
Abstract
In recent years, the development of electric vehicles has boosted the autonomous vehicle technology. The electric vehicle can be controlled with precision and ease by manipulating the input current to the motor. This feature is highly valued in autonomous vehicle since precise control is required during critical maneuvering. However, heavy load tends to affect the performance of the electric vehicle. During a sharp turn or cornering the vehicle tends to experience load transfer. This causes the vehicle to experience extra load on one side of the vehicle compared to the other. Addition of load on either side will further increase the stress on the motor causing the vehicle to experience instability. This instability can be an unidentified external disturbance to the autonomous vehicle control. Thus, this paper is designed to uncover the effect of unbalanced overloading on steering of electric vehicle during tight cornering. Firstly, a simulation model on two in-wheel electric vehicle is developed. The analysis of the electric vehicle steering is conducted using the developed simulation model. Based on the result, increasing load on the side corresponding to the direction of the lateral motion causes the vehicle to experience oversteer. For instance, as the load on the right side of the vehicle is increased by 60%, the vehicle loses control and start skidding. On the other hand, increasing load on the left side causes the vehicle to experience understeer. This can affect the reliability of the controller in an autonomous vehicle since this external disturbance can be large at higher velocity.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

Abbreviations
- \(m_{t}\) :
-
Total mass of the vehicle
- \(h_{{cg}}\) :
-
Height of the centre of gravity of the vehicle from the ground
- \({\ddot{\text{x}}}\) :
-
Longitudinal acceleration
- \(C_{{\alpha f}}\) :
-
Front tire cornering stiffness
- \(C_{{\alpha r}}\) :
-
Rear tire cornering stiffness
- \(C_{\sigma }\) :
-
Longitudinal tire stiffness
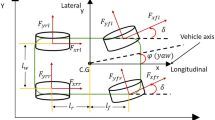
- \(F_{{xij}}\) :
-
Longitudinal force with i = front/rear and j = left/right
- \(F_{{yij}}\) :
-
Lateral force with i = front/rear and j = left/right
- \(I_{z}\) :
-
Yaw moment of inertia
- \(F_{{zij}}\) :
-
Vertical force acting on each tire with i = front/rear and j = right/left
- \(l_{f}\) :
-
Length of the front wheels from the centre of gravity
- \(load_{{ij}}\) :
-
Additional load at each wheel with i = front/rear and j = right/left
- \(l_{r}\) :
-
Length of rear wheel from the centre of the gravity
- \(l_{w}\) :
-
Track width
- \(m_{{sij}}\) :
-
Static mass at each wheel with i = front/rear and j = left/right
- \(\ddot{y}\) :
-
Lateral acceleration
- \(\ddot{\varphi }\) :
-
Yaw acceleration
- \(\text{k }\) :
-
Road constant
- \(g\) :
-
Gravitational acceleration
- \(l\) :
-
Sum of \(l_{f}\) and \(l_{r}\)
- \(\alpha\) :
-
Tire slip angle
- \(\delta\) :
-
Wheel steering angle
References
Fujimoto, H., Fujii, K., Takahashi, N.: Traction and yaw-rate control of electric vehicle with slip-ratio and cornering stiffness estimation. Proc. Am. Control Conf. 1, 5742–5747 (2007). https://doi.org/10.1109/ACC.2007.4282864
Wang, Y., Wang, Z., Zhang, L., Liu, M., Zhu, J.: Lateral stability enhancement based on a novel sliding mode prediction control for a four-wheel-independently actuated electric vehicle. IET Intell. Transp. Syst. 13(1), 124–133 (2019). https://doi.org/10.1049/iet-its.2017.0407
Qi, Z., et al.: 4-wheel independent in-wheel-motor drive and independ-ent steering electric vehicle safety analysis method based on mass re-distribution experiment. In: ICARA 2015 - Proceedings of the 2015 6th International Conference on Automation, Robotics and Applica-tions, pp. 22–27 (2015). https://doi.org/10.1109/ICARA.2015.7081120
Li, Z., Qi, Z., Dong, Z., Deng, Z., Ren, S.: An optimal control design of independent suspension based on adams for a four in-wheel-motor drive electric vehicle, In: 2012 19th International Conference on Mech-atronics and Machine Vision in Practice M2VIP 2012, pp. 517–520 (2012)
Ikhsan, N., Abdullah, A.S., Ramli, R.: The effect of gross vehicle weight on the stability of heavy vehicle during cornering. Int. J. Mech. Mechatron. Eng. 9(7), 1235–1240 (2015)
Kunjunni, B., Zakaria, M.A.B., Majeed, A.P.P., A. Nasir, A.F., Peeie, M.H.B., Abdul Hamid, U.Z.: Effect of load distribution on longitudinal and lateral forces acting on each wheel of a compact electric vehicle. SN Appl. Sci. 2(2), 1–8 (2020). https://doi.org/10.1007/978-981-13-8323-6_20
Baarath, K., Zakaria, M.A., Nasir, A.F.A., Hamid, U.Z.A.: Effect of road profile on normal force generated on electric vehicle. RITA 2020, 237–248 (2018)
Baarath, K., Zakaria, M.A., Bin Peeie, M.H., Hamid, U.Z.A., Nasir, A.F.A.: An investigation on the effect of lateral motion on normal forces acting on each tires for nonholonomic electric vehicle: experimental results validation. In: Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A. (eds.) IAVSD 2019. LNME, pp. 1643–1650. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-38077-9_187
Ishak, M.I., Ogino, H., Yamamoto, Y.: Numerical simulation analysis of an oversteer in-wheel small electric vehicle integrated with four-wheel drive and independent steering. Int. J. Veh. Technol. 2016, 1–12 (2016). https://doi.org/10.1155/2016/7235471
Peeie, M.H.B., Ogino, H., Oshinoya, Y.: Skid control of a small electric vehicle with two in-wheel motors: simulation model of ABS and regenerative brake control. Int. J. Crashworthiness 21(5), 396–406 (2016). https://doi.org/10.1080/13588265.2016.1147731
Acknowledgement
The authors would like to thank the Ministry of Higher Education for providing financial support under Fundamental Research Grant Scheme (FRGS) No. FRGS/1/2018/TK08/UMP/02/1 (University reference RDU190104) and Universiti Malaysia Pahang for laboratory facilities as well as additional financial support under Internal Research grant RDU1903139 and RDU1803139.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kunjunni, B., Zakaria, M.A.b., Peeie, M.H.B., Ishak, M.I. (2021). An Investigation on the Effect of Unbalanced Overloading on Compact Electric Vehicle Steering During Tight Cornering. In: Chew, E., et al. RiTA 2020. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-16-4803-8_30
Download citation
DOI: https://doi.org/10.1007/978-981-16-4803-8_30
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-4802-1
Online ISBN: 978-981-16-4803-8
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)