
Abstract
This research focuses on improving elderly drivers’ acceptability for proactive collision avoidance systems by passive information sharing with drivers. In this paper, visual contents by concentric circles for informing risky areas and ones by dot line for informing predicted path of surrounding traffic participants were proposed as the prototypes for sharing situation comprehensions of the intelligent vehicle. The evaluation experiment with a driving simulator revealed the effectiveness of the proposed visual contents for improving acceptability and the further challenges relating to the mental models of functions of intelligent vehicles.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In Japan, recent traffic accidents caused by elderly drivers are one of big issues. Since elderly drivers’ physical and cognitive abilities are declined by aging, their risk of causing traffic accidents and their mortality rate are higher than those of young drivers. Thus, advanced safety technologies focusing on their features are required. For these problems, our collaborators [1] proposed vehicle control algorithms for driving assistance systems including partially automated driving. Distinguishing characteristic of the systems is a proactive intervention that intelligent vehicles intervene drivers’ operations more early and softly than existing ones. Although such proactive systems could compensate decreased abilities of elderly drivers, they have potential problems to make drivers to feel anxieties because of the proactive characteristics. Indeed, our previous research [2] revealed problems of not being accepted and pointed out the necessities of HMIs for sharing information. For these problems, this research aimed to develop information sharing systems based on situation comprehensions of intelligent vehicles.
2 Design of Information Sharing System Based on Situation Comprehensions of Intelligent Vehicles
2.1 System Concept
Figure 1 shows the conceptual schematic of driving intervention by intelligent vehicles. This system assumes drivers’ operations in usual safe situations and intelligent vehicle’s interventions during approach to the risky situations. Examples of the target situations are as follows.

Conceptual schematic of driving intervention by intelligent vehicle
-
Longitudinal control: Deceleration before passing through the blind spots due to parked cars, narrow alleys and so on.
-
Lateral control: Avoidance of the parked car without approaching closely.
In these situations, elderly drivers sometimes can not conduct defensive driving appropriately and fall into more dangerous situations. Although existing emergent intervention systems have the possibilities of avoiding collisions, such emergent systems have risks of resulting in damages to the weak body of the elderly due to the large deceleration. Therefore, early and soft interventions by the intelligent vehicles are necessary. For realizing soft intervention, this research focuses on the proactive avoidance: based on the comprehensions of the surrounding traffic environments, the vehicle’s intelligence starts the interventions to the driving with keeping enough proximities to avoiding targets earlier than existing ones.
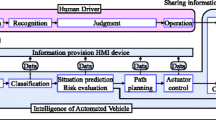
As shown in the schematic of driving intervention, drivers’ operations are not reflected to the vehicle control during interventions. In this situation, since drivers’ basic functions from perception to operation do not always harmonize with parallel functions of the vehicle’s intelligence from sensing to actuator control, acceptability for such systems sometimes decreases due to various conflicts [2]. For these problems, our research group proposed information sharing systems [3, 4]. Figure 2 shows the conceptual schematic of them. Since this research assumes Head-Up-Displays as the HMI device for information provision, the systems provide various kinds of visual contents based on the data of each function of the intelligent vehicle in order to prevent conflicts between the human driver and the intelligence of the automated vehicle. Although existing collision avoidance systems provide some kinds of information, the purpose of information provision and the characteristics of provision style are different from information sharing systems proposed in this research. Figure 3 shows the conceptual schematic of time series chart of existing collision avoidance systems while Fig. 4 shows that of information sharing systems. Compared to existing ones, information sharing systems start to provide simultaneously various kinds of information at the early phase of system’s intervention. In addition, although existing ones provide alerts for the purpose of promoting the appropriate actions of the drivers, information sharing systems provide various kinds of information not for promoting driver’s appropriate actions but for helping the driver to grasp the states of the intelligent vehicle.

