
Abstract
Multi-agent simulations (MAS) have been used to study the dynamics of social systems. Disaster-related simulation is one of application fields. The simulation is applied to scenarios that are difficult to perform drills in the real world. The results provide useful data such as the amount of time people take to evacuate buildings and how smoothly rescue responders arrive at target points in the buildings. Making use of the simulation results to plan disaster-prevention measure, we need to verify that the simulation results that are reasonable at scenarios that are not confirmed from real data and observations. In this paper, we discuss the standardization process of MAS-based evacuation simulations by examining qualitative differences perceived in our evacuation simulations.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Disasters may occur anytime and anywhere in the world. Disaster prevention methods are planned and drills are conducted to check disaster-related social systems involving damage assessment, response measurement, and evacuation guidance because these help save lives during emergencies. These drills are used to estimate the required safe egress time (RSET) and improve prevention plans for emergency situations. Students at schools and occupants of buildings are encouraged to participate in such drills. However, it is difficult to conduct drills that involve a large number of people in real-world environments, such as the scenario that occurred on September 11, 2001, at the World Trade Center (WTC) buildings in New York City [1].
We learn how people behaved during disasters from media stories and reports published by those in authority. Their actions involve the following general phenomena: they begin evacuation based on their individual circumstances; they communicate with each other and share information about the emergency; people in the vicinity of the area where the emergency occurred adjust their actions according to the shared information. These phenomena reflect features of collective behavior in emergency situations. The simulation of these phenomena includes modeling individual emotions, interactions between humans, and characterizing the behavior of groups of people in a crowd. The simulation system that consists of these components provides a solution to a possible emergency. However, nobody can validate the results of the simulations or guarantee how the system would really work during an emergency.
We believe that evacuation simulation systems can be used not only to estimate the time taken for evacuation but also to check how smoothly rescue responders reach their targets at emergency sites. In this paper, we discuss qualitative standards of validating simulations result that are hard to be checked with experiments in the real world. Section 21.2 describes related works and background scenarios. Section 21.3 shows our evacuation simulations as an example of disaster-related social systems. Conditions of validating simulations qualitatively are discussed in Sect. 21.4. Section 21.5 provides a descriptive summary.
2 Related Works
The National Institute of Standards and Technology (NIST) published reports on the WTC egress of September 11, 2001. The report describes the evacuation of Towers 1 and 2, and offers an explanation for the variation in the time taken for evacuation of the two towers despite their layout, size, and number of occupants being almost the same. The NIST report includes a description taken from a simulation of occupant evacuations during the WTC disaster and highlighted several concerns that future simulation systems should address.
The social psychological factors involved in human behavior are related to the validation of crowd simulation models. A substantial amount of data on pedestrian dynamics was presented at the Pedestrian and Evacuation Dynamics conference [2]. Zhang et al. conducted experiments on human bidirectional flows at the laboratory level [3]. Helbing’s empirical social forces model simulated interactions among people and resultant behaviors such as the arch-like blocking of an exit and faster-is-slower effect [4]. The results of crowd simulations using these models have been validated with real world data.
Pelechnao et al. proposed a HiDAC model that enables high-density crowd simulation in dynamically changing environments [5]. Their model is based on Helbing’s work and is composed of geometrical information and psychological rules with a force model resembling behaviors of real people. Durupinar et al. extend the HiDAC model by specifying agents personalities in order to mimic human behaviors from normal and disaster environments [6]. Guy et al. use Eysenck’s three-personality model for crowd simulation and show how personality affects the social behavior of crowds, including faster-in-slow effect [7]. Okaya et al. proposed an information-transfer and sharing model during evacuation and demonstrated how guidance methods can improve evacuation time [8]. While the simulations including human person factors make the simulations more realistic ones, the human related factors and their behaviors pose a problem of validating the simulation results.
Validating the results of social simulations is critical to ensure that they are applicable to real-world cases. Especially, life-threatening applications require data from real-world situations to assure its usefulness [9]. The existing experimental measures often rely on ad-hoc applications, e.g., local crowd densities are measured to verify patterns of human movements in crowd. The conditions may differ from ones obtained from prior cases and experiments. The differences of conditions are such as at what times the simulation starts; daytime or night, and the intentions of people; they aim to the same place or have their own destinations. The conditions are also assumed to be well set as well as the model of social behaviors.
