
Abstract
Pile foundations in seismic areas should be designed against two simultaneous actions arising from kinematic and inertial soil-structure interaction, which develop as a result of soil deformations in the vicinity of the pile and inertial loads imposed at the pile head. Due to the distinct nature of these phenomena, variable resistance patterns develop along the pile, which are affected in a different manner and extent by structural, seismological and geotechnical characteristics. A theoretical study is presented in this article, which aims at exploring the importance of pile diameter in resisting these actions. It is demonstrated that (a) for large diameter piles in soft soils, kinematic interaction dominates over inertial interaction; (b) a minimum and a maximum admissible diameter can be defined, beyond which a pile under a restraining cap will inevitably yield at the head i.e., even when highest material quality and/or amount of reinforcement are employed; (c) an optimal diameter can be defined that maximizes safety against bending failure. The role of diameter in seismically-induced bending is investigated for both steel and concrete piles in homogenous soils as well as soils with stiffness increasing proportionally with depth. A number of closed-form solutions are presented, by means of which a number of design issues are discussed.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
17.1 Introduction
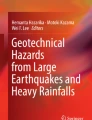
An increasing number of research contributions dealing with the behavior of piles under earthquake action has become available in recent times. The topic started attracting interest by researchers when theoretical studies (accompanied by a limited number of post-earthquake investigations) revealed the development of large bending moments at the head of piles restrained by rigid caps, even in absence of large soil movements such as those induced by slope instability or liquefaction. Nevertheless, the interpretation of available evidence – and thus its implementation in design – has proven to be difficult due to the lack of simple analysis methods to assess the specific type of pile bending. The simultaneous presence of kinematic and inertial interaction phenomena (Fig. 17.1), whose effects are difficult to separate, adds to the complexity of interpreting such data.

Kinematic and inertial loading of pile foundations. (a) Kinematic loading (b) inertial loading
On the other hand, evaluation of kinematic moments is mandatory under certain conditions according to most modern seismic Codes. For example, Eurocode 8 prescribes that: “bending moments developing due to kinematic interaction shall be computed only when all of the following conditions occur simultaneously: (1) the ground profile is of type D, S 1 or S 2 , and contains consecutive layers of sharply differing stiffness; (2) the zone is of moderate or high seismicity, i.e. the product a g S exceeds 0.10 g; (3) the supported structure is of class III or IV”.
The first to propose a simple method for assessing the kinematic component of pile bending appear to be Margason (1975) and Margason and Holloway (1977). These articles can be credited as the first to recognize the importance of pile diameter (to be denoted in the ensuing by d) and recommend using small diameters to “conform to soil movements”, though without providing rational analysis methods. While several subsequent studies investigated the problem (e.g., Kaynia and Kausel 1991; Kavvadas and Gazetas 1993; Pender 1993; Mylonakis 2001; Nikolaou et al. 2001; Castelli and Maugeri 2009; de Sanctis et al. 2010; Sica et al. 2011; Di Laora et al. 2012; Anoyatis et al. 2013; Kampitsis et al. 2013), only a handful of research efforts focused on the effect of pile diameter – mostly for bending in the vicinity of deep interfaces separating soil layers of different stiffness (Mylonakis 2001; Saitoh 2005).
Recently, Di Laora et al. (2013) explored the role of pile diameter in resisting seismic loads at the pile head under a restraining cap, with reference to steel piles in homogeneous soil. Identified key issues include a d 4 dependence of kinematic bending moment at the pile head, as opposed to a mere d 3 dependence of moment capacity. The first dependence results from pile and soil curvatures being approximately equal at the pile head, while the second stems from fundamental strength-of-materials theory. The discrepancy in the exponents suggests that moment demand on the pile increases faster with diameter than moment capacity, thus making yielding at the head unavoidable beyond a certain size (assuming pile is always a flexural element). The value of the maximum diameter was found to depend mainly on peak ground acceleration, soil stiffness and factor of safety against gravity loading. Interestingly, this behavior is not encountered in the vicinity of deep interfaces – which is the topic most investigated in the literature (Mylonakis 2001; Maiorano et al. 2009; Dezi et al. 2010), since in those regions capacity and demand increase with the same power of pile diameter (d 3). Di Laora et al. (2013) also established that combining kinematic and inertial moment at the pile head leads to a limited range of admissible diameters, with the upper bound governed by kinematic action, and the lower one by inertial action.
Proceeding along these lines, the work at hand has the following main objectives: (i) to investigate the relative importance of kinematic and inertial components of seismic demand, and provide a number of closed-form expressions for kinematic/inertial moment demand on piles (ii) to inspect the role of pile diameter on the seismic performance of both steel and concrete piles for the soil types shown in Fig. 17.2; (iii) to provide a number of closed-form solutions for the limit diameters defining the admissible ranges; (iv) to assess the practical significance of the phenomenon through pertinent numerical studies encompassing a wide range of parameters; (v) to define an optimal diameter which maximizes safety against bending failure.

