
Abstract
A three-neighbor triangular partitioned cellular automaton (TPCA) is a CA whose cell is triangular-shaped and divided into three parts. The next state of a cell is determined by the three adjacent parts of its neighbor cells. The framework of TPCA makes it easy to design reversible triangular CAs. Among them, isotropic 8-state (i.e., each part has two states) TPCAs, which are called elementary TPCAs (ETPCAs), are extremely simple, since each of their local transition functions is described by only four local rules. In this paper, we investigate a specific reversible ETPCA \(T_{0347}\), where 0347 is its identification number in the class of 256 ETPCAs. In spite of the simplicity of the local function and the constraint of reversibility, evolutions of configurations in \(T_{0347}\) have very rich varieties, and look like those in the Game-of-Life CA to some extent. In particular, a “glider” and “glider guns” exist in \(T_{0347}\). Furthermore, using gliders to represent signals, we can implement universal reversible logic gates in it. By this, computational universality of \(T_{0347}\) is derived.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


1 Introduction
A three-neighbor triangular cellular automaton (TCA) is a one whose cell is regarded as being triangular-shaped, and communicates with its three neighbor cells. Here, we use the framework of triangular partitioned cellular automata (TPCAs) [6], where each cell is divided into three parts, and each part has its own state set. TPCAs are a subclass of TCAs where the state set of a cell is the Cartesian product of the sets of the three parts. In a TPCA, the next state of a cell is determined depending only on the three adjacent parts of the neighbor cells (not depending on the states of the whole three neighbor cells). Such a framework is useful for designing reversible TCAs.
We define an elementary TPCA (ETPCA) as a TPCA such that each part of a cell has only two states (hence a cell has eight states), and its local transition function is isotropic (i.e., rotation-symmetric). There are 256 ETPCAs in total, and there are 36 reversible ETPCAs (RETPCAs). ETPCAs are extremely simple, since each of their local functions is described by only four local rules. But, they still show interesting behavior as in the case of one-dimensional elementary cellular automata (ECAs) [13, 14]. In [6], it is shown that the RETPCA with the identification number 0157 (explained later) is computationally universal.
In this paper, we investigate a specific RETPCA \(T_{0347}\) having the identification number 0347. It somewhat resembles Game-of-Life CA [2, 4, 5], and exhibits interesting behavior. In particular, there exist a glider and glider guns. The glider in \(T_{0347}\) is a moving object with period 6. There are glider guns that generate gliders in three directions as well as in one direction. There is also a gun that generates gliders to the negative time direction. We can compose right-turn, U-turn, and left-turn modules out of stable blocks, which can change the moving direction of a glider. It is also possible to change the direction of a glider by colliding another glider appropriately. Based on these basic operations, we can implement gate modules that simulate reversible logic gates in the cellular space of \(T_{0347}\). By this, computational universality of \(T_{0347}\) is concluded.
2 Elementary Triangular Partitioned Cellular Automata
In this section, we give definitions on elementary triangular partitioned cellular automata (ETPCAs), their reversibility, and some related notions.
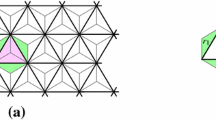
A partitioned cellular automaton (PCA) is a subclass of a standard CA, where a cell is divided into several parts, and each part has its own state set. The next state of a cell is determined by the states of the adjacent parts of the neighboring cells. Figure 1 shows the case of a two-dimensional three-neighbor triangular PCA (TPCA). A local function of a TPCA is specified by a set of local rules of the form shown in Fig. 1 (b). Applying it to all the cells in parallel, a global function, which gives a transition relation among configurations, is obtained. Hereafter, we consider only deterministic PCAs.
We say a PCA is locally reversible if its local function is injective, and globally reversible if its global function is injective. It is known that global reversibility and local reversibility are equivalent (Lemma 1). Thus, such a PCA is simply called a reversible PCA (RPCA). Note that, in [11], the lemma is given for one-dimensional PCAs, but it is easy to extend it for two-dimensional PCAs.
Lemma 1
[11] A PCA A is globally reversible iff it is locally reversible.
By this lemma, to obtain a reversible CA, it is sufficient to give a locally reversible PCA. Thus, the framework of PCA makes it easy to design reversible CAs.