3 Agent Based Evacuation Behavior Simulation
Computer simulations allow to examine out-the-box scenarios that are hard to be experimented in the real world. Human evacuation behaviors are examples of such situations and agent based simulations can express the microscopic behaviors of humans. To show the features of human change simulation results, two evacuation simulations are demonstrated, one is the behavior of occupants starting to evacuate followed by an announcement broadcast through public address system (PA) and the other is the action of rescue responders during emergencies. TENDENKO that we have been developed is used to simulate two cases [8].
3.1 Evacuation Behaviors According to PA
3.1.1 Simulation Background
During emergencies, the authorities activate alarms or announce evacuation instructions to begin the evacuation. According to the GEJE report, only 40 % of evacuees heard the emergency alert warning given over the PA system [10].Footnote 1 Of those who heard the warning, 80 % recognized the urgent need for evacuation and the remaining 20 % did not understand the announcement owing to the noise and confusion. In case of the September 11 incident, messages were announced on a limited number of floors of the WTC buildings that were hit by planes. The messages had been pre-prepared for the types of accidents that prompted phased evacuation in advance, and unfortunately, these messages did not provide proper guidance to occupants of the buildings based on dynamically changing situations. Furthermore, some people on the impacted floors did not hear the announcement.
We believe three components, i.e.,—rate of transmission, content, and method—are explicitly embodied in communication during emergencies. The components used in the simulations are based on existing documents that have been reported in situations of past emergencies, and the behaviors of agents in the MAS are designed to perform similar actions as described in the documents.
3.1.2 Simulation Results
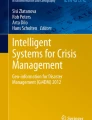
Figure 21.1 shows a snapshot of simulating evacuation of 1000 people (with 200 people on every floor) evacuating from a five-story building. This building is a library at our university and has stairs between floors and two exits. One is the main entrance, 3.7 m wide, on the second floor, and the other is an emergency exit on the first floor. Figure 21.2 shows the simulation results of four scenarios (Table 21.1). The simulations were run three times for each scenario. The averages of evacuation rates (percentages of evacuated agents in all agents) were plotted in simulation-time sequence. The first scenario is that the broadcast is heard by all and everyone evacuates instantly after the announcement. The other three scenarios differ from scenario 1 in terms of: the type of evacuees, contents of announcement, and timing of announcement, respectively. Simulations for scenarios 3 and 4 indicate a better evacuation rate than scenarios 1 and 2. Checking the locations of the agents shows that congestions occurred at stairwells in scenarios 1 and 2, and this leads to the low rates of evacuation and the big variations among the simulations.

Library facade (left) and image of agent behavior on the second floor (right)

Time change of evacuation rates for scenarios
3.2 Rescue Responders’ Action During Emergencies
3.2.1 Simulation Background
The arrival of first responders affects the end time of RSET. We need to check how smoothly rescue responders reach their targets during emergency situations. It is natural for people to swerve when they come close to colliding with one another. Survivors of the WTC attacks considered the counter flow of first responders as both evacuation support and obstacles to their exit.
Zhang’s experiment was the counter flow between two groups; the numbers of the groups and the types of agents in the groups are the same, and they compared the agents’ movement of their simulation with the experimental data [3]. People’s behaviors differ according to who is approached by whom. The mass behavior of pedestrians is thought to affect the arrival time of first responders. To our best knowledge, counter flow between agents and responders has not been tested in experiments.
3.2.2 Simulation Results
Figure 21.3 shows snapshots of a counter flow between agents and first responders with/ without a perception-driven model [11]. The model enables agent change their behaviors according to the social role of particular agents that is perceived by visual information; for example, agents step aside to help the coming responders go through, while they try to go when other agents approach them.

Counterflow movements between 10 rescue responders (blue) and 100 occupants. (Figures at the left show the initial position, which moves to the right as time proceeds.) (a) Without perception, (b) with perception
Agents on the left room move to the right room, and a team of 10 rescue responders enters from the right room into the left room. They pass each other in the corridor that connects the rooms together. The length and width of the corridor are 10 meters and 3 meters, respectively. Figure 21.3 (a) is a case of no perception-driven model that corresponds to bidirectional flow between agents, and (b) is a case of perception-driven model. By introducing a perception-driven model, the responders move to the other room faster with cooperative behavior from the agents.
Figure 21.4 shows snapshots of the other simulations in the library mentioned in Sect. 21.3.2. The scenario is that 1000 people evacuate from the library and five responders enter from the main entrance to help the injured inside. Figure 21.4a, b are the counter flow of agents and fire responders at the main entrance without and with the perception factor, respectively; they are snapshots at time step 40, 45 and 50 sequentially from left to right. The agents (sector mark on the top of light color body) evacuate from left to right and the responders (triangle sector on the top of black body) enter the library from the right. The marks on the agents’ heads indicate the direction of their movements. A responder is pointed with a white arrow. The responder remained at entrance at 50 time step in (a), while the responder entered and went to a directed site in the library in (b).

