
Abstract
This work presents an algorithm to generate simple closed random triangular digital curves of finite length imposed on a background triangular grid. A novel timestamp-based combinatorial technique is incorporated to allow the curve to grow freely without intersecting itself. The algorithm runs in linear time as a fixed set of vertices are consulted to find the next direction and since it does not require backtracking. The proposed algorithm is implemented and tested exhaustively.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The problem of generating simple random polygon has attracted lot of researchers not only because of its theoretical interest but also for its application in many areas of computer science. Random polygon has two main areas of application, firstly in testing correctness of geometric and graph algorithms [2, 6, 7] and secondly evaluating efficiency, i.e., estimating consumption of CPU-Time of algorithms that operate on polygons. Sometimes, it is difficult to obtain a large set of practically relevant input data for an algorithm to run on, hence next best choice would be to run the algorithm on random input. To that end an algorithm that generates random polygon can supply random polygon as input to algorithms that expect polygons as input. Random curves may also be useful in graphical applications [4] which intends to generate textures of the nature: like clouds and landforms. In [1, 4, 5, 8, 10, 11] several works on generating random polygon and random curves have been reported. A heuristic approach for generation of simple polygons is presented in [8], which also presents several tests to verify the uniformity of random simple polygon generator. An approach for generating a random x-monotone polygon on a given set of vertices is reported by Zhu et al. [11]. Auer et al. [1] analyzed heuristics to generate simple and star-shaped polygons on a given set of points. Two methods for generating random orthogonal polygon with given set of vertices are presented in [10], one of them uses an inflate-cut technique, whereas the other employs a constraint programming approach and modelled the problem as constraint satisfaction problem. In most of these works, a polygon is generated from a random set of vertices. Two recent work on generating random digital closed curve (\(4\)- and \(8\)- connected) is presented in [3] and in [9]. However, to the best of our knowledge, there are no proposed algorithms to generate random closed curves in triangular grid.
A random curve is called triangular when it consists of edges which lie in either \(\mathbb {L}_0\) or \(\mathbb {L}_{60}\) or \(\mathbb {L}_{120}\) as defined in Definition 1. In this paper, a linear-time algorithm is proposed based on combinatorial technique devoid of any backtracking. The algorithm generates random simple triangular closed curve imposed on the background triangular grid where the resolution of the generated curve are controlled by varying the grid length. A move from a given grid point is chosen randomly from a set of ‘safe’ directions calculated on the basis of the occupancy and orientation of some designated neighbors of the current vertex. Two instances of random triangular curves generated by the proposed algorithm are shown in Fig. 1.
The paper is organized as follows. Required definitions are presented in Sect. 2. The basic principle behind formulation of the combinatorial rules for traversal is discussed in Sect. 3. The method for generation of random digital curves are presented in Sect. 4. Section 5 presents the experimental results with analysis and the conclusion is presented in Sect. 6.

Two instances of triangular digital random curves with grid length \(4\)
2 Definitions
Definition 1
(triangular grid). A triangular grid (henceforth simply referred as grid) \(\mathbb {T} := (\mathbb {L}_0 , \mathbb {L}_{60} , \mathbb {L}_{120})\) consists of three sets of parallel grid lines, which are inclined at \(0^{\circ }\), \(60^{\circ }\), and \(120^{\circ }\) w.r.t. x-axis. The grid lines in \(\mathbb {L}_0 , \mathbb {L}_{60} , \mathbb {L}_{120}\) correspond to three distinct coordinates, namely \(\alpha , \beta , \gamma \). Three grid lines, one each from \(\mathbb {L}_0 , \mathbb {L}_{60} , \mathbb {L}_{120}\), intersect at a (real) grid point. The distance between two consecutive grid points along a grid line is termed as grid size, \(g\). A line segment of length g connecting two consecutive grid points on a grid line is called grid edge. A portion of the triangular grid is shown in Fig. 2. It has six distinct regions called sextants, each of which is well-defined by two rays starting from \((0, 0, 0)\). For example, Sextant \(1\) is defined by the region lying between \(\{\beta = \gamma = 0, \alpha \ge 0\}\) and \(\{\alpha = \gamma = 0, \beta \ge 0\}\). One of \(\alpha , \beta , \gamma \) is always \(0\) in a sextant. For example, \(\gamma = 0\) in Sextant \(1\) and Sextant \(4\). For a given grid point, \(p\), there are six neighboring UGTs, given by \(\{T_i: i = 0, 1, \ldots , 5\}\). The three coordinates of \(p\) are given by the corresponding moves along a/the shortest path from \((0, 0, 0)\) to \(p\), measured in grid unit. For example, \((1, 2, 0)\) means a unit move along \(0^{\circ }\) followed by two unit moves along \(60^{\circ }\), starting from \((0, 0, 0)\). The grid point \(p\) can have six neighbor grid points, whose direction codes are given by \(\{d : i = 0, 1, . . . , 5\}\).
Definition 2
(triangular curve). A (finite) closed curve \(\mathcal {C}\) imposed on the triangular grid \(\mathbb {T}\) is termed as a triangular curve if its sides coincide with lines in \(\mathbb {L}_0, \mathbb {L}_{60},\) and \(\mathbb {L}_{120}\). It is represented by the (ordered) sequence of its vertices, which are grid points on the triangular grid. It can also be represented by a sequence of directions and a start vertex. Its interior is defined as the set of points with integer coordinates lying inside it. A triangular curve is said to be simple if it does not intersect itself.
The objective is to generate random simple closed triangular digital curves imposed on the background triangular grid \(\mathbb {T}\) where the vertices are grid points.

