
Abstract
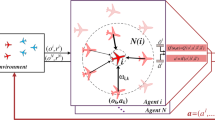
Aiming at the problem that the average mechanism in the current UAV swarm interaction process is not timely enough to respond to the individual emergency response, a neighbor set interaction model based on soft attention mechanism is proposed. The neighbor set is updated according to the self information content contained in the neighbor, so as to improve the response to the individual emergency operation in the swarm, which is conducive to the realization of obstacle avoidance, turning and other functions of the swarm. On the other hand, the task is decoupled from the swarm control, and a swarm control method based on the virtual long machine mechanism is established. The virtual long machine is added to the UAV neighbor swarm, and the movement of the UAV swarm is controlled through the interaction between the UAV and the neighbor.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Liu, M., et al.: Progress of theoretical modelling and empirical studies on collective motion. Chin. Sci. Bull. 59(25), 2464–2483 (2014)
Nikolai, B., Daniel, F., Jamie, W.: Leading from the front? Social networks in navigating groups. Behav. Ecol. Sociobiol. 66(6), 835–843 (2012)
Ashish, V., et al.: Attention is all you need. arXiv preprint arXiv: 1706.03762 (2017)
Ping, S., Xu, D.H., Yong, J.Z.: Object detection based on deep learning and attention mechanism. Comput. Eng. Appl. 55(17), 180–184 (2019)
Ling, L., et al.: Long text classification combined with attention mechanism. J. Comput. Appl. 38(5), 1272–1277 (2018)
Xu, C., et al.: Object tracking algorithm based on temporal-spatial attention mechanism. Comput. Sci. 48(4), 123–129 (2021)
Zhang, Z., Yang, F.: Self-supervised object tracking based on multi-attention mechanism. Comput. Eng. Des. 42(12) (2021)
Vicsek, T., et al.: Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 75(6) (1995)
Olfati, S.R., Murray, R.: Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 49(9), 1520–1533 (2004)
Juan, S., Jian, Z.Y., Xiu, J.Z.: Research on multi-agent swarm control based on improved Olfati saber algorithm. Inf. Commun. 5, 25–26 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Xue, L., Chen, X., Zhang, N. (2023). UAV Swarm Control Algorithm Based on Soft Attention Mechanism. In: Yan, L., Duan, H., Deng, Y. (eds) Advances in Guidance, Navigation and Control. ICGNC 2022. Lecture Notes in Electrical Engineering, vol 845. Springer, Singapore. https://doi.org/10.1007/978-981-19-6613-2_703
Download citation
DOI: https://doi.org/10.1007/978-981-19-6613-2_703
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6612-5
Online ISBN: 978-981-19-6613-2
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)