A three-neighbor triangular PCA. (a) Its cellular space, and (b) a local rule.
A TPCA is called isotropic (or rotation-symmetric), if, for each local rule, the rules obtained by rotating the both sides of it by a multiple of \(60^{\circ }\) exist. Note that, if a TPCA is isotropic, then all three parts of a cell must have the same state set. In the following, we study only isotropic TPCAs.
An 8-state isotropic TPCA is called an elementary TPCA (ETPCA). Thus, each part of a cell has the state set \(\{0,1\}\). ETPCAs are the simplest ones among two-dimensional PCAs. But, this class still contains many interesting PCAs as in the case of one-dimensional elementary CAs (ECAs) [13, 14].
Since ETPCA is isotropic, and each part of a cell has only two states, its local function is defined by only four local rules. Hence, an ETPCA can be specified by a four-digit number wxyz such that \(w,z \in \{0,7\}\) and \(x,y \in \{0,1,\ldots ,7\}\) as shown in Fig. 2. Thus, there are 256 ETPCAs. Note that w and z must be 0 or 7 because ETPCAs are isotropic and deterministic. The ETPCA with the identification number wxyz is denoted by \(T_{wxyz}\).

Representing an ETPCA by a four-digit number wxyz, where \(w,z \in \{0,7\}\) and \(x,y \in \{0,1,\ldots ,7\}\). The states 0 and 1 are represented by a blank and \(\large \bullet \), respectively. Vertical bars indicate alternatives of a right-hand side of a rule.
A reversible ETPCA is denoted by RETPCA. It is easy to see the following.
Let \(T_{wxyz}\) be an ETPCA. We say \(T_{wxyz}\) is conservative (or bit-conserving), if the total number of particles (i.e., \(\large \bullet \)’s) is conserved in each rule. Thus, the following holds. Note that, if an ETPCA is conservative, then it is reversible.
3 RETPCA \(T_{0347}\) and Its Properties
Here, we focus on a specific RETPCA \(T_{0347}\), and investigate its properties. Its local function is given in Fig. 3. It is a non-conservative RETPCA. We shall see that there are many patterns (i.e., segments of configurations) that show interesting behavior as in the case of Game-of-Life CA [2, 4, 5]. In Sect. 4, some of them will be used to construct reversible logic gates in \(T_{0347}\). In [10], evolving processes of various configurations of \(T_{0347}\) can be seen by movies.

Local function of the non-conservative RETPCA \(T_{0347}\)
3.1 Glider, Block, Fin, and Rotator in \(T_{0347}\)
The most useful object in \(T_{0347}\) is a glider (Fig. 4). It swims in the cellular space like a fish (or an eel). It travels a unit distance, the side-length of a triangle, in 6 steps. By rotating it appropriately, it can move in any of the six directions.

Movement of a glider. The glider patterns at time \(t=0,\ldots ,5\), and 6 are said to be of phase \(0,\ldots ,5\), and 0, respectively.

Blocks of (a) type I and (b) type II. They are stable patterns.
A block is an object shown in Fig. 5 (a) or (b). It does not change its pattern if no other object touches it. In this sense, it is a stable pattern. There are two kinds of blocks, i.e., type I (Fig. 5 (a)) and type II (Fig. 5 (b)). As explained in Subsect. 3.2, an appropriate type of a block must be used when colliding a glider with it. Combining several blocks, right-turn, U-turn, and left-turn of a glider will be implemented.
A fin is an object that simply rotates as in Fig. 6 with period 6. It can also travel around a block (Fig. 7), or a sequence of blocks (Fig. 8) clockwise.
A rotator is an object shown in Fig. 9. Like a fin, it rotates around some point, and its period is 42.

A fin that rotates around the point indicated by 

A fin can travel around a block clockwise. It takes 42 steps to return to the initial position. Note that the block changes its pattern transiently, but it becomes the initial pattern again at \(t=14\).

A fin travelling along a sequence of blocks

A rotator that moves around the point indicated by  . Its period is 42.
. Its period is 42.

Colliding a glider with a type I block. It works as a backward-turn module.