Conceptual schematic of information sharing between human driver and vehicle’s intelligence. Vehicle’s intelligence sends data of each function to the HMI device for information provision. The HMI device provides the human driver with visual contents. Since provided contents are obtained not by the processes of recognition, judgment and operation but by the process of perception, vertical arrow dot-lines represent not the routes of information process but the targets of provided information.

Conceptual schematic of time series chart of existing systems for emergent collision avoidances. At first, the system activates the alert for warning drivers. Then, the system starts to assist driver’s operation. When the situations become critical, the system starts to avoid collision automatically with indicating the system activation.

Conceptual schematic of time series chart of proactive vehicle intervention system with information sharing. Before the situations become critical, the system starts to intervene the driver’s operations. At the same time, HMIs start to provide various kinds of information for sharing states of various functions of the intelligent vehicle.
2.2 Previous Approaches
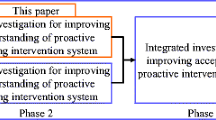
Our previous researches developed the prototypes of information sharing systems that provides drivers with results of classification and path planning [3, 4]. Figures 5, 6, 7 and 8 show examples of the visual contents for our prototypes. Figure 5 shows the example of visual contents for sharing what the vehicle detects and classifies. Figure 6 shows the example of visual contents for sharing the planed path of vehicle’s locomotion. Figures 7 and 8 show the example of visual contents for sharing states of vehicle’s control. Sharing these information could help drivers to grasp the states of some functions of the intelligent vehicle; further, it could improve acceptability of the drivers. As a result of evaluation experiments with a driving simulator, the effectiveness of information sharing for improving acceptability were verified. However, although the information could tell the targets of avoidance and plans of locomotion, it could not perfectly tell the reason why the system started the intervention so early and kept enough proximities. In other words, elderly drivers felt annoyed for excessively safe interventions from the subjective viewpoints of them. However, their subjective feelings to a safe driving are not always appropriate because of their aging. Thus, they are needed to understand such functional characteristics of the system for utilizing the proactive safety systems. Since handling this unsolved problem would have the possibility of improving acceptability much more, this research focused on the information sharing of the remaining functions: situation comprehensions as shown in Fig. 9.

Visual contents for sharing what the vehicle considers as dangerous [3]. Red rectangles indicates the objects which the intelligent vehicle considers as dangerous. A red sign of pedestrians above the truck indicates potential dangers of pedestrian’s running out (Color figure online).

Visual contents for sharing the planed path of vehicle’s locomotion [4]

Visual contents for sharing the state of automated deceleration [3]. A red inverse triangle indicates the deceleration sign in Japan. Red bars beside the inverse triangle indicate the remaining time of deceleration and shorten according to the time (Color figure online).

Visual contents for sharing the state of automated avoidance [4]. Yellow signs on the bottom right corner indicate the activation of automated steering. Red bars beside the yellow sings indicate the remaining time of deceleration and shorten according to the time (Color figure online).

Target topic in this research
2.3 Visual Contents for Sharing Situation Comprehensions
Although vehicle’s intelligence understands surrounding situations by various cues, proactive vehicle controls use two kinds of important information: risk evaluation of surrounding situations and locomotion predictions of surrounding traffic participants. Thus, by using metaphors of such information, this research developed visual contents for sharing information as the prototypes implemented in the driving simulator. Figures 10 and 11 show the examples of visual contents for informing risky areas on each situation. Since some of proactive control algorithms [1] use mathematical potential calculations, these contents expresses concentric circles as risky areas by following the metaphor of mathematical potential. On the contrary, Figs. 12 and 13 show the examples for informing predicted paths of surrounding traffic participants on each situation. For both provision styles, visual contents were colored yellow and blinked slowly in order to prevent false recognition of the drivers.