Soil profiles considered in this study. (a) Homogeneous profile (b) two-layer profile (c) inhomogeneous profile
The study employs the following main assumptions: (a) foundation is designed to remain elastic during earthquake ground shaking (i.e., the force modification coefficients are set equal to one); (b) pile is long and can be idealized as a flexural beam that behaves linearly up to the point of yielding; (c) soil restraining action can be modeled using a bed of linear or equivalent-linear Winkler springs, uniformly distributed along the pile axis; (d) pile axial bearing capacity is controlled by both shaft and tip action; (e) perfect contact (i.e., no gap and slippage) exists between pile and soil; (f) group effects on bending at the pile head are minor and can be ignored from a first-order analysis viewpoint. In addition, for the sake of simplicity partial safety factors are not explicitly incorporated in the analysis; a global safety factor is employed instead. It is worth mentioning that the approach in (a) has been questioned in recent years. Under-designing foundations, however, although conceptually promising, is by no means an established design approach and will not be further discussed in this work. Also, the Winkler assumption in (c) is not essential for the subsequent analysis (a wealth of results from numerical continuum solutions do exist as well), yet it is adopted here since it yields sufficiently accurate predictions for the cases examined and allows simple closed-form expressions to be obtained.
17.2 Kinematic Versus Inertial Moment Demand
17.2.1 Kinematic Bending at Pile Head
In recent articles, de Sanctis et al. (2010) and Di Laora et al. (2013) showed that a long fixed-head pile in homogeneous soil experiences a curvature at the top, (1/R) s , which is approximately equal to soil curvature at the same elevation and, thereby, can be computed as:
where (1/R) p , E p and I p are curvature, Young’s modulus and cross-sectional moment of inertia of the pile (for a circular cross section, I p = π d 4/64), (1/R) p and a s are the soil curvature and horizontal acceleration at soil surface respectively, and G s = E s /2(1 + ν s ) is the soil shear modulus, νs being the corresponding Poisson ratio. For layered soil and shallow interfaces located within a few pile diameters from the surface, (17.2) provides only a conservative estimate of kinematic bending at the pile head.
Using rigorous elastodynamic Finite Element analyses, Di Laora and Mandolini (2011) derived a fitting formula for kinematic bending in soils with stiffness varying proportionally with depth:
where \( {\overline{E}}_s \) is the gradient of soil Young’s modulus with respect to depth (Fig. 17.2). Evidently, kinematic moment at the pile head increases with pile bending stiffness and surface acceleration, and decreases with soil stiffness.
17.2.2 Inertial Bending at Pile head
Inertial forces transmitted to piles from an oscillating superstructure, are inherently associated with structural mass. To relate this mass to the geotechnical parameters involved in the problem at hand, it is convenient to assume that the weight carried by each individual pile is a fraction of the pile bearing capacity against axial load, W P . Considering a long floating cylindrical pile in fine-grained soil and neglecting the contribution of base resistance, W p can be expressed in terms of geometry, soil properties and a global safety factor (Viggiani et al. 2011) as
where d and L are the diameter and the length of the pile, S u is the undrained shear strength of the soil material, α the pile-soil adhesion coefficient (typically ranging from 0.3 to 1 depending on the value of undrained shear strength S u ).
Assuming that the lateral load imposed at the pile head is proportional to the corresponding axial gravitational load W p , it is straightforward to show from Winkler theory that the maximum seismic moment developing under a rigid cap for soils having constant stiffness near the surface is:
δ being the Winkler stiffness parameter (which varies between approximately 1–2 for inertial loading – Roesset 1980; Dobry et al. 1982, Syngros 2004), q I = 1 − (1 − 2 t/d)4 a dimensionless geometric factor accounting for wall thickness t of a hollow pile, S a a dimensionless spectral amplification parameter, and g the acceleration of gravity.
The inertial moment at the pile head for soils with stiffness varying proportionally with depth may be calculated according to the formula provided by Reese and Matlock (1956), based on Winkler considerations, which can be expressed using the notation adopted in this paper as
17.2.3 Kinematic Versus Inertial Bending Moments
In light of the above solutions, it is straightforward to derive the ratio of kinematic to inertial bending moments under the same seismic conditions. For a homogeneous soil profile, it is possible to calculate the ratio between the two seismic demands by dividing (17.4) and (17.5). For instance, considering a solid concrete pile (q I = 1) and undrained conditions (ν s = 0.5), one obtains:
The above expression reveals that: (1) the relative magnitudes of kinematic and inertial bending is independent of ground acceleration. Thus, the conditions concerning importance of kinematic loads based on seismicity by the Eurocode seems to be unjustified; (2) Soil stiffness plays a major role on the relative size of the two seismic demands, with the contribution of the kinematic component increasing with decreasing soil stiffness; (3) Kinematic over inertial bending moment ratio increases with the square of pile diameter.
