
Abstract
For curves \(\gamma \colon [a,b] \to \mathbb {R}^n\) there is an analog \(\kappa \colon [a,b] \to \mathbb {R}^{n-1}\)of the curvature function of a plane curve. In the context of unit speed curves, this function \(\kappa \) determines \(\gamma \) up to an orientation-preserving rigid motion of \(\mathbb {R}^n\). Before we can define \(\kappa \), we have to study parallel normal vector fields along a curve in \(\mathbb {R}^n\).
You have full access to this open access chapter, Download chapter PDF
For curves \(\gamma \colon [a,b] \to \mathbb {R}^n\) there is an analog \(\kappa \colon [a,b] \to \mathbb {R}^{n-1}\)of the curvature function of a plane curve. In the context of unit speed curves, this function \(\kappa \) determines \(\gamma \) up to an orientation-preserving rigid motion of \(\mathbb {R}^n\). Before we can define \(\kappa \), we have to study parallel normal vector fields along a curve in \(\mathbb {R}^n\).
1 Parallel Transport
Definition 4.1
Let \(\gamma \colon [a,b]\to \mathbb {R}^n\) be an immersion with unit tangent field \(T\colon [a,b]\to \mathbb {R}^n\). Then a smooth map \(Z\colon [a,b]\to \mathbb {R}^n\) is called a normal field for \(\gamma \) if
for all \(x\in [a,b]\). The \((n-1)\)-dimensional linear subspace \(T(x)^\perp \) is called the normal space of \(\gamma \) at x.
If \(Z\colon [a,b]\to \mathbb {R}^n\) is a normal field for \(\gamma \), then we can split its derivative \(Z'\) into its tangential part and its normal part:
where \(\lambda \colon [a,b]\to \mathbb {R}\) is a smooth function and W is another normal field. It turns out that \(\lambda (x)\) can be computed from \(Z(x)\) alone, without taking the derivative of Z: differentiating the expression \(\langle Z,T\rangle =0\) we obtain
The scalar product \(\langle Z',Z\rangle =\frac {1}{2}\langle Z,Z\rangle '\) measures how the length of Z changes along \(\gamma \). A component of \(Z'\) orthogonal to Z and T indicates a rotation of Z around the tangent T. If Z has constant length and there is no such twisting, Z is called parallel:
Definition 4.2
A normal field\(Z\colon [a,b]\to \mathbb {R}^n\) along a curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) with unit tangent field \(T\colon [a,b]\to \mathbb {R}^n\) is called parallel if there is a function \(\lambda \colon [a,b]\to \mathbb {R}\) such that
There is a parallel normal field Z for every immersion \(\gamma \) and all such fields come in an \((n-1)\)-parameter family:
Theorem 4.3
Given a vector\(W\in T(a)^\perp \)in the normal space of a curve\(\gamma \colon [a,b]\to \mathbb {R}^n\)at a, there is a unique parallel normal field\(Z\colon [a,b]\to \mathbb {R}^n\)of\(\gamma \)such that
If\(Z,Y\)are two parallel normal fields along\(\gamma \), their scalar product\(\langle Z,Y\rangle \)is constant.
Proof
If Z is a parallel normal vector field along \(\gamma \) with \(Z(a)=W\), then differentiating the equation \(\langle Z,T\rangle =0\) yields \(\langle Z',T\rangle + \langle Z,T'\rangle =0\) and, using \(Z'=-\langle Z,T'\rangle T\), we see that Z solves the linear initial value problem
By the Picard-Lindelöf theorem, such a solution is unique, which proves the uniqueness part of our claim. For the existence part, let Z be the solution of the above initial value problem. For any further solution Y of the above differential equation we have
and therefore the scalar product \(\langle Z,Y\rangle \) is constant. In particular, \(Y=T\) is such a solution, so \(\langle Z(a),T(a)\rangle =0\) implies \(\langle Z,T\rangle =0\). Therefore Z is a normal field, in fact a parallel one. □
If \(\gamma \colon [a,b]\to \mathbb {R}^n\) is a curve and W is a vector in \(T(a)^\perp \), for every \(x\in [a,b]\) we can use the parallel normal field Z with \(Z(a)=W\) to “transport” W to a normal vector \(Z(x)\in T(x)^\perp \). This parallel transport map
is obviously linear, and by Theorem 4.3 it is in fact orthogonal, i.e. it preserves scalar products. Moreover, each normal space \(T(x)^\perp \) carries an orientation in the sense that a basis \(W_1,\ldots ,W_{n-1}\) of \(T(x)^\perp \) is called positively oriented if
If \(W_1,\ldots ,W_{n-1}\) is a positively oriented basis of \(T(a)^\perp \) and \(Z_1,\ldots ,Z_{n-1}\) are parallel normal fields with \(Z_j(a)=Y_j\) then the map
is continuous and never zero. Therefore, for all \(x\in [a,b]\) we have
and the map \(P(x)\) is orientation-preserving. We summarize this as follows:
Definition 4.4
Given a curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) and \(x\in [a,b]\), the orientation-preserving orthogonal map \(P(x)\colon T(a)^\perp \to T(x)^\perp \) defined above is called the parallel transport from the normal space \(T(a)^\perp \) to the normal space \(T(x)^\perp \).