Portion of a triangular canvas, the UGTs \(\{T_0 , T_1 , . . . , T_5 \}\) incident at a grid point \(p\), and the direction codes \(\{0, 1, . . . , 5\}\) of neighboring grid points of \(p\)

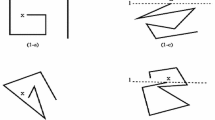
(a) and (b) curves are in same direction, start of \(\mathcal C\) is unreachable, (c) and (d) in opposite direction, \(\mathcal C\) can traverse to its start point
3 Basic Principle
The proposed triangular random digital curve, \(\mathcal C\), selects a random direction from a set of “safe” directions, \(S\), calculated from its current position at the grid point \(p(i,j,k)\). The set \(S\) is computed on the basis of the presence (and orientation) of \(\mathcal C\) in designated set of vertex \(V_d \in N_6(p)\) Footnote 1. The curve grows itself by choosing a random direction from the set \(S\) and eventually concludes at the start point, producing a closed non-intersecting curve with its side lying on \(\mathbb {L}_0, \mathbb {L}_{60},\) and \(\mathbb {L}_{120}\). To compute \(S\), a combinatorial technique is used which guarantee that \(\mathcal C\) never moves into a situation where there is no way for it to meet the start vertex without intersecting itself. The proposed algorithm is designed based on the observation that under no condition, either of incoming or outgoing direction of any two grid points on \(\mathcal C\), separated by unit grid length will be same as the other. When two points on \(\mathcal C\) are unit grid length apart, they describe a closed region. The start point may lie inside the closed region or out side of it but in any case if the directions are same, then the \(\mathcal C\) propagates into a region where the start point does not lie, thus moves into a dead end. As shown in Fig. 3(a) the out going direction at \(v'\) and \(v''\) are same and the start point is in the closed region defined by \(v'\) and \(v''\). In Fig. 3(b) the incoming direction at \(v'\) and \(v''\) are same and the start point is in the closed region defined by \(v'\) and \(v''\). In either of the cases, the curve can never meet the start point without intersecting itself. On the other hand, if the directions at those two points are different there is always a way for the curve to eventually meet \(v_s\) (Fig. 3(c) and (d)). Since there are six possible directions available in triangular grid (Fig. 2), the notion of direction being same or opposite is not so obvious. This is made simpler by considering only two directions namely clockwise and anticlockwise and it is determined by the incoming and outgoing direction at the point \(p\) under consideration. Another fact is that when the curve \(\mathcal {C}\) is at a particular point \(p\), there could be more than one visited neighbor of \(p\) at \(N_6(p)\). Out of all those visited neighbors, the one through which \(\mathcal {C}\) has entered in \(N_6(p)\) is considered to determine \(S\). To find the vertex through which \(\mathcal {C}\) has entered in \(N_6(p)\), a timestamp \(t_i\) is assigned in increasing order to each vertex \(v_i\) as \(C\) grows. If \(v_i\) is generated earlier than \(v_j\) then \(t_i\) is less than \(t_j\).
To start with, a random start grid point \(v_s\) of the curve is chosen randomly and a timestamp of \(t_s=0\) is assigned to it. The curve grows itself from a given (current) point, \(v_c\), by computing set of safe direction \(S\) from \(v_c\) based on the occupancy and orientation of \(\mathcal C\) at the earliest visited amongst the designated neighbours of \(v_c\). Then \(\mathcal C\) chooses its next direction of propagation randomly from \(S\), denoted by \(d_c\). As the curve proceeds along \(d_c\) to the new grid point from \(v_c\), the timestamp of the new point along \(d_c\) is increased by one. The curve repeats this procedure until it reaches to the start point \(v_s\) and concludes.
Since random digital triangular curve of finite length is of our interest, the algorithm is designed to execute on a finite canvas which is parallelogram in shape. So, a boundary condition is imposed such that if \(\mathcal C\) takes a clockwise (anticlockwise) turn when it meets the boundary for the first time, then it will take a clockwise (anticlockwise) turn in all subsequent cases whenever it meets the boundary again. The methods for generating triangular digital curves are described in the following section.
4 Generation of Simple Random Triangular Digital Curves
To generate simple random triangular digital curves of finite length following the principle described in Sect. 3, some rules are formulated. This section explains those rules in detail. Time complexity is discussed at the end of this section.