Equation 17.6 is depicted in Fig. 17.3 as function of soil Young’s modulus for different values of spectral amplification S a and different pile lengths and diameters. Evidently, kinematic over inertial bending moment ratio decreases with increasing soil stiffness and with decreasing pile diameter, and decreases with increasing pile length. This must be attributed to the fact that while kinematic bending of flexible piles is independent of pile length, inertial action is proportional to pile length under constant safety factor for gravitational action.

Kinematic/inertial moment ratio for a solid concrete pile in homogeneous soil, as function of soil stiffness, for different values of spectral amplification, pile diameter and pile length
Similar trends are observed for piles in soils with stiffness proportional to depth. Equations 17.2 and 17.5 can be divided to provide the corresponding kinematic over inertial moment ratio:
Compared to the homogeneous case, pile diameter exerts a weaker influence (d1.4 over d2 for the previous case), whereas pile length plays a more important role (L−2 over L −1 dependence).
Equation 17.7 is illustrated in Fig. 17.4 as function of soil Young’s modulus gradient for different values of spectral amplification, pile diameter and pile length.

Kinematic/inertial moment ratio for a solid concrete pile in inhomogeneous soil, as function of soil stiffness gradient, for different values of spectral amplification, pile diameter and pile length
17.3 Pile Size Limitations Under Seismic Loads
The seismic performance of piles under combined kinematic and inertial loading can be investigated by comparing the overall bending demand with the corresponding yield moment of the cross section.
With reference to a cylindrical hollow steel pile, the cross-sectional yield moment in the context of strength-of-materials theory can be computed from the well-known formula
ε y and f y being the uniaxial yield strain and the corresponding yield stress of the steel material, and A the cross-sectional area. Note that for simplicity, no partial factors accounting for material strength have been included in the calculation.
Note that for a pile in layered soil, another critical location for the assessment of seismic demand is interface separating two consecutive layers of sharply differing stiffness. Considering deep interfaces located below the active pile length, kinematic bending may be evaluated from the approximate formula of Di Laora et al. (2012):
where γ 1 is the free-field soil shear strain at interface level in the first layer, ε p /γ 1 the strain transmissibility parameter between pile and soil (Mylonakis 2001).
Clearly bending in such locations is essentially proportional to d 3. As section capacity increases with the same power of diameter, interface bending does not govern the selection of pile diameter.
17.3.1 Steel Piles in Homogeneous Soils
For friction piles in soft soil, axial stresses at the pile top are typically well below the structural capacity (i.e., the term W p /f y A is small) so that section capacity is practically proportional to d 3. As kinematic demand is proportional to the fourth power of pile diameter (d 4), it follows that kinematic action prevails over section capacity with increasing pile size. This suggests that there exists a maximum diameter beyond which the pile is not able to withstand the kinematically imposed bending moments in an elastic manner. On the other hand, inertial action increases in proportion to d 2 and, therefore, withstanding this type of bending requires a minimum diameter – the opposite to the previous behaviour (Fig. 17.5). Both cases are investigated below.

Kinematic and inertial bending moments over corresponding capacity as function of pile diameter
17.3.1.1 Kinematic Loading
Setting the kinematic demand moment in (17.1) equal to the yield moment in (17.8) and considering the axial load W p given by (17.3), one obtains the following dimensionless equation for pile size (Di Laora et al. 2013)
where q A =1− (1 − 2 t/d) 2 is a dimensionless geometric factor accounting for wall thickness, t, of a hollow pile.
Equation 17.10 admits the pair of solutions
the largest of which, corresponding to the (+) sign, defines the critical (maximum) pile diameter to withstand kinematic action.
If shear wave velocity under the square root is expressed in terms of soil Young’s modulus E s and mass density ρ s [νs = 0.5 → E s = 2(1 + ν s )ρ s V s 2 = 3ρ s V s 2], the above solution takes the form:
which has the advantage that the term in brackets does not depend on absolute soil stiffness and strength, but only on their ratio, E s /S u .
In the ideal case of a pile carrying zero axial load (which implies infinite safety against bearing capacity failure due to gravity; SF → ∞), the term in brackets in (17.11) and (17.12) tends to unity and the solution reduces to the simple expression:
which can be obtained directly from (17.1) and (17.8).
17.3.1.2 Inertial Loading
Setting the right sides of (17.4) and (17.8) equal and employing (17.3), the following solution is obtained:
Equation 17.14 defines a critical (minimum) pile diameter to withstand inertial action. In the limit case of zero ground acceleration (a s = 0), (17.14) degenerates to
corresponding to the minimum diameter required to resist the gravitational load W p . The same result can be obtained by setting a s = 0 in (17.10).
