
Abstract
The Liquefaction Experiments and Analysis Projects (LEAP) is an international collaborative project that aims to verify, validate, and quantify the uncertainty of numerical liquefaction models. Within this project, a series of hollow cylinder cyclic torsional shear tests were performed at the Disaster Prevention Research Institute facility at Kyoto University. These tests focused on examining how the relative density affects the cyclic response of Ottawa F-65 sand. The obtained results will contribute to a dependable database for the ongoing and future verification and validation processes of liquefaction models. This paper presents the details of the model preparation and test results, as well as a brief discussion on the influence of the relative density and the tests’ repeatability.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
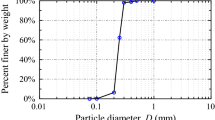
As stated by Tobita et al. (2023), Ottawa F-65 sand was used as the standard sand of the “LEAP-ASIA-2019” exercise. This sand is a clean, poorly graded, whole grain silica sand, containing less than 0.5% fines by mass (Carey et al., 2019).
One of the main objectives of LEAP is to generate a large and high-quality database of physical models and element tests that would contribute to assess and validate the capabilities of the analytical tools to predict the mechanism and consequences of liquefaction. Researchers have made several efforts to establish and expand a laboratory test database to characterize the physical and mechanical properties of Ottawa F-65 sand, which has also been utilized in the LEAP-GWU-2015 and LEAP-UCD-2017 exercises (El Ghoraiby & Manzari (2018), El Ghoraiby et al., 2019; Carey et al., 2019; Parra Bastidas, 2016; Vasko, 2015).
In order to contribute to the understanding of the mechanical properties of Ottawa F-65 sand, a series of hollow cylinder dynamic torsional shear tests for four different relative densities (Dr = 50%, 60%, 70%, and 85%) were conducted in the installations of the Disaster Prevention Research Institute at Kyoto University. Although a comprehensive review of the test findings has already been published (Vargas et al., 2020), this paper focuses on the details of the model preparation and test results of the tests performed before the LEAP-ASIA-2019 workshop, which were made available to modelers for the calibration of constitutive models and simulation of element tests (Ueda et al., 2023).
2 Torsional Shear Apparatus
The torsional shear apparatus used in the tests presented in this paper is schematically shown in Fig. 4.1. The apparatus is capable of subjecting a hollow cylindrical sample with an inner diameter of 6 cm, outer diameter of 10 cm, and height of 10 cm to a wide range of stress paths for both monotonic and dynamic tests.

Torsional shear apparatus at the Disaster Prevention Research Institute – Kyoto University. (Vargas et al., 2020)
As shown in Fig. 4.1, the apparatus can apply vertical load and torque independently using pneumatic cylinders. Following the recommendation of Koseki et al. (2005), the load cell to measure vertical load and torque was placed inside the pressure cell to eliminate friction between the loading shaft and the bearing house.
To avoid non-uniform normal stresses across the sample, the same inner and outer pressures were applied at all test steps; also, since the tests were performed under isotropic conditions, no deviator stresses were applied.
Volumetric strains were measured using a low-capacity differential pressure transducer that measured changes in water volume in a burette connected to the back pressure (maintained at around 200 kPa) and the specimen. Rotational and axial deformations were measured using a potentiometer and a dial gauge, respectively. Table 4.1 summarizes the measured variables and the sensor characteristics.
3 Dynamic Torsional Shear Tests and Model Preparation
Prior to the LEAP-ASIA-2019 Workshop, 16 stress-controlled hollow cylinder dynamic torsional shear tests were conducted under isotropic conditions; Table 4.2 shows the characteristics of each test.
The specimens were prepared taking as a reference the Japanese Standards JGS-0550-2009 (Japanese Geotechnical Society Standards, 2018a–1) and JGS-0551-2009 (Japanese Geotechnical Society Standards, 2018b–2).
3.1 Model Preparation: Air Pluviation and Chamber Setting
To obtain a fabric similar to the physical models (prepared for the “LEAP-ASIA-2019” exercise), the samples were prepared through the “air pluviation” technique, and, to guarantee the homogeneity of the sample and reduce the variability, the height of the pluviation tool was increased during the sample preparation, aiming to keep the dropping height constant along with the sample.
Following the air pluviation process, the top cap was placed, and negative pressure of approximately −15 kPa was applied to the model (between the membranes) to uphold the sample’s shape while removing the molds and placing the cell chamber. Figure 4.2 shows the sample after the placement of the top cap and the removal of molds. To minimize variability and guarantee uniformity among the experiments, precise measurements of the specimen dimensions and sand weight were taken subsequent to mold removal. It is noteworthy that even minor differences in weight or dimensions can considerably influence the estimated relative density.