(a) \(6\) neighbors (b) trap involving \(n_4\) and \(n_0\), (c) trap involving \(n_3\) and \(n_1\)
Let the set \(N=\{n_0, n_1, \ldots , n_5\}\) denotes the six neighbors of a point in triangular grid as shown in Fig. 4(a) and let the neighbor along direction \(d\) is \(n_d\). Also, let \(v_c\) be the current point, and \(v_l\), \(v_f\), and \(v_r\) be the left, front, and right points (Fig. 4(b)). An array b of size \(6\) is considered to signify the \(6\) directions initialized to \(1\), which means all directions are initially permissible. Also, if a neighbour \(n_d\) is already visited then b[\(d\)] is invalidated. However the start vertex is always considered to be not visited, allowing the curve to meet the start vertex whenever it wishes to. The array b is used throughout to compute the set of permissible direction from the current point \(v_c\) until the curve concludes at start point \(v_s\).
To generate random triangular digital curves, only the neighbors \(v_l\), \(v_f\), and \(v_r\) of \(v_c\) are consulted to find \(S\), thus designated set of vertices \(V_d\) consist of \(\{v_l,v_f,v_r\}\). The reason is to avoid potential traps involving neighbors of the current point, \(v_c\). Without loss of generality, let the curve \(\mathcal C\) reaches \(v_c\) from \(v_{in}\) as shown in Fig. 4(b). This means that it has already checked the existence of a possible trap involving either \(n_4\) or \(v_c\) or \(n_0\), whichever is visited earlier, and \(v_{in}\). Now, for a safe move from \(v_c\), possible loop between \(v_{in}\) and the earliest visited of \(\{v_l,v_f,v_r\}\) need to be checked. Suppose after checking the possible loop described in Fig. 4(b) the curve now reaches to \(v_c\) as shown in Fig. 4(c) with the new labels of vertices. Again to make safe move from \(v_c\) the curve needs to check possible loop between earliest visited of \(\{v_l,v_f,v_r\}\) and \(v_{in}\) as shown in Fig. 4(d). Depending on the occupancy and orientation of \(v_l\), \(v_r\), and \(v_f\), there exist three different cases as stated below.