17.3.1.3 Combined Kinematic and Inertial Loading
For the more realistic case of simultaneous kinematic and inertial loading, (17.1) and (17.4) can be combined for the overall flexural earthquake demand at the pile head through the simplified superposition formula
where subscript tot stands for “total” and e ki is a correlation coefficient accounting for the lack of simultaneity in the occurrence of maximum kinematic and inertial actions. For simplicity and as a first approximation, e ki = 1 is assumed here.
Setting the total earthquake moment equal to the yield moment in (17.8), one obtains the second-order algebraic equation for pile size
Equation 17.17 can be solved analytically for the pair of pile diameters
which correspond to a minimum value, d 1 , obtained for the negative sign, and a maximum value, d 2 , obtained for the positive sign, respectively. Values between these two extremes define the range of admissible pile diameters for the conditions at hand. It will be demonstrated that d 1 is always larger than d in in (17.14), and d 2 is always smaller than d kin in (17.12) that is, the admissible range of pile diameters is narrower over the hypothetical case of kinematic and inertial loads acting independently.
17.3.1.4 Results
A schematic representation of the foregoing developments is depicted in Fig. 17.6, in terms of pile diameter versus soil stiffness. Diameters lying inside the hatched zone defined by (17.18) are admissible, whereas diameters lying outside the zone are not. Evidently, upper and lower bounds are sensitive to soil stiffness, E s leading to a wider range of admissible diameters as soil becomes progressively stiffer. Naturally, the curves for purely kinematic and purely inertial action (shown by continuous curves) in (17.12) and (17.14) bound the admissible range from above and below, respectively, suggesting that kinematic and inertial moments interact detrimentally for pile safety. Whereas this effect becomes aggravated by the simplifying assumption of simultaneous maxima in kinematic and inertial response (e ki in Eq. (17.16) equal to 1), the same pattern would be obtained for any linear combination of individual moments involving positive multipliers e ki .

Range of admissible diameters for different types of loading
It is worth mentioning that there is always a minimum soil stiffness for which the admissible range collapses to a single point corresponding to a unique admissible diameter (i.e., d 1 = d 2 ). This diameter can be obtained by eliminating the term in square root in (17.18), to get
which, remarkably, is equal to exactly one half of the value obtained for kinematic action alone under zero axial load (17.13). It is noteworthy that this diameter is independent of pile Young’s modulus and wall thickness. Evidently, for stiffness values smaller than critical, no real-valued pile diameters can be predicted from (17.18), which suggests that it is impossible for the pile head to stay elastic under the imposed surface acceleration a s .
With reference to a hollow steel pile, numerical results for the range of admissible diameters predicted by (17.18) is plotted in Fig. 17.7, as function of soil stiffness E s , for different values of surface seismic acceleration (a s /g) and pile length L. The detrimental effect resulting from the particular load combination becomes gradually more pronounced with increasing pile length and seismic acceleration, as higher inertial loads are induced at the pile head. Note that for piles in very soft soil such as peat, having E s less than 10 MPa, maximum pile diameter may be less than 1 m, thereby severely restricting design options.

Admissible pile diameters against soil Young’s modulus (Es/Su = 500, fy = 275 MPa, Ep = 210 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 2.5, FS = 3, t/d = 0.015, α = 0.7, δ = 1.2). Continuous lines represent pure kinematic and inertial actions whereas dashed lines refer to combined action
17.3.2 Steel Piles in Inhomogeneous Soil
Kinematic and inertial demands for inhomogeneous soils in (17.2) and (17.5) may be expressed for undrained conditions, through trivial algebraic manipulation, as:
Equation 17.20 reveals that the effect of pile diameter on peak kinematic bending moment is weaker than in homogeneous soil, as the corresponding exponent is 3.2 (=16/5) instead of 4, due to I p in (17.1). This can be explained considering that an increase in pile diameter corresponds to an increase in pile active length which, in turn, forces a larger portion of progressively stiffer soil to control pile curvature at the head.
While the exponent of 3.2 still exceeds the corresponding exponent in capacity (3 – see 17.8), this is unlikely to create a significant design constraint.
In a similar fashion, (17.21) reveals that the effect of pile diameter on peak inertial moment is weaker than in homogeneous soils with the power dependence on d being 1.8 (=9/5) instead of 2 in (17.4), and thereby size limitation in terms of minimum diameter will be more critical than in homogeneous soil.
Equating seismic moment demand from (17.20) and (17.21) with section capacity in (17.8), the following dimensionless algebraic equation for pile size is obtained:
Due to the intrinsically non-integer nature of the exponents, no exact closed-form solutions for pile diameter can be derived from (17.22). However, a Newton-Raphson approximate scheme may be easily employed to obtain the roots (not shown here) in an iterative manner.
Comparison between size limitations in homogeneous and inhomogeneous soil is provided in Fig. 17.8, where the ranges of admissible diameters are compared for the two cases. As can be noticed, beyond a certain diameter the ratio of demand over capacity for the inhomogeneous case (solid line) becomes nearly constant. This, however, does not indicate an overall weaker influence of kinematic interaction on size limits, as minimum diameter is strongly affected by kinematic demand. In addition, the graphs indicate that, contrary to common perception, kinematic demand is higher than inertial demand starting from relatively small pile diameters.