If we collide a glider moving eastward with a type II block, garbage remains
3.2 Changing the Move Direction of a Glider by Blocks
We now make several experiments of colliding a glider with blocks. First, we collide a glider with a single block. We put a glider that moves eastward, and a block of type I as shown in Fig. 10 (\(t=0\)). At \(t=12\) they collide. Then, the glider is split into a body (i.e., a rotator) and a fin, and the body begins to rotate around the point indicated by  (\(t=16\)). The fin travels around the block (\(t=38\)). When it comes back to the original position, it interacts with the body (\(t=50\)). By this, the rotation center of the body is shifted upward by two cells, and the fin travels around the block once more (\(t=61\)). At \(t=94\), the body and the fin meet again to reconstruct a glider. Finally, the glider goes westward (\(t=97\)). By above, backward-turn of the glider is realized.
(\(t=16\)). The fin travels around the block (\(t=38\)). When it comes back to the original position, it interacts with the body (\(t=50\)). By this, the rotation center of the body is shifted upward by two cells, and the fin travels around the block once more (\(t=61\)). At \(t=94\), the body and the fin meet again to reconstruct a glider. Finally, the glider goes westward (\(t=97\)). By above, backward-turn of the glider is realized.
In the above process, if we use a type II block instead of a type I block, then the glider goes to the north-east direction, but the block cannot be re-used, since some garbage remains (Fig. 11). Therefore, an appropriate type of block should be used depending on the coming direction of the glider. Figure 12 shows the allowed input positions of a glider in each type of a block.

Allowed input positions for (a) the type I block, and (b) the type II block

\(120^{\circ }\)-right-turn module composed of two blocks

Right-turn module composed of three blocks

Right-turn module composed of five blocks, which are not linearly placed
Next, we collide a glider with two blocks (Fig. 13). As in the case of one block (Fig. 10), the glider is split into a rotator and a fin (\(t=56\)). The fin travels around the blocks three times without interacting with the rotator. At the end of the fourth round, they meet to form a glider, which goes to the south-west direction (\(t=334\)). Hence, two blocks act as a right-turn module.
Figures 14 and 15 show that three blocks and five blocks also act as right-turn modules. They have shorter delays than the case of two blocks. Note that, as in Fig. 15, blocks need not be placed in a straight line. Namely, the sequence of blocks can be bent slightly. But, if we do so, an appropriate type of a block must be used at each position. Otherwise, blocks will be destroyed.
If we collide a glider with a sequence of four, six, or seven blocks, then they will be destroyed. On the other hand, a sequence of eight blocks acts as a backward-turn module like one block, and that of nine blocks acts as a right-turn module like two blocks. Generally, a sequence of \(n+7\) blocks (\(n > 0\)) shows a similar behavior as that of n blocks though the total delay is longer. The reason is as follows. The period that the fin goes around the \(n+7\) blocks is \(36(n+7)+6\). Thus, when the fin comes back, the phase of the rotator becomes the same as in the case of n blocks, since the period of a rotator is 42, and \(36 \times 7\) is a multiple of 42.
A U-turn module is given in Fig. 16. Also in this case, the glider is first split into a rotator and a fin (\(t=36\)). But, slightly before the fin comes back to the start position, it meets the rotator, and a glider is reconstructed, which moves westward (\(t=113\)). Note that, here the output path is different from the input path, while in the backward-turn module they are the same (Fig. 10).

U-turn module

\(120^{\circ }\)-left-turn module

\(60^{\circ }\)-right-turn module composed of four blocks

Interface between a bidirectional signal path, and unidirectional signal paths
Figure 17 shows a left-turn module. It is more sophisticated than the right-turn and U-turn modules. The glider is split into a rotator and a fin as before. The fin first travels outside of the module, and then inside. But, around the middle of the module it meets the rotator. A glider is reconstructed from them, and it moves to the north-west direction (\(t=366\)).
It is also possible to make a \(60^{\circ }\)-right-turn module as in Fig. 18. First, the input glider makes \(120^{\circ }\)-right-turn by the three blocks (\(t=250\)). Next, the glider is reflected by the left-side block. Finally, it makes \(120^{\circ }\)-right-turn again by the three blocks (\(t=585\)). This mechanism is also used as an interface between a bidirectional signal path and unidirectional signal paths as shown in Fig. 19.
Table 1 shows the net delay d (i.e., the additional delay caused by the module) and the phase shift s of each turn module. Here, the relation \(s = (-d) \bmod 6\) holds. In the case of Fig. 13, we can regard the travelling distance of the glider from \(t=0\) to 334 is 5. Since the speed of a glider is 1 / 6, \(d = 334-5/(1/6) = 304\). Combining these turn modules, we can control the moving direction of a glider freely. It is also possible to shift the phase of a glider. For example, by making right-turn (\(120^{\circ }\)) and then left-turn (\(120^{\circ }\)), its phase is shifted by 2.
3.3 Glider Guns in \(T_{0347}\)
A glider gun is a pattern that generates gliders periodically as the one in Game-of-Life [5]. In the RETPCA \(T_{0347}\), it is very easy to create a three-way glider gun. As shown in Fig. 20, it is obtained by colliding a glider with a fin.
Interestingly, there is a glider absorber in \(T_{0347}\) (Fig. 21). It absorbs three gliders every 24 steps, and finally produces a fin and a glider. It is considered as a “backward glider gun” that generates gliders to the negative time direction.

