
Abstract
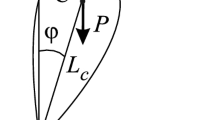
Considered is the rotation of a flexible arm in a horizontal plane about an axis through the arm’s fixed end and driven by a motor whose torque is controlled. The model was derived and investigated computationally by Sakawa for the case that the arm is described as a homogeneous Euler beam. The resulting equation of motion is a partial differential equation of the type of a wave equation which is linear with respect to the state, if the control is fixed, and non-linear with respect to the control.
Considered is the problem of steering the beam, within a given time interval, from the position of rest for the angle zero into the position of rest under a certain given angle.
At first we show that, for every L 2-control which is suitably bounded, there is exactly one (weak) solution of the initial boundary value problem which describes the system without the end condition.
Then we present an iterative method for solving the problem of controllability and discuss its convergence.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
W. Krabs: On Time-Optimal Boundary Control of Vibrating Beams. In: Control Theory for Distributed Parameter Systems and Applications, edited by F. Kappel, K. Kunisch, W. Schappacher. Lecture Notes in Control and Information Sciences No 54, Springer-Verlag: Berlin -Heidelberg -New York -Tokyo 1983, pp. 127 – 137.
W. Krabs: On Moment Theory and Controllability of One-Dimensional Vibrating Systems and Heating Processes. Lecture Notes in Control and Information Sciences No 173, Springer-Verlag: Berlin 1992.
W. Krabs: Controllability of a Rotating Beam. In: Analysis and Optimization of Systems: State and Frequency Domain Approaches for Infinite-Dimensional Systems; edited by R.F. Curtain. Lecture Notes in Control and Information Sciences No 185, Springer-Verlag: Berlin 1993, pp. 447 – 458.
G. Leugering: Control and Stabilization of a Flexible Robotarm. Dynamics and Stability of Systems 5 (1990), 37 -46.
G. Leugering: On Control and Stabilization of a Rotating Beam by Applying Moments at the Base Only. In: Optimal Control of Partial Differential Equations, edited by K.-H. Hoffmann and W. Krabs. Lecture Notes in Control and Information Sciences No 149, Springer-Verlag: Berlin 1991, pp. 182 – 191.
Y. Sakawa, R. Ito and N. Fujii: Optimal Control of Rotation of a Flexible Arm. In: Control Theory for Distributed Parameter Systems and Applications, edited by F. Kappel, K. Kunisch, W. Schappacher. Lecture Notes in Control and Information Sciences No 54, Springer-Verlag: Berlin 1983, pp. 175 – 187.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1994 Springer Basel AG
About this paper
Cite this paper
Krabs, W. (1994). On the Controllability of the Rotation of a Flexible Arm. In: Desch, W., Kappel, F., Kunisch, K. (eds) Control and Estimation of Distributed Parameter Systems: Nonlinear Phenomena. ISNM International Series of Numerical Mathematics, vol 118. Birkhäuser, Basel. https://doi.org/10.1007/978-3-0348-8530-0_15
Download citation
DOI: https://doi.org/10.1007/978-3-0348-8530-0_15
Publisher Name: Birkhäuser, Basel
Print ISBN: 978-3-0348-9666-5
Online ISBN: 978-3-0348-8530-0
eBook Packages: Springer Book Archive