Kinematic, inertial and combined moment vs. capacity for a homogeneous and an inhomogeneous soil profile. In both graphs, as/g = 0.35, Es/Su = 500, fy = 275 MPa, Ep = 210 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 2.5, FS = 3, t/d = 0.015, α = 0.5, L = 15 m, \( {\overline{\mathrm{E}}}_{\mathrm{s}} \) = 2 MPa/m, Es = \( {\overline{\mathrm{E}}}_{\mathrm{s}} \) L/2 = 15 MPa
To further explore the role of pile size, Fig. 17.9 depicts the bounds of the admissible diameter regions for different values of problem parameters. As anticipated, no controlling maximum diameter exists, so that the upper bound consists of a nearly vertical line in \( {\overline{E}}_s \) – d plane. Pile size limitation thus reduces to establishing a minimum diameter, which increases with increasing soil resistance due to the larger mass carried by the pile under the assumption of a constant SF.

Admissible pile diameters for a tubular steel pile in soil with stiffness proportional to depth. In all graphs, except specifically otherwise indicated, as/g = 0.25, Es/Su = 500, fy = 355 MPa, Ep = 210 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 2.5, FS = 3, t/d = 0.015, α = 0.5, L = 30 m
Figure 17.9a explores the role of design acceleration on pile size. Understandably, the admissible region shrinks with increasing (a s /g), as the latter affects both inertial and kinematic loading, and moves towards larger diameters. It is noted that for cases of moderate to strong seismicity (i.e., a s /g = 0.25–0.35) and common values of design spectral amplification (S a = 2.5), piles in soft clay should possess very high diameters (of the order of 2 m) to resist seismic loads without yielding at the head. This result alone might explain the considerable number of failures at the pile head observed in post-earthquake investigations around the world.
When a preliminary design carried out by axial bearing capacity considerations does not satisfy seismic structural requirements, a solution is to decrease the weight carried by the individual piles by increasing the safety factor SF. The influence of SF on seismic performance is illustrated in Fig. 17.9b, where the minimum diameter decreases with increasing SF. Nevertheless, it should be kept in mind that increasing the safety factor against axial bearing capacity leads to an increase in foundation cost over the original design. Studying this aspect involves additional factors which lie beyond the scope of this work.
In Fig. 17.9c, d the role of section capacity on admissible diameters is examined. Figure 17.9c indicates that lowering the wall thickness may impose a significant restriction on the size of the admissible region, whereas the choice of material strength (Fig. 17.9d) seems to be less important.
17.3.3 Concrete Piles
The behavior of concrete piles is fundamentally different from that of steel piles, as: (1) the moment of inertia of the pile cross section is typically higher; (2) the material has negligible tensile strength, thereby moment capacity relies on steel reinforcement. The impact of these differences on the phenomena at hand is examined below.
In the same spirit as before, critical diameters may be assessed by equating capacity (Cosenza et al. 2011), and demand obtained by summing up the contributions of kinematic and inertial interaction, as shown in the foregoing.
As an example, numerical results for concrete piles in soil with stiffness varying linearly with depth are depicted in Fig. 17.10. This case leads to the narrowest regions of admissible diameters compared to those examined earlier. As in the case of hollow steel piles, maximum diameter in soils with stiffness varying proportionally with depth is not particularly important, as the curves tend to be vertical at the left side of the graphs. On the other hand, kinematic interaction has a profound role in increasing the minimum admissible diameter. Like in the other cases, concrete and steel strengths are of minor importance (Fig. 17.10c, d). On the contrary, seismicity and geometrical parameters (Fig. 17.10a, b) have a considerable effect in controlling the minimum admissible diameter.

Admissible pile diameters for a solid concrete pile in soil with stiffness proportional to depth. In all graphs, except specifically otherwise indicated, as/g = 0.25, Es/Su = 500, Ep = 30 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 1.5, FS = 3, As/Ac = 0.015, fck = 25 MPa, fyk = 450 MPa, c = 5 cm, α = 0.5, L = 30 m
A comparison among the four combinations of sections and soil profiles examined here is provided in Fig. 17.11, where admissible regions are plotted for steel and concrete piles, embedded in homogeneous and linear soil profiles. It is noted that curves corresponding to linearly-varying soil stiffness are somehow rotated with respect to the homogeneous case, due to the different importance of pile diameter in kinematic bending. As already mentioned, maximum diameter is of concern only for homogeneous and very soft inhomogeneous soil, while in all other cases a minimum diameter is of the main concern which may reach large values due to the detrimental interplay of kinematic and inertial components.