Visual contents by concentric circles for risky areas in proactive braking situations

Visual contents by concentric circles for risky areas in proactive steering situations

Visual contents by dot line for predicted path in proactive braking situations

Visual contents by dot line for predicted path in proactive steering situations
3 Evaluation Experiment
Following protocols were approved by the School of Engineering the University of Tokyo IRB for human studies.
3.1 Experimental Methods
In this experiment, information sharing during activation of the proactive intervention was reproduced by a driving simulator. Experimental participants were 12 elderly drivers (65 to 75-years-old, M = 70, SD = 3) who were healthy and driving a car usually. Figure 14 shows the appearance of the driving simulator. This simulator has following equipments.

Driving simulator
-
Three front screens of which Field-Of-View is approximately 120° from the position of driver’s seat.
-
Stewart platform which reproduces motion cues. The scale factor of motion cue was set to 0.1 for the purpose of reproducing the initial feeling of the motion.
-
Steering wheel with a servo motor which reproduces the reactive torque.
3.2 Experimental Scenarios
Figure 15 shows the schematic of the evaluation scenario for proactive braking. In this scenario, the intelligent vehicle detects the blind spot due to the parked car and predicts the possibility of pedestrian’s running out. Based on the prediction, the intelligent vehicle starts to decelerate when Time-To-Collision becomes 5.0 s or less. The initial velocity on this situation was 40 km/h and the rate of deceleration was approximately 1.0 m/s2.

Schematic of evaluation scenario for proactive braking
Figure 16 shows the schematic of evaluation scenario for proactive steering. In this scenario, the intelligent vehicle detects a parked car and a cyclist, and predicts the cyclist’s lane change. Based on the prediction, the intelligent vehicle starts to steer when Time-To-Collision becomes 5.0 s or less. The initial velocity on this situation was 30 km/h.

Schematic of evaluation scenario for proactive steering
Every single trip consisted of four times of above-mentioned situations. No visual contents were provided during the 1st and 3rd situations while visual contents were provided during 2nd and 4th situations. In addition, only one kind of visual contents was provided on every trip. For all situations in every single trip, same vehicle controls were reproduced regardless of information provision. These sequences aimed to make participants conscious about the basic state without information sharing and to decrease the order effects.
3.3 Investigation Methods
Experimental participants evaluated each visual content after they experienced. Focused points of evaluation were how much they accepted the system and what kinds of functions they subjectively considered that the system had. For the 1st point, they were asked by 9-grades questionnaires and the sentences of the questionnaires were as follows.
-
Questionnaire for proactive intervention system without information provision: “How much do you want to adopt this system to your car?”
-
Questionnaire for proactive intervention system with information provision: “On the condition that this system always provides information, how much do you want to adopt this system to your car?”
On the answer sheet, Japanese sentences equivalent to following ones were noted alongside some of grade points for the reference.
-
Grade 9: I want to adopt it very much
-
Grade 7: I want to adopt it a little.
-
Grade 5: No opinion.
-
Grade 3: I do not want to adopt it so much.
-
Grade 1: I do not want to adopt it at all.
On the other hand, for the 2nd point, they were asked by multiple selection questionnaires. The questionnaire sentences were as follows.
-
A. Automated functions of avoiding objects and pedestrians.
-
B. Functions of detecting potentially collision objects.
-
C. Automated driving functions instead of the driver.
-
D. Safety functions for preventing traffic accidents.
-
E. Alert functions for dangers on the road.
-
F. Prediction functions of future situations based on surrounding traffic environment.
-
G. Alert functions for dangerous driving of the driver.
-
H. Safety functions for preventing the vehicle from approaching risky situations.
-
I. Advisory functions of the desired style of driving to the driver.
-
J. Support functions of driving without feeling tiredness.
Participants checked each questionnaire if they felt that the system had the function described by a questionnaire. Although some of above-mentioned sentences are true for the proposed system, main focuses in this research were whether the visual contents as shown in Figs. 10, 11, 12 and 13 could tell the existence and meaning of functions described in sentences F and H. These functions are the distinguish characteristics of proactive safety systems that intervenes earlier that existing ones.
3.4 Results
Figure 17 shows the evaluation results of acceptability for proactive braking on each condition of information provision. On the other hand, Fig. 18 shows the evaluation results for proactive steering. For both results, larger values indicates better evaluations. Although worst evaluation result goes worse a little on the condition of information provision about locomotion prediction for proactive braking, 2nd quartile values of acceptability are generally improved due to provision of information.

