
Abstract
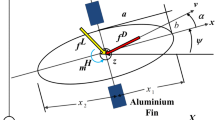
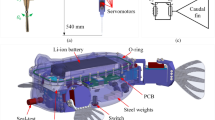
The swimming motion of a fish-like body with two undulating side fins similar to a ray and a squid is investigated through model experiments and flow computation around the body. Two models were constructed and experiments were conducted. One model consists of a big strut and two drive units for port and starboard sides above the water surface. The drive unit part is composed of one motor and 15 scotch yokes that drive the 15 bones of the side fin through the vertical push rods in the strut. By using it, the free-run tests with floating bodies and hydrodynamic force measurements were carried out. The other model has 16 servomotor units for both sides of the model. Each servomotor is controlled separately by a remote computer to make any kind of motion of the fin. Some preliminary tests were conducted for the latter model.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Barett DS, Triantafyllou MS (1995) The design of a flexible hull undersea vehicle propelled by an oscillating foil. Proc 9th Int Symp on Unmanned Untethered Submersible Technology, pp 111–123
Barrett DS, Triantafyllou MS, Yue DKP, Grosenbaugh MA, Wolfgang MJ (1999) Drag reduction in fish-like locomotion. J Fluid Mech 392: 183–212
ISABMEC(2000) Proceedings of First International Symposium on Aqua Bio-Mechanisms and International Seminar on Aqua Bio-Mechanisms, Honolulu, Hawaii, USA
Kamoda.H, Sasaki, T., Suzuki, T. and Toda, Y.(2003) A study on three-dimensional velocimetry using three color sheets, Journal of Japan visualization society, Vol.23, SUPPL. No.l(in Japanese)
Kato N (1999) Hydrodynamic characteristics of mechanical pectoral fin. ASME J Fluids Eng 121: 605–613
Kato N (2000) Control performance of fish robot with mechanical pectoral fins inhorizontal plane. IEEE J Oceanic Eng 25(1): 121–129
Nagai, M.(1999) Hydrodynamics studied from the dolphin“, Ohmsha.(in Japanese)
Tanaka, I. and Nagai,M.(1996) Hydrodynamics of resistance and promotion-studied for the high-speed swimming performance of aquatic animal-, Ship and Ocean foundation.(in Japanese)
Toda, Y., Hieda, S. and Sugiguchi, T.(2002A) Laminar flow computation around a plate with two undulating side fins, Journal of Kansai Society of Naval Architects, Japan, No.237,(in Japanese),pp71–78
Toda, Y., Fukui, K. and Sugiguchi, T.(2002B) Fundamental study on propulsion of a fish-like body with two undulating side, Proc. of ASIA PACIFIC WORKSHOP ON MARINE HYDRODYNAMICS, Kobe, Japan,pp227–232
Triantafyllou MS, Triantafyllou GS, Yue DKP (2000) Hydrodynamics of fishlike swimming. Annual Review of Fluid Mechanics 32: 33–53
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2004 Springer Japan
About this paper
Cite this paper
Toda, Y., Suzuki, T., Uto, S., Tanaka, N. (2004). Fundamental Study of a Fishlike Body with Two Undulating Side-Fins. In: Kato, N., Ayers, J., Morikawa, H. (eds) Bio-mechanisms of Swimming and Flying. Springer, Tokyo. https://doi.org/10.1007/978-4-431-53951-3_8
Download citation
DOI: https://doi.org/10.1007/978-4-431-53951-3_8
Publisher Name: Springer, Tokyo
Print ISBN: 978-4-431-67963-9
Online ISBN: 978-4-431-53951-3
eBook Packages: Springer Book Archive