Admissible diameters for steel and concrete piles in homogeneous and inhomogeneous soil. For all cases, as/g = 0.25, Es/Su = 500, fy (steel) = 355 MPa, fyk (concrete reinforcement) = 450 MPa, fck = 25 MPa, Ep = 30 GPa or 210 GPa (for concrete and steel, respectively), νs = 0.5, ρs = 1.7 Mg/m3, Sa = 2.5, FS = 3, t/d = As/Ac =0.015, α = 0.5, L = 25 m
17.4 Optimal Pile Diameter
It has already been demonstrated that for a given set of seismicity, geotechnical and structural properties, a pile possesses a limited range of admissible diameters. This means that outside this range, a pile will yield (bending safety factor FS b = M rd /(M kin + M in ) < 1), whereas inside the range it will stay elastic (FS b >1). Naturally, the limits of the range correspond to FS = 1. It can be deduced that there exists a particular diameter, falling within the admissible range, for which bending safety factor is maximum, and thereby it represents an optimum choice from a safety viewpoint.
To derive analytical expressions for the specific diameter for a steel pile in homogeneous soil, we recall that the expressions of moment capacity, kinematic moment and inertial moment can be cast in the simple form:
A 1 to A 4 being parameters that can be readily indentified from the foregoing solutions.
Neglecting the contribution of axial load on section capacity (i.e., setting A2 = 0), the reciprocal of bending safety factor assumes the form:
Differentiating this expression with respect to diameter, one obtains:
The optimal diameter d opt is thereby equal to:
In terms of physical parameters, we obtain the following expression:
As evident from (17.26) and (17.27) optimal diameter, remarkably, does not depend on seismicity and section capacity.
Furthermore, from (17.23b, c) one obtains:
which means that a steel pile sized at d = d opt balances the kinematic and inertial components of total moment demand.
Figure 17.12 provides a graphical representation of the optimal diameter, in the context of the regions of admissible diameters described earliear, obtained both in an approximate and an exact manner through (17.8) and (17.23a). Evidently, the optimal diameter curve intersects the approximate admissible region at point (E s,crit ; d crit ). For stiffer soils, optimal diameter naturally falls within the admissible region and bending safety factor is larger than one. For stiffness smaller than critical, optimal diameter still exists, in the sense that it defines a maximum safety factor below 1. On the other hand, critical diameter possesses the following properties: (a) it leads to a unit safety factor and (b) it balances kinematic and inertial moments. Moreover, the optimal diameter passes close to the critical point predicted from the exact analysis, so that above observations hold regardless of the method employed to evaluate the admissible regions. While, actual design choices for d will naturally involve additional considerations, it is expected that they will lie in the region between the maximum safety curve and the minimum admissible diameter.

Optimal pile diameter and admissible regions for a hollow steel pile in homogeneous soil. (as/g = 0.4, Es/Su = 500, fy = 275 MPa, Ep = 210 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 2.5, FS = 3, t/d = 0.015, α = 0.7, L = 30 m)
The optimal diameter may also be derived analytically for a steel pile in inhomogeneous soil. To this end, kinematic and inertial demand may be expressed as:
In the same vein, the reciprocal of FS b is:
The optimal diameter d opt is obtained by differentiating the above expression with respect to d, to get
Contrary to the previous case, optimal diameter for the particular conditions does not balance kinematic and inertial demands. The corresponding ‘equal demand’ diameter is obtained from (17.29a, b) as:
Figure 17.13 depicts optimal and equal seismic demand diameters for inhomogeneous soil together with rigorous admissible regions corresponding to different material strengths. As anticipated, these diameters are insensitive to seismicity and material properties, so that the curves in the figure pertain to all regions.

Optimal pile diameter and admissible regions for a hollow steel pile and an inhomogeneous soil profile. (as/g = 0.25, Es/Su = 500, Ep = 210 GPa, νs = 0.5, ρs = 1.7 Mg/m3, Sa = 1, FS = 3, t/d = 0.015, α = 0.7, L = 30 m)
17.5 Discussion
It has been shown that, contrary to perceptions reflected in seismic Codes, kinematic bending at the pile head may not be negligible compared to the overall seismic demand, in soft soils and large pile diameters regardless of seismic intensity. In certain cases, kinematic interaction may even be higher than the inertial counterpart.
In addition, the simultaneous action of kinematic and inertial components of pile bending leads to a limited range of admissible pile diameters to resist seismic action. For homogeneous soil, kinematic interaction requires a minimum admissible diameter whereas inertial interaction leads to a corresponding maximum. As these actions interact detrimentally with each other, the range is reduced over the ideal case of kinematic and inertial loads acting independently.
In very soft deposits, if soil stiffness close to the surface (i.e., within a depth of few pile diameters) may be assumed to be nearly constant, kinematic interaction has a dominant influence, thus leading to small maximum admissible diameter. In these cases, inertial interaction leads to smaller pile bending compared to kinematic interaction, yet may have an important effect in reducing the maximum admissible diameter obtained solely for kinematic loading. In the context of the assumptions adopted in this work, pile length has a profound effect in reducing the admissible pile diameter and increasing critical soil stiffness below which no pile diameter is admissible, so that modifications in design coed provisions might be needed.