Case I: (a) None of \(\{v_l, v_f, v_r\}\) are visited, (b) Direction array b
-
Case I: None of \(v_l\) , \(v_f\) and \(v_r\) are visited. The curve can move in any direction except in the direction of the visited neighbors.
For example, in Fig. 5(a), none of \(\{v_l, v_f, v_r\}\) are visited. b[5] is assigned \(0\) as the curve has come to \(v_c\) via \(n_5\) (marked as \(v_{in}\) in figure) making it invalid. Thus, the curve can randomly choose one of the directions from \(S=\{0,1,2,3,4\}\) to make further progress, shown as cells with \(1\) in it (Fig. 5(b)).
-
Case II: At least one in {\(v_l\),\(v_f\),\(v_r\)} is visited. Let \(v_m\) from {\(v_l\),\(v_f\),\(v_r\)} has the lowest timestamp, and \(v_{m+1}\) , the grid point next to \(v_m\) on \(\mathcal C\) , lies in \(N_6\) ( \(v_c\) ). For each visited neighbor \(n_d\) of \(v_c\), b[d] is marked as invalid. Then, a traversal is made in b from \(v_m\) in the direction of \(v_m\) to \(v_{m+1}\) (the immediate next cell in b) upto the farthest visited vertex in {\(v_l,v_f,v_r, v_{in}\}\setminus v_m\) setting all the location encountered in b to \(0\) during the traversal. The indices in b with value \(1\) constitute the set of permissible directions, \(S\).
Figure 6 depicts one such situation in which \(v_r\) and \(v_f\) is visited, \(v_r\) has lower timestamp and its next grid point \(v_{m+1}\) (\(v_f\) in this case) lies in \(N_6(v_c)\). Figure 6(b) shows the initial marking; location b[1], b[2] and b[5] are marked \(0\) as \(v_{in}(=n_5)\), \(v_{f}(=n_2)\) and \(v_{r}(=n_1)\) are already visited. The traversal is made in the direction from \(v_r\) to \(v_{m+1}\), in b till \(v_{in}\) thereby setting b[3]=\(0\) and b[4]=\(0\), others being already set to \(0\), thus \(S=\{0\}\). The array b is treated as circular during the traversal. One interesting thing to observe is that the curve can traverse to \(v_c\) following two paths as shown in Fig. 6 (i) keeps the start point \(v_s\) inside (Fig. 6(d)) the closed region defined by \(v_f\) and \(v_c\) and (ii) keeps the start point \(v_s\) outside (Fig. 6(d)) the closed region defined by \(v_f\) and \(v_c\). However, in both the cases the only permissible direction is \(0\).
-
Case III: At least one in {\(v_l\),\(v_f\),\(v_r\)} is visited. Let \(v_m\) from {\(v_l\),\(v_f\),\(v_r\)} has the lowest timestamp, and \(v_{m+1}\) , the grid point next to \(v_m\) on \(\mathcal C\) , does not lie in \(N_6\) ( \(v_c\) ). First, the visited neighbours of \(v_c\) are marked \(0\) in b. Then, a traversal is made from \(v_m\) in forward (backward) direction if there is a clockwise (anticlockwise) turn at \(v_m\) till the farthest visited vertex in {\(v_l,v_f,v_r, v_{in}\}\setminus v_m\) thereby setting all the location encountered in b to \(0\) during the traversal. The indices in b with value \(1\) constitute the set of permissible directions, \(S\), from \(v_c\).
In Fig. 7(a) \(v_m=v_f\) and \(v_{m+1} \notin N_6(v_c)\) and there is an clockwise turn at \(v_m\). Hence, a forward traversal is made from \(v_f\) to \(v_{in}\) which is the farthest visited vertex in \(\{v_l,v_r,v_{in}\}\), as \(v_l\) and \(v_r\) are not visited at all. Thus, \(S=\{0,1\}\).
Figure 8(a) shows another situation in which all of \(\{v_l,v_f,v_r\}\) are visited, \(v_l\) has the lowest timestamp and there is an anti-clockwise turn at \(v_l\). Hence, a backward traversal is made from \(v_l\) to \(v_{in}\) since it is the farthest visited vertex in \(\{v_l,v_r,v_{in}\}\) along backward direction. Thus, \(S=\{4\}\).

Illustration of Case II (a) \(v_r\) is visited and has lowest timestamp, (b) initial marking of b (c) final marking of b (d) \(v_r\) is visited: another scenario of (a)

Illustration of Case III (a) \(v_f\) is visited and has clockwise movement (b) Initial marking of b (c) Final marking of b (d) another alternative of (a)

Another illustration of Case III (a) \(v_l,v_f,v_r\) are all visited, \(v_l\) has lowest timestamp and has clockwise movement (b) Initial marking of b (c) Final marking of b (d) another alternative of (a)
The steps for generating the random curve are captured in the form of pseudo-code as follows


Test of randomness of the generated curves
where \(V_d=\{v_l,v_f,v_r\}\), \(S\) is the set of permissible directions, \(v_c\) is the current vertex, \(d_c\) is incoming direction to \(v_c\), and \(t_i\) is the timestamp of the \(i\)th vertex.
Time Complexity: Every time the curve progresses it computes the set of safe directions, \(S\), from the current point, \(v_c\). To compute \(S\), a fixed number of vertices (\(v_l,v_f,v_r\)) are checked. The number of grid points on the generate curve is of \(O(|\mathcal {C}|/g)\) and the computation of \(S\) at each grid point requires constant amount of time. Thus, the running time of algorithm is linear in the number of grid points on the length of the generated curve which is given by \(O(|\mathcal {C}|/g)\).