Evaluation results of acceptability for proactive braking

Evaluation results of acceptability for proactive steering
Table 1 shows the number of the answers for multiple selection questionnaires. Although main purpose of visual contents in this research were telling the existence and meaning of functions relating to questionnaires F and H, the numbers of “yes” for these questionnaires are relatively small. On the contrary, the numbers of “yes” for questionnaires A, B and E are relatively large. These results indicates that even visual contents proposed in this research could not perfectly tell the characteristics of the proactive controls similarly to our previous researches [3, 4].
3.5 Discussions
Although the information provisions by the visual contents were effective for improving acceptability for the proactive intervention systems, they could not perfectly tell the characteristics of the proactive systems that the system intervenes earlier than existing ones for the purpose of not approaching to the risky situations. Instead, they considered received information as something for alert systems and indicators of activating automated interventions. This seems to be caused by lacks of mental models for intelligent vehicles and their functions. If so, educations for the concept of the proactive systems have the possibilities of improvement on the understanding of the characteristics of the proactive intervention systems: further; it has the possibilities of improving the acceptability much more.
4 Conclusions
This research focused on the elderly drivers’ acceptability for automated driving assistance systems; further, this research designed visual contents of HMIs for sharing information of intelligent vehicle’s comprehensions. Based on the system architecture of the vehicle’s intelligence, this research proposed two kinds of prototypes of visual contents: visual contents by concentric circles for informing risky areas and ones by dot line for informing predicted path of surrounding traffic participants. Then, this research conducted evaluation experiment by using driving simulators. The results were as follows.
-
Proposed visual contents could improve the acceptability of the elderly drivers for the proactive intervention systems.
-
Proposed visual contents could not perfectly tell the proactive characteristics.
Further improvement of the acceptability due to the enhancement of mental models which will be formed by the education for the proactive intervention systems, are the next step of this research.
References
Hasegawa, T., Raksincharoensak, P., Nagai, M.: Risk-potential based motion planning and control of proactive driving intelligence system for enhancing active safety. In: Proceedings of AVEC (2014)
Shino, T., Ito, T., Kamata, M.: Acceptability of proactive collision avoidance for elderly drivers. In: Proceedings of AVEC (2014)
Ito, T., Shino, T., Kamata, M.: Effectiveness of passive information sharing for elderly drivers from the viewpoint of acceptability for proactive braking assistance. In: Proceedings of JSAE Annual Congress 2014 Autumn (2014) (in Japanese)
Shino, T., Ito, T., Kamata, M.: Effectiveness of passive information sharing for elderly drivers from the viewpoint of acceptability for proactive steering assistance. In: Proceedings of JSAE Annual Congress 2014 Autumn (2014) (in Japanese)
Acknowledgement
This research has been conducted as a part of the research project “Autonomous Driving System to Enhance Safe and Secured Traffic Society for Elderly Drivers” granted by Japan Science and Technology Agency(JST), Strategic Innovation Creation Promotion Program.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Ito, T., Shino, T., Kamata, M. (2015). Information Sharing System Based on Situation Comprehensions of Intelligent Vehicles to Improve Drivers’ Acceptability for Proactive ADAS. In: Yamamoto, S. (eds) Human Interface and the Management of Information. Information and Knowledge in Context. HIMI 2015. Lecture Notes in Computer Science(), vol 9173. Springer, Cham. https://doi.org/10.1007/978-3-319-20618-9_20
Download citation
DOI: https://doi.org/10.1007/978-3-319-20618-9_20
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-20617-2
Online ISBN: 978-3-319-20618-9
eBook Packages: Computer ScienceComputer Science (R0)