Counter flow between evacuees from the library and rescue responders entering from the right; snapshots are 40, 45 and 50 steps from left to right, one responder is pointed by filled left arrow. (a) Without perception (responders (black body) remain outside), (b) with perception (responders move inside against occupants (light color body))
The left column of Table 21.2 shows the number of agents who evacuated the library and the right column is number of responders who entered. From time steps 45 to 55 time steps, fewer agents evacuate in a simulation with perception-driven model than in the other simulation without the model. However, after all responders entered the building, there is no one who blocks the evacuation at the entrance obstructs the flow of evacuation; more agents successfully evacuate with-perception. This is an interesting finding and presents problems on how to estimate the simulation results and to make use of the finding in making prevention plans for emergencies.
4 Validation of ABS Results for Scenarios Containing Human Actions
4.1 Validation Problems in Conventional Social Systems
The two simulations provide useful results that contain practical information to building managers and rescue officers. However, following concern makes the managers pose to adopt the simulation results in their policymaking.
-
1.
Although the behaviors driven by perception-driven model seem to be similar to ones reported in the GEJE and WTC accidents and experimenting the counter-flow behavior at unexpected situations is hard to perform in the real world, the model are inadequately-supported from the real-world data so the simulations cannot be applied to other cases.
-
2.
The evacuation times of Towers 1 and 2 on September 11, 2001, varied despite the fact that their layout, size, and number of occupants were almost the same. This fact indicates that there are other factors that should be taken in consideration to explain the difference in evacuation times of Towers 1 and 2. PA is known to change the occupants’ actions, and evacuation announcement may be one factor.
The points to be used in the policy making are that the system should be well designed to present the behavior of targets, and the results are guaranteed to be reasonable ones for the scenarios even if they are applied to outside-the-box scenarios. The following points are hypothesized in modeling the social systems.
- H1:(whole-part relation):
-
A social system, Σ, may be composed of subsystems, S i. Every one has some knowledge on phenomena that social systems simulate. The knowledge is implemented in S i. They are modeled with a finite set of parameters, \(\varPi =\{ p_{1},p_{2},\ldots p_{n}\}\). The parameters, p i , represent features of agents, environments, interactions among them or others.
- H2:(causality of subsystem):
-
The procedure followed in the system is described by formulas or rules. In the case of a discrete-time dynamic system, it can be described as: \(\varSigma _{t+1} = F(\varSigma _{t},\varPi _{t})\).
- H3:(validness of subsystem):
-
When subsystems, S i, are well defined, then the system, Σ, may be well designed and expanding or refining parameters and functions cover more phenomena or make simulations consistent with experimental data or empirical rules.
Social systems involve various factors. These factors are also required to be well defined. Table 21.3 shows subsystems and parameters of evacuation simulations. The simulators in the NIST reports are characterized in physical properties of agents and TENDENKO focuses the representation of mental/social states and information distribution through communication domains based on existing documents [12]. With implementing human actions as agent behaviors, the evacuation simulations and its subsystems are mainly categorized into agent and environment. The parameters of agents are physical factors, mental status, sensing ability and actions of agents. Compared to the simulation systems listed in NIST report,
4.2 Qualitative Standard to Simulation Results for Social Scenarios
Nobody can validate the results of evacuation simulations for emergency situations that have not occurred and affirm that the planning based on the simulation results work well at a possible emergency situation. People evaluate the results of simulation from their personal perspectives. The perspectives may be outside of scopes that the social systems aim to simulate, even though they understand the model of simulation are based on the past cases and do not cover all characteristics of disasters.
In scientific and engineering fields, a principle: guess of model, compute consequence, and compare experiment, has been used to increase the fidelity of simulations [13]. It is difficult that evacuation simulation do follow the principle, because we cannot repeat evacuation drills that many people take part in at the same conditions of the simulations. We propose the following qualitative standards that are necessary to apply such simulations without real-world data:
- S1:(consistency with data):
-
Simulation results of Σ or its changes after changing parameters or modifying subsystems are compatible with the past anecdotal reports,
- S2:(generation of new findings):
-
The results involve something that are not recognized important before simulations, and that points are reasonable from empirical rule
- S3:(accountability of results):
-
The cause of the changes can be explainable from the simulation data systematically.
Table 21.4 shows relevance to the hypotheses in the design of simulation mentioned in Sect. 21.4.1.
