis were applied to the example. The results obtained by the presented method were compared with the ones obtained by ETABS.

Plan of the frame system
The height of each storey was 3 m. All columns were 45 cm/45 cm, beams were 25 cm/50 cm and the modulus of the elasticity is 32,000 Mpa. The mass of the storeys were taken as 748,800 kg. The structure was considered in the second seismic zone, local site class Z3 and the seismic load reduction factor was eight for the analysis according to Turkish Earthquake Code.
The comparisons of the presented method and ETABS for the values of maximum displacement and the maximum IDR obtained for the Equivalent Static Loads Method were given in Table 12.
As shown in Table 12, the ratio of the maximum difference between the proposed method and ETABS is 9.52%
The comparisons of the presented method and ETABS for the values of maximum displacement and the maximum IDR obtained for the Response Spectrum Analysis were given in Table 13.
As it is seen in Table 13, the maximum error according to the solutions by the Response Spectrum Analysis is 5.45%.
5.2 Example 2
15-storey reinforced concrete shear wall-frame structure seen in Fig. 5 was analyzed for the y direction by performing both the Equivalent Static Loads Method and the Response Spectrum Method. The results of the presented method and ETABS were compared.

Plan of the shear wall frame system
The height of each storey was 3 m, columns were 65 cm/65 cm and beams were 30 cm/60 cm, thickness of the shear wall, which was modeled by shell elements in ETABS was 50 cm. The modulus of the elasticity was 33,000 Mpa and the mass of the storeys were taken as 760,000 kg. The structure was considered in the second seismic zone, local site class Z3 and the seismic load reduction factor was six for the analysis according to Turkish Earthquake Code.
The comparison of the first three periods calculated for the structure was given in Table 14.
The comparison of the maximum displacement and the maximum IDR for Equivalent Static Loads Method was given in the Table 15.
It was seen that, in the analyzes made, both by the presented method and by ETABS the maximum IDR was occurred on the 8th floor level.
The maximum error in the results obtained by the Equivalent Static Loads Method was %8.74.
The comparisons of the maximum displacement and the maximum IDR results of two method obtained by the Response Spectrum Analysis were given in Table 16.
The maximum error in the results obtained by the Response Equivalent Static Loads Method was %9.16. Maximum IDR was occurred on the 8th floor level by the analysis made by the presented method and by ETABS.
6 Conclusions
In this study, a method to determine the maximum displacement and the maximum interstory drift ratios by using tables has been proposed for the static and dynamic analysis of regular reinforced structures. By the method results of the analyses easily and quickly achieved. It has been observed that the Presented Method gave sufficient results with the Finite Element Method considering the examples that were solved at the end of the study. The approximation of the method is due to the approximation of the determination of the shear stiffness equation and the approximation of the axial deformations. Consequently, the proposed method can be used during the preliminary stage. Also, the method gives an idea about the behavior of the structure.
References
Chitty L (1947) On the cantilever composed of a number of parallel beams interconnected by cross bars. Philos Mag Londn Ser 7(38):685–699
Rosman R (1964) Approximate analysis of shear walls subject to lateral loads. Proc Am Concrete Inst 61(6):717–734
Rutenberg A, Heidebrecht AC (1975) Approximate analysis of asymmetric wall-frame structures. Build Sci 10(1):731–745
Murashev V, Sigalov E, Baikov VN (1976) Design of reinforced concrete structures. Mir Publishers, Moscow
Basu AK, Nagpal AK, Kaul S (1984) Charts for seismic design of frame-wall systems. J Struct Eng ASCE 110(1):31–46
Smith BS, Crowe E (1986) Estimating periods of vibration of tall building. J Struct Div ASCE 112(5):1005–1019
Smith BS, Yoon YS (1991) Estimating seismic base shears of tall wall-frame buildings. J Struct Eng ASCE 117(10):3026–3041
Mancini E, Savassi W (1999) Tall building structures unified plane panels behavior. Struct Des Tall Build 8:155–170
Ng SC, Kuang JS (2000) Triply coupled vibration of asymmetric wall–frame structures. J Struct Eng ASCE 126(8):982–987
Wang Y, Arnaouti C, Guo S (2000) A simple approximate formulation for the first two frequencies of asymmetric wall–frame multi-storey building structures. J Sound Vib 236(1):141–160