For stiffer soils and especially for conditions involving linearly-varying stiffness with depth, the limitation in pile size essentially reduces to establishing a minimum diameter. In several cases, safety factors commonly used in classical geotechnical design for axial bearing capacity do not guarantee safety for seismic action. To overcome the problem, a solution could be to increase the number of piles, thus to make the safety factor against gravitational action larger. An alternative is to increase the capacity of the pile cross section by increasing wall thickness or reinforcement. On the contrary, increasing material strength will not substantially improve performance. In other words, for a given design acceleration, the geotechnical and geometrical properties appear to be more important than the structural properties in controlling pile safety. It is worth stressing that these remedial actions may increase foundation cost.
It was also demonstrated that among all admissible diameters for a specific set of problem parameters, there always exists an optimal value that maximizes safety against bending failure. This diameter could be of guidance in designing piles in seismically prone areas. On the other hand, the diameter that minimizes foundation cost requires taking into account additional parameters (including cost of materials and construction methods) that lie beyond the scope of this work.
17.6 Conclusions
Kinematic and inertial interaction between a pile and the surrounding soil are of different nature and, thereby, are affected by pile size in a different manner. In layered soil, bending at deep interfaces is not affected by pile size, at least from a first-order analysis viewpoint, as seismic demand and section capacity increase with the same power of diameter. On the other hand, with reference to a pile head under a restraining cap, it was shown that kinematic bending dominates over inertial bending for large-diameter piles in soft soil regardless of variation of soil stiffness with depth and, therefore, even in conditions for which Codes do not require assessment of kinematic action.
In addition, (a) kinematic interaction provides a maximum diameter beyond which the pile yields, and (b) inertial interaction provides a corresponding minimum diameter. The simultaneous presence of these actions leads to a range of admissible diameters which is narrower than that obtained for kinematic and inertial actions considered independently.
The following general conclusions were drawn from this study:
-
1.
Concrete piles possess a narrower range of admissible diameters to withstand seismic action over hollow steel piles. This can be attributed to the higher bending stiffness of the concrete pile cross-section (which attracts higher kinematic moments), as well as the inability of the concrete material to withstand tension.
-
2.
For soft soils of constant stiffness with depth, kinematic interaction dominates seismic demand. As a result, admissible pile sizes are essentially overbounded by a critical diameter which in some cases may be quite small (of the order of 1 m) and, hence, it may affect design. Under these circumstances, adding more piles or increasing pile length would not improve safety, as these actions will not affect kinematic demand.
-
3.
In stiffer/stronger soils, inertial interaction is dominant due to the heavier loads carried by the pile. This yields a minimum admissible pile diameter which, in areas of moderate to high seismicity, may be quite large (of the order of 1 m or so).
-
4.
Stiffness varying proportionally with depth essentially enforces only a lower bound in pile diameter; this may be rather large (above 2 m) especially for high stiffness gradients. Note that the absence of an upper limit is not due to weak kinematic demand (which can be quite large), but due to a lack of dependence of kinematic moment on pile diameter.
-
5.
The range of admissible diameters decreases with increasing ground acceleration, spectral amplification, soil strength and pile length, whereas it increases with increasing soil stiffness, pile safety factor and amount of reinforcement (or wall thickness for hollow piles). On the other hand, pile material strength plays a minor role in controlling pile size.
-
6.
There always exists a critical soil stiffness or a critical stiffness gradient below which no pile diameter is admissible for a given ground acceleration. Below the particular threshold, a fixed-head flexible pile cannot remain elastic regardless of diameter or material strength.
-
7.
There always exists an optimal diameter that maximizes safety against bending failure. Analytical expressions for steel piles, embedded in both in homogeneous and inhomogeneous soils, have been presented, which reveal that optimal diameter is independent of seismicity and section material properties.
It has to be stressed that the work at hand deals exclusively with the role of pile diameter in the seismic behaviour of piles themselves. The important complementary topic of the role of pile size in reducing seismic forces in the superstructure through kinematic filtering of the seismic waves is addressed elsewhere (Di Laora and de Sanctis 2013).
Despite the simplified nature of some of the assumptions adopted in this work, issues of practical importance related to pile design in seismic areas were quantitatively addressed. Nevertheless, some of the conclusions may require revision in presence of strong nonlinearities such as those associated with high-amplitude earthquake shaking, soil liquefaction and pile buckling. Additional research is required to address issues of this kind.