Three-way glider gun. It generates three gliders every 24 steps.

Glider absorber. It is considered as a glider gun to the negative time direction.

Generating three gliders by the head-on collision of two gliders
There is another way of composing a glider gun. Figure 22 shows that three gliders are generated by the head-on collision of two gliders. Based on this mechanism, we can design a one-way glider gun as shown in Fig. 23, where two of the three generated gliders are re-used to generate the next three.

One-way glider gun. It generates a glider every 1422 steps.
4 \(T_{0347}\) is Computationally Universal
In this section, we show Turing universality of \(T_{0347}\), i.e., any Turing machine can be simulated in it.

(a) Switch gate. (b) Inverse switch gate, where \(c=y_1\) and \(x=y_2 + y_3\) under the assumption \((y_2 \rightarrow y_1)\wedge (y_3 \rightarrow \overline{y_1})\). (c) Fredkin gate.
4.1 Showing Turing Universality of Reversible CA
To prove Turing universality of a reversible CA, it is sufficient to show that any reversible logic circuit composed of switch gates (Fig. 24 (a)), inverse switch gates (Fig. 24 (b)), and delay elements can be simulated in it (Lemma 6).
Lemma 6 can be derived, e.g., in the following way. First, a Fredkin gate (Fig. 24 (c)) can be constructed out of switch gates and inverse switch gates (Lemma 2). Second, any reversible sequential machine (RSM), in particular, a rotary element (RE), which is a 2-state 4-symbol RSM, is composed only of Fredkin gates and delay elements (Lemma 3). Third, any reversible Turing machine is constructed out of REs (Lemma 4). Finally, any (irreversible) Turing machine is simulated by a reversible one (Lemma 5). Thus, Lemma 6 follows. Note that the circuit that realizes a reversible Turing machine constructed by this method becomes an infinite (but ultimately periodic) circuit.
Lemma 2
[3] A Fredkin gate can be simulated by a circuit composed of switch gates and inverse switch gates, which produces no garbage signals.
Lemma 3
[8] Any RSM (in particular RE) can be simulated by a circuit composed of Fredkin gates and delay elements, which produces no garbage signals.
Lemma 4
[9] Any reversible Turing machine can be simulated by a garbage-less circuit composed only of REs.
Lemma 5
[1] Any (irreversible) Turing machine can be simulated by a garbage-less reversible Turing machine.
Lemma 6
A reversible CA is Turing universal, if any circuit composed of switch gates, inverse switch gates, and delay elements is simulated in it.
So far, Turing universality of several reversible two-dimensional CAs has been shown in this way. They are the 2-state reversible block CA model by Margolus [7], the two models of 16-state reversible PCAs on square grid by Morita and Ueno [12], and the conservative RETPCA \(T_{0157}\) by Imai and Morita [6].
4.2 Making Switch Gate and Inverse Switch Gate Modules in \(T_{0347}\)
We show a switch gate and an inverse switch gate can be implemented in \(T_{0347}\) using gliders as signals. The operation of a switch gate is realized by colliding two gliders as shown in Fig. 25. It is important that, in this collision, the glider from the input port c travels to the south-east direction with no delay even though it interacts with the glider from x (hence its phase is not shifted also).

Switch gate operation realized by collision of two gliders
Here, we implement a switch gate as a “gate module” in the standard form. Otherwise, adjustment of signal timing, in particular, adjustment of the phase of a glider becomes very cumbersome when designing a larger circuit. A gate module is a pattern embedded in a rectangular-like region in the cellular space that satisfies the following (Fig. 26): (1) It realizes a reversible logic gate. (2) Input ports are at the left end. (3) Output ports are at the right end. (4) Delay between input and output is constant and a multiple of 6. Figure 27 shows a switch gate module. The delay in this module is 2232 steps.

