
Abstract
Offshore wind provides an important source of renewable energy and new opportunities for marine technology. Various fixed and floating concepts have been proposed for offshore wind application. Offshore wind turbines (OWTs) with a monopile support structure fixed to the sea bed in shallow water, have already been industrialized, while fixed turbines in deeper water are emerging. Floating wind turbines are still at an early stage of development. The works presented in this chapter deal with selected recent developments of wind turbine concepts, design criteria and methods for integrated dynamic analysis. Besides design, topics such as inspection, monitoring, maintenance and repair during operation are also briefly addressed.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
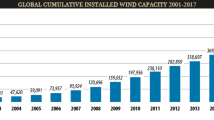
An increased focus on renewable energy is needed in view of the climate challenges. Globally, there is a significant potential for offshore wind energy. Wind power is produced offshore by wind turbines that consist of a rotor, a drivetrain and an electric generator, supported on a tower and a bottom fixed or floating structure. The rotor can have a horizontal or vertical axis. While the horizontal axis turbines currently dominate the commercial market, vertical axis turbines provide advantages that especially could reduce the costs of floating turbines. The drivetrain is commonly a mechanical transmission with a gear but a hydraulic transmission or direct drive is also an alternative. For traditional wind turbines with gear transmissions, the gearbox is among the most expensive components.
Up until now, fixed foundations, such as monopile, gravity-base and tripod, are used in offshore wind farms in relatively shallow waters, i.e. 10–30 m depths. Jacket-type wind turbines have been installed in water depths up to 45 m and will play an important role in the near-future development. In deeper water, beyond 80 m, it may be more cost work effective to exploit wind resource by using floating wind turbines. This is because the foundation cost of a fixed wind turbine will increase significantly when the water depth increases, while the cost of a floater is less sensitive to the water depth.
The development of floating wind turbines is still at an early stage and further studies are required to demonstrate which of the concepts is the best one for certain site conditions, such as water depth and met ocean conditions. This not only requires due considerations of the support structure, but also of the rotor and drivetrain as wind turbines are tightly coupled systems where the different subsystems interact.
Fixed bottom wind turbines are usually designed as a de-coupled system. Hydrodynamic loads in deep water or intermediate water depth where wave profiles are not too steep, are well described by linear wave theory. As wave height increases and water depth decreases, the wave crest tends to become more narrow and steep, whereas the wave trough becomes long and flat. This happens as the wave starts to ‘sense’ the bottom. The nonlinearity of a wave increases with the wave steepness. Weakly non-linear undisturbed waves are in general well understood and for regular waves higher order perturbation solutions exist. Near the point of breaking, waves become highly nonlinear, and at the point of breaking release a high amount of energy; such events can have a significant impact on the loading on offshore wind turbines.
Spar-type floating wind turbines are suited for deep water due to their draft; Statoil plans to install five 6 MW spar turbines in 100 m water depth in Scotland.
So far semi-submersible wind turbines have been based on three columns connected by braces. Typically they are designed to support one central turbine or 1–3 turbines located on the top of columns. Clearly, if more than one turbines are installed on one platform, a weather-vaning mooring system will be needed to reduce the aerodynamic wake inter-action between them.
Alternative designs without braces have also been proposed. Current single 5 MW turbine concepts show a large scatter of displacement—between 4500 and 14,000 tons.
Tension-leg concepts normally require a displacement larger than a semi-submersible to ensure the necessary pretension of the tendons and hence the performance that implies limited heave, pitch and roll motions. The main challenge in tension-leg design is to satisfy the ‘no slack’ and limited maximum tension criteria for the tendons with a minimum displacement.
2 Research Activities in the MARE-WINT Project
Two types of large floating wind turbines are feasible for offshore applications—floating horizontal axis wind turbines (HAWTs) and floating vertical axis wind turbines (VAWTs). VAWTs have the potential to reduce the cost of energy, compared to HAWTs. Chapter 12 thus deals with the integrated modeling and dynamic response analysis of typical floating VAWT concepts. A fully coupled aero-hydro-servo-elastic method is presented for numerical modeling and dynamic response analysis of floating wind turbine systems. In addition, comparative studies of floating HAWTs and VAWTs are performed.
Chapter 13 deals with hydrodynamic loads on a tripod substructure in relatively shallow water. It provides a brief review of existing analytical and empirical formulations and presents results of a numerical study, considering weak non-linear waves. Open-source codes were used in the simulation of breaking wave, with a focus on impulse forces.
The last chapter in this part (Chap. 14) deals with the use of condition monitoring (CM) and structural health monitoring (SHM) on the turbine tower. SHM allows early detection of damage and aids with maintenance planning, which reduces the cost. The SHM needs to be low cost, suitable for continuous measurement, insensitive to measurement noise, loading conditions and the ambient condition changes. While most efforts on CM and SHM of wind turbines are focused on the drivetrain, and to some extent on the blades, the purpose of this work has been to investigate the applicability of SHM for the tower.
In Chap. 14, a novel SHM technique, using the change in the location of the tower’s Neutral Axis (NA) as a damage sensitive feature, is proposed. The method uses the Kalman Filter for the estimation of the NA location based on the measured strains along two mutually perpendicular axes. A decision based data fusion technique then allows the isolation of the damage. The use of NA as a damage sensitive feature allows the methodology to be insensitive to the ambient loading conditions, while the use of Kalman Filter allows temperature compensation and the robustness to the presence of measurement noise. The study has been carried out on the simulated finite element (FE) model of the wind turbine tower and indicates that bi-axial NA tracking based on data fusion is indeed necessary and at the same time is sensitive to damage. The proposed methodology is then validated using real strain data from the Nordtank NTK 500/41 wind turbine. Based on the results presented, it is concluded that a change in NA is indeed a robust damage indicator insensitive to ambient condition changes, and the applied loads.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is distributed under the terms of the Creative Commons Attribution-NonCommercial 4.0 International License (http://creativecommons.org/licenses/by-nc/4.0/), which permits any noncommercial use, duplication, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the work’s Creative Commons license, unless indicated otherwise in the credit line; if such material is not included in the work’s Creative Commons license and the respective action is not permitted by statutory regulation, users will need to obtain permission from the license holder to duplicate, adapt or reproduce the material.
Copyright information
© 2016 The Author(s)
About this chapter
Cite this chapter
Moan, T., Bugalski, T. (2016). An Overview of Analysis and Design of Offshore Wind Turbines. In: Ostachowicz, W., McGugan, M., Schröder-Hinrichs, JU., Luczak, M. (eds) MARE-WINT. Springer, Cham. https://doi.org/10.1007/978-3-319-39095-6_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-39095-6_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-39094-9
Online ISBN: 978-3-319-39095-6
eBook Packages: EnergyEnergy (R0)