By Theorem 4.3, each vector \(Z(x)\) of a parallel normal field has the same length. Therefore, we can use parallel normal fields Z in order to displace a curve \(\gamma \) by a fixed distance \(\epsilon =|Z|\), without introducing unnecessary twisting:
Definition 4.5
If Z is a parallel normal field along a curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) and the derivative of
vanishes nowhere, then the \(\tilde {\gamma }\) is called a parallel curve of \(\gamma \).
For a curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) the continuous (but not necessarily smooth) function
is called the absolute curvature of \(\gamma \). If \(\epsilon >0\) is such that
and Z is a parallel normal field with \(|Z|=\epsilon \) then by the Cauchy-Schwarz inequality we have
Therefore, if we pick a vector \(W\in T(a)^\perp \) with sufficiently small norm and define Z as the parallel normal field Z with \(Z(a)=W\), then \(\gamma +Z\) will be a parallel curve for \(\gamma \).
As an application, we always visualize a curve in \(\mathbb {R}^3\) by thickening it, which means that we chose a suitable collection of \(W\in T(a)^\perp \) with small length and draw the union of the corresponding parallel normal fields. Most of the time we use a small circle centered at the origin in \(T(a)^\perp \), but different choices (as in Fig. 4.1) are also possible.

A closed curve in the normal space \(T(a)^\perp \) is used to build a thickened version of \(\gamma \) by parallel transport
2 Curvature Function of a Curve in \(\mathbb {R}^n\)
We saw in Sect. 3.1 that, up to rigid motions of \(\mathbb {R}^2\), the geometry of a unit speed curve \(\gamma \colon [a,b]\to \mathbb {R}^2\) is completely determined by its curvature function \(\kappa \colon [a,b]\to \mathbb {R}\). Here we will define a similar curvature function \(\kappa \colon [a,b]\to \mathbb {R}^{n-1}\) for any unit speed curve \(\gamma \colon [a,b]\to \mathbb {R}^n\). To define \(\kappa (x)\), we use parallel transport to transfer the normal vector \(T'(x)\in T(x)^\perp \) to the normal space \(T(a)^\perp \). Afterwards we use an orthonormal basis of \(T(a)^\perp \) in order to identify \(T(a)^\perp \) with \(\mathbb {R}^{n-1}\).
Theorem 4.6
Let\(\gamma \colon [a,b]\to \mathbb {R}^n\)be a curve with unit tangent T and parallel transport maps\(P(x)\colon T(a)^\perp \to T(x)^\perp \). Then there is a unique smooth map\(\Psi \colon [a,b]\to T(a)^\perp \)such that for all\(x\in [a,b]\)we have
\(\Psi \)is called theHasimoto curvatureof\(\gamma \).
See Sect. 5.3 for the details on Hasimoto’s contribution. The Hasimoto curvature determines \(\gamma \) uniquely:
Theorem 4.7
Given a point\(\mathbf {p}\in \mathbb {R}^n\), a unit vector\(S\in \mathbb {R}^n\)and a smooth map\(\Psi \colon [a,b]\to T(a)^\perp \), there is a unique unit speed curve\(\gamma \colon [a,b]\to \mathbb {R}^n\)such that\(\gamma (a)=\mathbf {p}\), \(\gamma '(a)=S\)and\(\Psi \)is the Hasimoto curvature of\(\gamma \)(see Fig.4.2).

