
Abstract
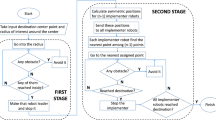
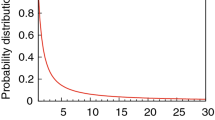
As a distributed system, swarm robotics is well suited for multiple targets search tasks. In this paper, a new approach based on triangle formation and random search is proposed for high efficiency, demonstrating excellent abilities of exploration and exploitation in experiments. In addition, a new random walk strategy of linear ballistic motion, integrated with triangle estimation, is put forward as a comparison algorithm, the performance of which can serve as a benchmark.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Tan, Y.: A Survey on Swarm Robotics. In: Li, J. (ed.) Handbook of Research on Design, Control, and Modeling of Swarm Robotics, 1. IGI Global, Hershey (2015)
Şahin, E.: Swarm robotics: from sources of inspiration to domains of application. In: Şahin, E., Spears, W.M. (eds.) Swarm Robotics 2004. LNCS, vol. 3342, pp. 10–20. Springer, Heidelberg (2005)
Li, J., Tan, Y.: The multi-target search problem with environmental restrictions in swarm robotics. In: 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 2685–2690. IEEE, December 2014
Gazi, V., Passino, K.M.: Stability analysis of social foraging swarms. IEEE Trans. Syst. Man Cybern. Part B Cybern. 34(1), 539–557 (2004)
Krishnanand, K.N., Ghose, D.: A glowworm swarm optimization based multi-robot system for signal source localization. In: Liu, D., Wang, L., Tan, K.C. (eds.) Design and Control of Intelligent Robotic Systems. SCI, vol. 177, pp. 49–68. Springer, Heidelberg (2009)
Couceiro, M.S., Rocha, R.P., Ferreira, N.M.: A novel multi-robot exploration approach based on particle swarm optimization algorithms. In: 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 327–332. IEEE, November 2011
Zheng, Z., Tan, Y.: Group explosion strategy for searching multiple targets using swarm robotic. In: 2013 IEEE Congress on Evolutionary Computation (CEC), pp. 821–828. IEEE, June 2013
Zheng, Z., Li, J., Li, J., Tan, Y.: Improved group explosion strategy for searching multiple targets using swarm robotics. In: 2014 IEEE International Conference on Systems, Man and Cybernetics (SMC), pp. 246–251. IEEE, October 2014
Tan, Y., Zhu, Y.: Fireworks algorithm for optimization. In: Tan, Y., Shi, Y., Tan, K.C. (eds.) ICSI 2010, Part I. LNCS, vol. 6145, pp. 355–364. Springer, Heidelberg (2010)
Zheng, Z., Li, J., Li, J., Tan, Y.: Avoiding decoys in multiple targets searching problems using swarm robotics. In: 2014 IEEE Congress on Evolutionary Computation (CEC), pp. 784–791. IEEE, July 2014
Shlesinger, M.F.: Mathematical physics: search research. Nature 443(7109), 281–282 (2006)
Viswanathan, G.M., Buldyrev, S.V., Havlin, S., Da Luz, M.G.E., Raposo, E.P., Stanley, H.E.: Optimizing the success of random searches. Nature 401(6756), 911–914 (1999)
Bartumeus, F., Raposo, E.P., Viswanathan, G.M., da Luz, M.G.: Stochastic optimal foraging theory. In: Lewis, M.A., Maini, P.K., Petrovskii, S.V. (eds.) Dispersal, Individual Movement and Spatial Ecology. LNM, vol. 2071, pp. 3–32. Springer, Berlin, Heidelberg (2013)
Balch, T., Arkin, R.C.: Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 14(6), 926–939 (1998)
Amory, A., Meyer, B., Osterloh, C., Tosik, T., Maehle, E.: Towards fault-tolerant and energy-efficient swarms of underwater robots. In: 2013 IEEE 27th International Parallel and Distributed Processing Symposium Workshops and Ph.D. Forum (IPDPSW), pp. 1550–1553. IEEE, May 2013
Acknowledgements
This work was supported by the Natural Science Foundation of China (NSFC) under grant no. 61375119 and Supported by Beijing Natural Science Foundation (4162029), and partially supported by National Key Basic Research Development Plan (973 Plan) Project of China under grant no. 2015CB352302.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Li, J., Tan, Y. (2016). Triangle Formation Based Multiple Targets Search Using a Swarm of Robots. In: Tan, Y., Shi, Y., Li, L. (eds) Advances in Swarm Intelligence. ICSI 2016. Lecture Notes in Computer Science(), vol 9713. Springer, Cham. https://doi.org/10.1007/978-3-319-41009-8_59
Download citation
DOI: https://doi.org/10.1007/978-3-319-41009-8_59
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-41008-1
Online ISBN: 978-3-319-41009-8
eBook Packages: Computer ScienceComputer Science (R0)