References
Anoyatis G, Di Laora R, Mandolini A, Mylonakis G (2013) Kinematic response of single piles for different boundary conditions: analytical solutions and normalization schemes. Soil Dyn Earthq Eng 44:183–195
Castelli F, Maugeri M (2009) Simplified approach for the seismic response of a pile foundation. J Geotech Geoenviron Eng 135(10):1440–1451
Cosenza E, Galasso C, Maddaloni G (2011) A simplified method for flexural capacity assessment of circular RC cross-sections. Eng Struct 33:942–946
de Sanctis L, Maiorano RMS, Aversa S (2010) A method for assessing bending moments at the pile head. Earthq Eng Struct Dyn 39:375–397
Dezi F, Carbonari S, Leoni G (2010) Kinematic bending moments in pile foundations. Soil Dyn Earthq Eng 30(3):119–132
Di Laora R, de Sanctis L (2013) Piles-induced filtering effect on the foundation input motion. Soil Dyn Earthq Eng 46:52–63
Di Laora R, Mandolini A (2011) Some remarks about Eurocode and Italian code about piled foundations in seismic area. ERTC-12 workshop on evaluation of EC8, Athens
Di Laora R, Mandolini A, Mylonakis G (2012) Insight on kinematic bending of flexible piles in layered soil. Soil Dyn Earthq Eng 43:309–322
Di Laora R, Mylonakis G, Mandolini A (2013) Pile-head kinematic bending in layered soil. Earthq Eng Struct Dyn 42:319–337
Dobry R, Vicente E, O’Rourke M, Roesset M (1982) Horizontal stiffness and damping of single piles. J Geotech Geoenviron Eng 108(3):439–759
Kavvadas M, Gazetas G (1993) Kinematic seismic response and bending of free-head piles in layered soil. Géotechnique 43(2):207–222
Kampitsis AE, Sapountzakis EJ, Giannakos SK, Gerolymos NA (2013) Seismic soil-pile-structure interaction – a new beam approach. Soil Dyn Earthqu Eng 55:211–224
Kaynia A, Kausel E (1991) Dynamics of piles and pile groups in layered soil media. Soil Dyn Earthq Eng 10(8):385–401
Maiorano RMS, de Sanctis L, Aversa S, Mandolini A (2009) Kinematic response analysis of piled foundations under seismic excitations. Can Geotech J 46(5):571–584
Margason E (1975) Pile bending during earthquakes. Lecture, 6 March 1975, ASCE UC/Berkeley seminar on design construction and performance of deep foundations
Margason E, Holloway DM (1977) Pile bending during earthquakes. In: Sarita Prakashan (ed) Proceedings of 6th world conference on earthquake engineering, Meerut, vol II, 1977, pp 1690–1696
Mizuno H (1987) Pile damage during earthquakes in Japan (1923–1983). In: Nogami T (ed) Dynamic response of pile foundations, vol 11, Geotechnical special publication. ASCE, New York, pp 53–78
Mylonakis G (2001) Simplified model for seismic pile bending at soil layer interfaces. Soils Found 41(3):47–58
Nikolaou A, Mylonakis G, Gazetas G, Tazoh T (2001) Kinematic pile bending during earthquakes analysis and field measurements. Géotechnique 51(5):425–440
Pender M (1993) Seismic pile foundation design analysis. Bull N Z Natl Soc Earthq Eng 26(1):49–160
Reese LC, Matlock MM (1956) Non dimensional solutions for laterally loaded piles with soil modulus assumed proportional to depth. VIII Texas conference SMFE, Spec. Publ. 29, Univ. of Texas, Austin
Roesset JM (1980) The use of simple models in soil-structure interaction. ASCE specialty conference, Knoxville, Civil Engineering and Nuclear Power, vol 2
Saitoh M (2005) Fixed-head pile bending by kinematic interaction and criteria for its minimization at optimal pile radius. J Geotech Geoenviron Eng 131(10):1243–1251
Sica S, Mylonakis G, Simonelli AL (2011) Transient kinematic pile bending in two-layer soil. Soil Dyn Earthq Eng 31(7):891–905
Syngros K (2004). Seismic response of piles and pile-supported bridge piers evaluated through case histories. PhD thesis, City University of New York
Viggiani C, Mandolini A, Russo G (2011) Piles and pile foundations. Spon Press/Taylor and Francis, London/New York
Acknowledgements
Support from ReLUIS research program funded by DPC (Civil Protection Department) of the Italian Government and coordinated by the AGI (Italian Geotechnical Association), is acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
This chapter is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
Copyright information
© 2014 The Author(s)
About this chapter
Cite this chapter
Mylonakis, G., Di Laora, R., Mandolini, A. (2014). The Role of Pile Diameter on Earthquake-Induced Bending. In: Ansal, A. (eds) Perspectives on European Earthquake Engineering and Seismology. Geotechnical, Geological and Earthquake Engineering, vol 34. Springer, Cham. https://doi.org/10.1007/978-3-319-07118-3_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-07118-3_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-07117-6
Online ISBN: 978-3-319-07118-3
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)