Instances of triangular digital random curves on a canvas of size \(50 \times 50\)
5 Experimental Results and Analysis
The proposed algorithm is implemented in C in Ubuntu 12.04, 64-bit, kernel version 3.5.0-43-generic, the processor being Intel i5-3570, 3.4 GHz FSB. Six instances of triangular random curves are shown in Fig. 10, first row shows two random curves for grid length, \(g=4\) whereas the second and third rows show two random curves each for \(g=8\) and \(g=12\) respectively. The figures depict randomness of the curves and also the number of vertices for each curve. The resolution of the curves can be controlled by varying the grid length \(g\).
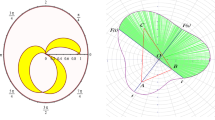
In order to test the randomness of the algorithm, we have generated \(10,000\) curves on a fixed canvas size and counted number of times a grid point in the canvas lies on \(\mathcal {C}\). Figure 9 shows the plot with the coordinates of the grid points along the \(x\) and \(y\) axes whereas the \(z\)-axis represents the frequency. It shows that each of the grid points in the canvas has almost equal frequency (flat at the top) indicating the equal probability of occurrences.
6 Conclusions
A combinatorial technique to generate random triangular digital curve is presented in this paper. The algorithm is linear on the length (in number of grid points) of the generated curve and does not require backtracking. The randomness of the generated curve is obvious from the experimental results. In this work, we have used a regular canvas to generate the curve, however, with some modification the algorithm can be used to generate random curve on any arbitrary canvas. The algorithm can further be tuned to generate random paths inside a digital object which can be useful for practical applications.
Notes
- 1.
Two points \(p\) and \(q\) are said to be \(6\)-connected in a set \(S\) if and only if there exists a sequence \(\langle p = p_0, p_1, \ldots , p_n = q \rangle \subseteq S\) such that \(p_i \in N_6 (p_{i-1})\) for \(1 \leqslant i \leqslant n\). The 6-neighborhood of a point \((x,y,z)\) is given by \(N_6( x,y,z)=\{(x',y'):\max (|x - x'|,\) \(|y - y'|,|z-z'|)=1\}\).
References
Auer, T., Held, M.: Heuristics for the generation of random polygons. In: Proceedings of the Canadian Conference on Computational Geometry, pp. 38–44 (1996)
Bhowmick, P., Bhattacharya, B.B.: Fast polygonal approximation of digital curves using relaxed straightness properties. IEEE Trans. PAMI 29(9), 1590–1602 (2007)
Bhowmick, P., Pal, O., Klette, R.: Linear-time algorithm for the generation of random digital curves. In: Proceedings of the 2010 Fourth Pacific-Rim Symposium on Image and Video Technology, pp. 168–173 (2010)
Dailey, D., Whitfield, D.: Constructing random polygons. In: Proceedings of the 9th ACM SIGITE Conference on Information Technology Education, pp. 119–124 (2008)
Epstein, P.: Generating geometric objects at random. Master’s thesis, CS Dept., Carleton University, Canada (1992)
Klette, R., Rosenfeld, A.: Digital Geometry: Geometric Methods for Digital Picture Analysis. Morgan Kaufmann, San Francisco (2004)
Rennesson, I., Luc, R., Degli, J.: Segmentation of discrete curves into fuzzy segments. Electron. Notes Discrete Math. 12, 372–383 (2003)
Rourke, J., Virmani, M.: Generating random polygons, TR:011. CS Dept. Smith College, Northampton (1991)
Sarkar, A., Biswas, A., Dutt, M., Bhattacharya, A.: Generation of random digital curves using combinatorial techniques. In: Ganguly, S., Krishnamurti, R. (eds.) CALDAM 2015. LNCS, vol. 8959, pp. 286–297. Springer, Heidelberg (2015)
Tomas, A.P., Bajuelos, A.L.: Generating random orthogonal polygons. In: Conejo, R., Urretavizcaya, M., Pérez-de-la-Cruz, J.-L. (eds.) CAEPIA/TTIA 2003. LNCS (LNAI), vol. 3040, pp. 364–373. Springer, Heidelberg (2004)
Zhu, C., Sundaram, G., Snoeyink, J., Mitchell, J.S.B.: Generating random polygons with given vertices. CGTA 6, 277–290 (1996)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Sarkar, A., Biswas, A., Dutt, M., Bhattacharya, A. (2015). Generation of Random Triangular Digital Curves Using Combinatorial Techniques. In: Kryszkiewicz, M., Bandyopadhyay, S., Rybinski, H., Pal, S. (eds) Pattern Recognition and Machine Intelligence. PReMI 2015. Lecture Notes in Computer Science(), vol 9124. Springer, Cham. https://doi.org/10.1007/978-3-319-19941-2_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-19941-2_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-19940-5
Online ISBN: 978-3-319-19941-2
eBook Packages: Computer ScienceComputer Science (R0)