The two TENDENKO’s simulations in the previous section demonstrate that the simulations with the same size of real environments help to reflect behaviors that would occur in a real situation. The simulations suggest possible solutions that can be used as an alternative of evacuation drills. The possibilities of two simulations are checked using the standards:
-
In the case of evacuation behaviors according to PA, Table 21.1 shows that scenarios 2, 3 and 4 differ from scenario 1 in one factor. Scenarios 3 and 4 correspond to phased evacuations that ease congestions through certain evacuation behaviors. The aforementioned three points are satisfied and additionally the advice corresponds to one of advices proposed in the GEJE report.
-
In the case of rescue responders’ action, S1 standard is satisfied. The perception-driven model makes the simulation real one; however, they do not give any findings to improve the rescue operations of responders. The results do not meet the other two standards S2 and S3.
5 Discussions and Summary
We believe that MAS-based evacuation systems can replace evacuation drills that guide people in real environments. During real disasters, people respond to directives and helpful information from authorities, fellow citizens, family, and friends. They behave differently in response to such information and their intentions. Evacuation simulations using various scenarios provide us, especially safety officer, with data for analyzing the qualitative differences of these scenarios.
In this paper, we propose standards to check whether the results of social simulations are effective or not by using two examples of simulations under various conditions. Both results seem to improve disaster prevention plans, however one is ranked as effective one and the other is not. We believe such qualitative standard on effectiveness of MAS is important to be widely used.
Notes
- 1.
The report was based on investigations conducted with 870 people who were from Iwata, Miyagi and Fukishima prefectures. The percentages were different for the three prefectures and the average values are listed in this paper.
References
Averill JD, Mileti DS, Peacock RD, Kuligowski ED, Groner NE (2005) Occupant behavior, egress, and emergency communications (NIST NCSTAR 1-7). Technical report. National Institute of Standards and Technology, Gaitherburg, MD
Peacock RD, Kuligowski ED, Averill JD (2011) Pedestrian and evacuaion dynamics. Springer, Berlin
Zhang J, Klingsch W, Schadschneider A, Seyfried A (2012) Ordering in bidirectional pedestrian flows and its influence on the fundamental diagram. J Stat Mech Theory Exp P02002. doi:10.1088/1742-5468/2012/00/P00000. arXiv:1107.5246 [physics.soc-ph]
Helbing D, Farkas I, Vicsek T (2000) Nature 407:487
Pelechano N, Allbeck JM, Badler NI (2007) Proceedings of the 2007 ACM SIGGRAPH/eurographics symposium on computer animation, SCA ’07. Eurographics Association, Aire-la-Ville, pp 99–108. http://www.portal.acm.org/citation.cfm?id=1272690.1272705
Durupinar F, Pelechano N, Allbeck J, Gudukbay U, Badler NI (2011) IEEE Comput Graph Appl 31(3):22. doi:10.1109/MCG.2009.105. http://www.dx.doi.org/10.1109/MCG.2009.105
Guy SJ, Kim S, Lin MC, Manocha D (2011) Eurographics/ACM SIGGRAPH symposium on computer animation, pp 43–52
Okaya M, Niwa T, Takahashi T (2014) The Autonomous agents and multiagent systems (AAMAS), pp 169–1670
Banerjee B, Kraemer L (2010) AAMAS2010, pp 1551–1552
C.O.G. of Japan Prevention disaster conference, the great West Japan earthquake and tsunami. Report on evacuation behavior of people (in Japanese). http://www.bousai.go.jp/kaigirep/chousakai/tohokukyokun/7/index.html. Accessed 21 Jan 2014
Okaya M, Takahashi T (2012) First International workshop on pattern recognition and crowd analysis
Kuligowski ED (2005) NIST SP 1032; workshop on building occupant movement during fire emergencies
Feynman RP (1967) The character of physical law. The MIT Press, Cambridge
Acknowledgement
This work was supported by JSPS KAKEN Grant Number 24500186.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This book is distributed under the terms of the Creative Commons Attribution Non-commercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Copyright information
© 2015 The Author(s)
About this paper
Cite this paper
Takahashi, T. (2015). Qualitative Methods of Validating Evacuation Behaviors. In: Takayasu, H., Ito, N., Noda, I., Takayasu, M. (eds) Proceedings of the International Conference on Social Modeling and Simulation, plus Econophysics Colloquium 2014. Springer Proceedings in Complexity. Springer, Cham. https://doi.org/10.1007/978-3-319-20591-5_21
Download citation
DOI: https://doi.org/10.1007/978-3-319-20591-5_21
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-20590-8
Online ISBN: 978-3-319-20591-5
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)