Gate module in the standard form

Switch gate module implemented in \(T_{0347}\)

Inverse switch gate module implemented in \(T_{0347}\)
An inverse switch gate module is implemented in a similar manner as shown in Fig. 28. It is a “quasi-mirror-image” of the switch gate module. The positions of the blocks are just the mirror images of those in the switch gate. But, each block is replaced by the other type of the corresponding block (not by the mirror image of the block). The delay between input and output is also 2232 steps.
If we use only \(120^{\circ }\)-right-turn modules (Table 1) to connect gate modules, then there is no need of adjusting the phases of gliders. This is because the phase shift becomes 0, if we make \(120^{\circ }\)-right-turns three times. In this way, we can construct a larger circuit easily. Thus, we have the following theorem.
Theorem 1
The RETPCA \(T_{0347}\) with infinite (but ultimately periodic) configurations is Turing universal.
5 Concluding Remarks
Among 256 ETPCAs, we studied a specific reversible ETPCA \(T_{0347}\). In spite of its extreme simplicity of the local function and the constraint of reversibility, \(T_{0347}\) shows interesting behavior. Here, a glider plays the key role in \(T_{0347}\). By placing blocks appropriately, trajectory and the phase of a glider can be completely controlled. Logical operation is also performed by interacting gliders. In this way, Turing universality of \(T_{0347}\) with infinite configurations was proved.
On the other hand, it is an open problem whether there is a universal constructor in \(T_{0347}\), which can build any pattern in some specified class of patterns (e.g., the class of all patterns consisting of blocks). It is also not known whether universal systems (such as reversible Turing machines, reversible counter machines, or some others) are simulated in the finite configurations of \(T_{0347}\).
Besides \(T_{0347}\), it has already been shown that the conservative RETPCA \(T_{0157}\) with infinite configurations is Turing universal [6], where a single particle rather than a glider is used to represent a signal. It is left for the future study to find other ETPCAs that are universal.
References
Bennett, C.H.: Logical reversibility of computation. IBM J. Res. Dev. 17, 525–532 (1973)
Berlekamp, E., Conway, J., Guy, R.: Winning Ways for Your Mathematical Plays, vol. 2. Academic Press, New York (1982)
Fredkin, E., Toffoli, T.: Conservative logic. Int. J. Theoret. Phys. 21, 219–253 (1982)
Gardner, M.: Mathematical games: The fantastic combinations of John Conway’s new solitaire game “life”. Sci. Am. 223(4), 120–123 (1970)
Gardner, M.: Mathematical games: On cellular automata, self-reproduction, the Garden of Eden and the game “life”. Sci. Am. 224(2), 112–117 (1971)
Imai, K., Morita, K.: A computation-universal two-dimensional 8-state triangular reversible cellular automaton. Theoret. Comput. Sci. 231, 181–191 (2000)
Margolus, N.: Physics-like model of computation. Physica D 10, 81–95 (1984)
Morita, K.: A simple construction method of a reversible finite automaton out of Fredkin gates, and its related problem. Trans. IEICE Japan E–73, 978–984 (1990)
Morita, K.: A simple universal logic element and cellular automata for reversible computing. In: Margenstern, M., Rogozhin, Y. (eds.) MCU 2001. LNCS, vol. 2055, pp. 102–113. Springer, Heidelberg (2001)
Morita, K.: A reversible elementary triangular partitioned cellular automaton that exhibits complex behavior (slides with simulation movies). Hiroshima University Institutional Repository (2016). http://ir.lib.hiroshima-u.ac.jp/00039321
Morita, K., Harao, M.: Computation universality of one-dimensional reversible (injective) cellular automata. Trans. IEICE Japan E72, 758–762 (1989)
Morita, K., Ueno, S.: Computation-universal models of two-dimensional 16-state reversible cellular automata. IEICE Trans. Inf. Syst. E75–D, 141–147 (1992)
Wolfram, S.: Theory and Applications of Cellular Automata. World Scientific Publishing, Singapore (1986)
Wolfram, S.: A New Kind of Science. Wolfram Media Inc, Champaign (2002)
Acknowledgement
This work was supported by JSPS KAKENHI Grant Number 15K00019.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 IFIP International Federation for Information Processing
About this paper
Cite this paper
Morita, K. (2016). An 8-State Simple Reversible Triangular Cellular Automaton that Exhibits Complex Behavior. In: Cook, M., Neary, T. (eds) Cellular Automata and Discrete Complex Systems. AUTOMATA 2016. Lecture Notes in Computer Science(), vol 9664. Springer, Cham. https://doi.org/10.1007/978-3-319-39300-1_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-39300-1_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39299-8
Online ISBN: 978-3-319-39300-1
eBook Packages: Computer ScienceComputer Science (R0)