Hollow cylinder model preparation – model after mold removal
After confirming the model’s density, the outer chamber was carefully placed and fixed to prevent any leakage, as shown in Fig. 4.3.

Hollow cylinder model preparation – outer chamber setting
3.2 Model Preparation: Saturation
Upon filling the outer and inner cells with water, an isotropic pre-consolidation of 20 kPa was applied to both the outer and inner cells to prevent sample deformations in subsequent steps; following this step, the vacuum pressure utilized to preserve the sample’s shape was released.
The saturation process began by flowing CO2 through the sample for around 15 min to promote the dissolution of gas bubbles trapped in the sand. Subsequently, degassed water was flowed through the sample until at least 1 liter of degassed water (roughly twice the sample’s volume) had passed through.
Once the necessary quantity of water had flowed through the sample, a back pressure of 200 kPa was applied to the sample (both inner and outer chambers). The saturation level was then verified by determining the Skempton B value, which was confirmed to be above 0.95 in all experiments for an increment of 20 kPa under isotropic and undrained conditions.
3.3 Model Consolidation and Testing
The specimen was isotropically consolidated to a total pressure of approximately 300 kPa (i.e., 100 kPa of effective stress) under drained conditions. Following the consolidation process, a stress-controlled cycling sinusoidal shear stress was applied to the sample in undrained conditions (Fig. 4.4 shows the applied target wave). As specified in the Japanese Standards (Japanese Geotechnical Society Standards, 2016), the load was applied until achieving at least 7.5% of double amplitude shear strain. Additionally, since the loads were applied using a stress-controlled mechanism, reliable information could not be obtained at very large strains.

Cyclic sinusoidal shear stress applied to the sample. (Vargas et al., 2020)
4 Test Results
The dynamic stress-strain characteristics of 16 hollow cylinder models were estimated using a torsional shear apparatus, as described in Sects. 4.2 and 4.3. Detailed test results (stress-strain characteristics of each model) have been included in the Appendix section.
Figure 4.5 shows the estimated liquefaction resistance curve (LRC) for γDA = 7.5% (i.e., the number of cycles required to reach a 7.5% DA shear strain); a clear trend and consistency among the tests is observed.

Liquefaction resistance curve of Ottawa F-65 sand (γDA = 7.5%). (Vargas et al., 2020)
Similarly, Figs. 4.6, 4.7, and 4.8 show the LRC for γDA = 3.0%, γDA = 1.5%, and ru = 0.95.

Liquefaction resistance curve of Ottawa F-65 sand (γDA = 3.0%). (Vargas et al., 2020)

Liquefaction resistance curve of Ottawa F-65 sand (γDA = 1.5%). (Vargas et al., 2020)

Liquefaction resistance curve of Ottawa F-65 sand (ru = 0.95). (Vargas et al., 2020)
Additionally, as seen in Fig. 4.9, it has been found that the friction angle ϕf value remained constant for all relative densities (ϕf ≈ 35°). On the other hand, the phase transformation angle ϕp increased with the relative density; values of 20.2°, 22.6°, 24.0°, and 25.0° were obtained for relative densities of 50%, 60%, 70%, and 85%, respectively.

(a) Stress path for Model Dr50_3. (b) Stress path for Model Dr60_5. (c) Stress path for Model Dr70_3. (d) Stress path for Model Dr80_2
5 Repeatability of Test Results
To ensure the consistency of the tests, a repeatability test (Dr70_3) was performed; this repeatability test was prepared and tested under the same conditions as test Dr70_2.
Figure 4.10 shows a comparison between the test results of Dr70_2 and Dr70_3 (repeatability test), including the development of excess pore water pressure ratio (EPWP ratio), the development of shear strain, and the corresponding stress path. The results indicate a good agreement between the tests, demonstrating that the tests are repeatable and consistent with each other.