Swaddiwudhipong S, Lee SL, Zhou Q (2001) Effect of axial deformation on vibra-tion of tall buildings. Struct Des Tall Build 10:79–91
Zalka KA (2001) Simplified method for calculation of the natural frequencies of wall–frame buildings. Eng Struct 23(12):1544–1555
Hoenderkamp JCD (2002) Simplified analysis of asymmetric high-rise structures with cores. Struct Des Tall Build 11(2):93–107
Miranda E, Reyes CJ (2002) Approximate lateral drift demands in multistory buildings with nonuniform stiffness. J Struct Eng ASCE 128(7):840–849
Tarján G, László PK (2004) Approximate analysis of building structures with identical stories subjected to earthquakes. Int J Solids Struct 41(5–6):1411–1433
Miranda E, Akkar SD (2006) Generalized interstory drift spectrum. J Struct Eng ASCE 132(6):840–852
Clive LD, Harry EW (2007) Estimating fundamental frequencies of tall buildings. J Struct Eng ASCE 133(10):1479–1483
Georgoussis GK (2007) Approximate analysis of symmetrical structures consisting of different types of bents. Struct Des Tall Spec Build 16(3):231–247
Meftah SA, Tounsi A, El Abbas AB (2007) A simplified approach for seismic calculation of a tall building braced by shear walls and thin-walled open section structures. J Eng Struct 29(10):2576–2585
Laier JE (2008) An improved continuous medium technique for structural frame analysis. Struct Design Tall Spec Build 17(1):25–38
Rafezy R, Howson WP (2008) Vibration analysis of doubly asymmetric, three-dimensional structures comprising wall and frame assemblies with variable cross-section. J Sound Vib 318(1–2):247–266
Bozdogan KB (2009) An approximate method for static and dynamic analyses of symmetric wall-frame buildings. Struct Design Tall Spec Build 18(3):279–290
Takabatake H (2010) Two-dimensional rod theory for approximate analysis of building structures. Earthq Struct 1(1):1–19
Bozdogan KB (2011) A method for lateral static and dynamic analyses of wall-frame buildings using one dimensional finite element. Sci Res Essays 6(3):616–626
Wdowicki J, Wdowicka E (2012) Analysis of shear wall structures of variable cross section. Struct Des Tall Spec Build 21(1):1–15
Son HJ, Park J, Kim H, Lee HY, Kim DJ (2017) Generalized finite element analysis of high-rise wall-frame structural systems. Eng Comput 34(1):189–210
Stafford, Smith B, Kuster M, Hoenderkainp CD (1984) Generalized method for estimating drift in high-rise structures. J Struct Eng ASCE 110(7):1549–1562
Heidebrecht AC, Rutenberg A (2000) Applications of drift spectra in seismic design. In: Proceedings of 12WCEE, Auckland, NZ, New Zealand Society for Earthquake Engineering, Paper No. 209
Gülkan P, Akkar S (2002) A simple replacement for the drift spectrum. Eng Struct 24(11):1477–1484
Xie J, Wen Z (2008) A measure of drift demand for earthquake ground motions based on Timoshenko beam mode. In: The 14th world conference on earthquake engineering, Beijing, China
Khaloo AR, Khosravi H (2008) Multi-mode response of shear and flexural buildings to pulse-type ground motions in near-field earthquakes. J Earthq Eng 12(4):616–630
Yang D, Pan J, Li G (2010) Interstory drift ratio of building structures subjected to near-fault ground motions based on generalized drift spectral analysis. Soil Dyn Earthq Eng 30(11):1182–1197
Fardipour M, Lumantarna E, Lam N, Wilson J, Gad E (2011) Drift demand predictions in low to moderate seismicity regions. Aust J Struct Eng 15(3):195–206
Shodja AH, Rofooei FR (2014) Using a lumped mass, nonuniform stiffness beam model to obtain the interstory drift spectra. J Struct Eng ASCE 140(5)
Tekeli H, Atimtay E, Turkmen M (2015) An approximation method for design applications related to sway in RC framed buildings. Int J Civil Eng Trans A: Civil Eng 13(3):321–330
Chopra AK (2015) Dynamics of structures: theory and applications to earthquake engineering. Prentice Hall, Englewood Cliffs
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this paper

Cite this paper
Bozdogan, K.B., Ozturk, D. (2023). A Hand Method for Assessment of Maximum IDR and Displacement of RC Buildings. In: Wang, S., Li, J., Hu, K., Bao, X. (eds) Proceedings of the 2nd International Conference on Innovative Solutions in Hydropower Engineering and Civil Engineering. HECE 2022. Lecture Notes in Civil Engineering, vol 235. Springer, Singapore. https://doi.org/10.1007/978-981-99-1748-8_2
Download citation
DOI: https://doi.org/10.1007/978-981-99-1748-8_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-1747-1
Online ISBN: 978-981-99-1748-8
eBook Packages: EngineeringEngineering (R0)