(a) Development of EPWP – Models Dr70_2 and Dr70_3. (b) Development of shear strain – Models Dr70_2 and Dr70_3. (c) Stress path – Models Dr70_2 and Dr70_3. (Vargas et al., 2020)
6 Conclusions
This paper presents a series of hollow cylinder dynamic torsional shear tests performed to contribute to the understanding of the mechanical properties of Ottawa F-65 sand. The tests were developed at the installations of the Disaster Prevention Research Institute (DPRI) at Kyoto University, as part of the “LEAP-ASIA-2019” activities.
-
Based on 16 isotropically consolidated tests, the stress-strain characteristics of Ottawa F-65 sand were investigated under 4 different densities and a wide range of shear stress ratios.
-
Based on the stress paths, it was shown that the friction angle ϕf remained constant for all relative densities (ϕf ≈ 35°); meanwhile, the phase transformation angle ϕp increased with the relative density.
-
The good agreement in the repeatability tests shows that the tests are repeatable and consistent among each other; therefore, the provided test results are ready to be used in the calibration of constitutive models, simulation of element tests, V&V exercises/research, etc.
References
Carey, T. J., Stone, N., & Kutter, B. L. (2019). Grain size analysis and maximum and minimum dry density of Ottawa F-65 sand for LEAP-UCD-2017. Model Tests and Numerical Simulations of Liquefaction and Lateral Spreading: LEAP-UCD-2017.
El Ghoraiby, M. A., & Manzari, M. T. (2018). LEAP-2018 – Stress-strain response of Ottawa F65 sand in cyclic simple shear. DesignSafe-CI, Dataset, https://doi.org/10.17603/DS2HX3H
El Ghoraiby, M. A., Park, H., & Manzari, M. T. (2019). Physical and mechanical properties of Ottawa F65 sand. Model Tests and Numerical Simulations of Liquefaction and Lateral Spreading: LEAP-UCD-2017.
Japanese Geotechnical Society Standards. (2016). Method for cyclic triaxial test on soils – JGS-0541-2009 Laboratory Testing Standards of Geomaterials, Vol. 2.
Japanese Geotechnical Society Standards. (2018a). Practice for preparing hollow cylindrical specimens of soils for torsional shear test – JGS-0550-2009. Laboratory Testing Standards of Geomaterials, Vol. 3.
Japanese Geotechnical Society Standards. (2018b). Method for torsional shear test on hollow cylindrical specimens of soils – JGS-0551-2009. Laboratory Testing Standards of Geomaterials, Vol. 3.
Koseki, J., Yoshida, T., & Sato, T. (2005). Liquefaction properties of Toyoura sand in cyclic torsional shear tests under low confining stress. Soil and Foundations, 45(5), 103–113.
Parra Bastidas, A. M. (2016). Ottawa F-65 sand characterization. PhD Dissertation, University of California, Davis.
Tobita, T., Ichii, K., Ueda, K., Uzuoka, R., Vargas, R., Okamura, M., Sjafruddin, A. N., Takemura, J., Hang, L., Iai, S., Boksmati, J., Fusco, A., Torres-Garcia, S., Haigh S, Madabhushi G, Manzari M, Escoffier, S., Li, Z., Kim, D. S., Manandhar, S., Hung, W. Y., Huang, J. X., Pham, T. N. P., Zeghal, M., Abdoun, T., Korre, E., Kutter, B. L., Carey, T. J., Stone, N., Zhuo, Y. G., Liu, K., & Ma, Q. (2023). LEAP-ASIA-2019: Summary of centrifuge experiments on liquefaction-induced lateral spreading: Validation and applicability of the generalized scaling law.
Ueda, K., Tanaka, Y., Sahare, A., Elgamal, A., Qiu, Z., Wang, R., Zhu, T., Zhou, C., Zhang, J.M., Reyes-Parra, A., Barrero, A., Taiebat, M., Yuyama, W., Iai, S., Hyodo, J., Ichii, K., Elbadawy, M., Zhou, Y. G., Fasano, G., Chiaradonna, A., Bilotta, E., Arduino, P., Zeghal, M., Manzari, M., & Tobita, T. (2023). LEAP-ASIA-2019 simulation exercise: Calibration of constitutive models and simulations of the element tests.
Vargas, R., Ueda, K., & Uemura, K. (2020). Influence of the relative density and K0 effects in the cyclic response of Ottawa F-65 sand – Cyclic torsional hollow-cylinder shear tests for LEAP-ASIA-2019. Soil Dynamics and Earthquake Engineering, 133, 106111. https://doi.org/10.1016/j.soildyn.2020.106111
Vasko, A. (2015). An investigation into the behavior of Ottawa sand through monotonic and cyclic shear tests. MS thesis. George Washington University.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Appendix: Stress-Strain Characteristics of the Hollow Cylinder Dynamic Torsional Shear Tests (Figs. 4.A1, 4.A2, 4.A3, 4.A4, 4.A5, 4.A6, 4.A7, 4.A8, 4.A9, 4.A10, 4.A11, 4.A12, 4.A13, 4.A14, 4.A15 and 4.A16)
Appendix: Stress-Strain Characteristics of the Hollow Cylinder Dynamic Torsional Shear Tests (Figs. 4.A1, 4.A2, 4.A3, 4.A4, 4.A5, 4.A6, 4.A7, 4.A8, 4.A9, 4.A10, 4.A11, 4.A12, 4.A13, 4.A14, 4.A15 and 4.A16)

(a) Time history of shear stress – Model Dr50_1. (b) Time history of EPWP ratio development – Model Dr50_1. (c) Stress-strain curve – Model Dr50_1. (d) Stress path – Model Dr50_1

(a) Time history of shear stress – Model Dr50_2. (b) Time history of EPWP ratio development – Model Dr50_2. (c) Stress-strain curve – Model Dr50_2. (d) Stress path – Model Dr50_2

(a) Time history of shear stress – Model Dr50_3. (b) Time history of EPWP ratio development – Model Dr50_3. (c) Stress-strain curve – Model Dr50_3. (d) Stress path – Model Dr50_3

(a) Time history of shear stress – Model Dr50_4. (b) Time history of EPWP ratio development – Model Dr50_4. (c) Stress-strain curve – Model Dr50_4. (d) Stress path – Model Dr50_4

(a) Time history of shear stress – Model Dr60_1. (b) Time history of EPWP ratio development – Model Dr60_1. (c) Stress-strain curve – Model Dr60_1. (d) Stress path – Model Dr60_1

(a) Time history of shear stress – Model Dr60_2. (b) Time history of EPWP ratio development – Model Dr60_2. (c) Stress-strain curve – Model Dr60_2. (d) Stress path – Model Dr60_2

(a) Time history of shear stress – Model Dr60_3. (b) Time history of EPWP ratio development – Model Dr60_3. (c) Stress-strain curve – Model Dr60_3. (d) Stress path – Model Dr60_3

(a) Time history of shear stress – Model Dr60_4. (b) Time history of EPWP ratio development – Model Dr60_4. (c) Stress-strain curve – Model Dr60_4. (d) Stress path – Model Dr60_4

(a) Time history of shear stress – Model Dr60_5. (b) Time history of EPWP ratio development – Model Dr60_5. (c) Stress-strain curve – Model Dr60_5. (d) Stress path – Model Dr60_5

(a) Time history of shear stress – Model Dr70_1. (b) Time history of EPWP ratio development – Model Dr70_1. (c) Stress-strain curve – Model Dr70_1. (d) Stress path – Model Dr70_1

(a) Time history of shear stress – Model Dr70_2. (b) Time history of EPWP ratio development – Model Dr70_2. (c) Stress-strain curve – Model Dr70_2. (d) Stress path – Model Dr70_2

(a) Time history of shear stress – Model Dr70_3. (b) Time history of EPWP ratio development – Model Dr70_3. (c) Stress-strain curve – Model Dr70_3. (d) Stress path – Model Dr70_3

(a) Time history of shear stress – Model Dr70_4. (b) Time history of EPWP ratio development – Model Dr70_4. (c) Stress-strain curve – Model Dr70_4. (d) Stress path – Model Dr70_4

(a) Time history of shear stress – Model Dr85_1. (b) Time history of EPWP ratio development – Model Dr85_1. (c) Stress-strain curve – Model Dr85_1. (d) Stress path – Model Dr85_1

(a) Time history of shear stress – Model Dr85_2. (b) Time history of EPWP ratio development – Model Dr85_2. (c) Stress-strain curve – Model Dr85_2. (d) Stress path – Model Dr85_2

(a) Time history of shear stress – Model Dr85_3. (b) Time history of EPWP ratio development – Model Dr85_3. (c) Stress-strain curve – Model Dr85_3. (d) Stress path – Model Dr85_3
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this paper

Cite this paper
Vargas, R.R., Ueda, K., Uemura, K. (2024). Dynamic Torsional Shear Tests of Ottawa F-65 Sand for LEAP-ASIA-2019. In: Tobita, T., Ichii, K., Ueda, K. (eds) Model Tests and Numerical Simulations of Liquefaction and Lateral Spreading II. LEAP 2019. Springer, Cham. https://doi.org/10.1007/978-3-031-48821-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-48821-4_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-48820-7
Online ISBN: 978-3-031-48821-4
eBook Packages: EngineeringEngineering (R0)