The Hasimoto curvature \(\Psi \) of a curve \(\gamma \) indicated as a blue curve in \(T(a)^\perp \)
Proof
First we prove uniquess of \(\gamma \). Let \(\gamma \colon [a,b]\to \mathbb {R}^n\) be a curve with the desired properties. Choose an orthonormal basis \(W_1,\ldots ,W_{n-1}\) of \(T(a)^\perp \) such that
and define \(\kappa _1,\ldots \kappa _{n-1}\) by
Let \(Z_1,\ldots ,Z_{n-1}\) be the parallel normal fields along \(\gamma \) such that \(Z_j(a)=W_j\) for all \(j\in \lbrace 1,\ldots ,n-1\rbrace \). Then
solves the initial value problem
and is therefore uniquely determined by \(\mathbf {p}\), S and \(\Psi \). In particular, T is uniquely determined and so is
For existence, we can use the above initial value problem to define the vector fields \((Z_1,\ldots ,Z_{n-1},T)\). At \(x=a\) these vectors are orthonormal and their pairwise scalar products solve the system of linear differential equations
We can interpret this as an initial value problem for the functions \(\langle T,Z_j\rangle \), \(\langle T,T\rangle \) and \(\langle Z_i,Z_j\rangle \). The functions \(\langle T, Z_j \rangle = 0, \langle T, T\rangle = 1, \langle Z_i, Z_j\rangle = \delta _{ij}\) solve this initial value problem, and by Picard and Lindelöf such a solution is unique. Therefore, \((Z_1,\ldots ,Z_{n-1},T)\) stay orthonormal. So by integration of T we obtain a unit speed curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) with \(\gamma (a)=\mathbf {p}\) and \(\gamma '(a)=S\). \(Z_1,\ldots Z_{n-1}\) are parallel normal fields along \(\gamma \) with \(Z_j(a)=W_j\). Because we already know that \(T'=-\sum _{j=1}^{n-1}\kappa _j Z_j\), this implies that \(\Psi \) is indeed the Hasimoto curvature of \(\gamma \). □
In the above proof we used a basis of \(T(a)^\perp \) in order to turn \(\Psi \) into an \(\mathbb {R}^{n-1}\)-valued function \(\kappa \). This function is the promised analog of the curvature function of a plane curve:
Definition 4.8
Let \(\gamma \colon [a,b]\to \mathbb {R}^n\) be a unit speed curve with unit tangent T and Hasimoto curvature \(\Psi \). Let \(W_1,\ldots ,W_{n-1}\) be a positively oriented orthonormal basis of \(T(a)^\perp \). Then the function
defined by
is called a curvature function of \(\gamma \).
In the case \(n=2\) the positively oriented orthonormal basis of \(T(a)^\perp \) mentioned in the above definition is unique, and therefore each plane curve has a unique curvature function \(\kappa \colon [a,b]\to \mathbb {R}^1=\mathbb {R}\), which is the one we already encountered in Sect. 3.1. It is clear from its definition that for any n the function \(\kappa \) is at least unique up to a rotation of \(\mathbb {R}^{n-1}\):
Theorem 4.9
If\(\kappa ,\tilde {\kappa }\colon [a,b]\to \mathbb {R}^{n-1}\)are curvature functions of the same curve\(\gamma \colon [a,b]\to \mathbb {R}^n\), then there is an orthogonal\(((n-1)\times (n-1))\)-matrix A with\(\det A=1\)such that
On the other hand, as in the case of curves in \(\mathbb {R}^2\), for every curvature function \(\kappa \colon [a,b]\to \mathbb {R}^{n-1}\) there is a corresponding curve \(\gamma \colon [a,b]\to \mathbb {R}^n\) and \(\gamma \) is unique up to post-composition with an orientation preserving rigid motion of \(\mathbb {R}^n\). Also the following theorem is a direct consequence of Theorem 4.7:
Theorem 4.10
Given a smooth function\(\kappa \colon [a,b]\to \mathbb {R}^{n-1}\), there is a unit speed curve\(\gamma \colon [a,b]\to \mathbb {R}^n\)for which\(\kappa \)is a curvature function. The curve\(\gamma \)is unique up to an orientation preserving rigid motion of\(\mathbb {R}^n\), which means that if\(\tilde {\gamma }\)is another curve having\(\kappa \)as a curvature function, then there is an orthogonal\((n\times n)\)-matrix A with\(\det A=1\)and a vector\(\mathbf {b}\in \mathbb {R}^n\)such that
3 Geometry in Terms of the Curvature Function
Let \(\gamma \colon [a,b]\,{\to }\,\mathbb {R}^n\) be a unit speed curve with unit tangent field T and \(W_1,\ldots ,W_{n-1}\) a positively oriented orthonormal basis of \(T(a)^\perp \). Let \(Z_1,\ldots ,Z_{n-1}\) be the corresponding parallel normal fields along \(\gamma \) with \(Z_j(a)=W_j\). Then we can describe every normal field Y along \(\gamma \) in terms of a function \(y\colon [a,b]\to \mathbb {R}^n\) as
where for \(x\in [a,b]\) the matrix \(N(x)\) has the vectors \(Z_1(x),\ldots , Z_{n-1}(x)\in \mathbb {R}^n\) as its column vectors. In terms of the curvature function \(\kappa \) introduced in Definition 4.8 the derivative of Y can be expressed as
In particular, for \(Y=T'\) we obtain
Now we are able to generalize the results we obtained in Sect. 3.3 for plane curves:
Theorem 4.11
A unit speed curve\(\gamma \colon [a,b]\to \mathbb {R}^n\)is torsion-free elastic if and only if there is a constant\(\lambda \in \mathbb {R}\)such that its curvature function\(\kappa \)satisfies
Proof
By Theorem 2.23, \(\gamma \) is torsion-free elastic if and only if there is a constant \(\lambda \in \mathbb {R}\) such that
□
Here are further examples of how the geometry of \(\gamma \) is reflected in the properties of \(\kappa \):
Theorem 4.12
Let\(\kappa \colon [a,b]\to \mathbb {R}^{n-1}\)be a curvature function of a unit speed curve\(\gamma \colon [a,b]\to \mathbb {R}^n\). Then:
-
(i)
\(\kappa =0\)if and only if the image of\(\gamma \)lies on a straight line.
-
(ii)
\(\kappa \)is a non-zero constant if and only if the image of\(\gamma \)lies on a circle.
-
(iii)
The image of\(\kappa \)lies in a hyperplane through the origin of\(\mathbb {R}^{n-1}\)if and only if the image of\(\gamma \)lies in a hyperplane of\(\mathbb {R}^n\).
-
(iv)
The image of\(\kappa \)lies in a hyperplane of\(\mathbb {R}^{n-1}\)that does not pass through the origin if and only if the image of\(\gamma \)lies in a hypersphere of\(\mathbb {R}^n\)(see Fig.4.3).
Fig. 4.3 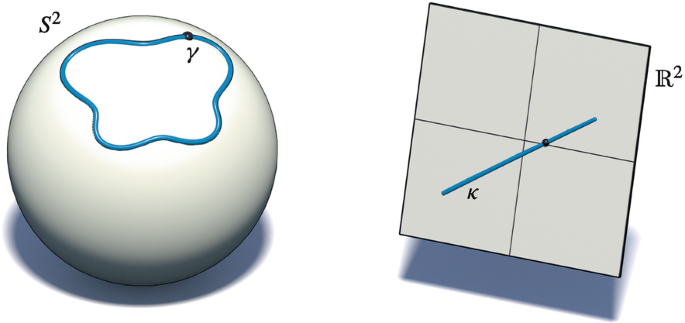
The curvature function \(\kappa \) of a curve on \(S^2\) lies on a straight line which does not pass through the origin

Proof
Claim (i) is obvious, since the image of a curve lies on a straight line if and only if its unit tangent T is constant. If the image of \(\kappa \) lies in a hyperplane through the origin of \(\mathbb {R}^{n-1}\), there is a unit vector \(\mathbf {a}\in \mathbb {R}^{n-1}\) such that \(\langle \mathbf {a},\kappa \rangle =0\). Then
so there is a fixed vector \(\mathbf {n}\in \mathbb {R}^n\) such that \(N\mathbf {a}=\mathbf {n}\). We have
and therefore the image of \(\gamma \) is contained in a hyperplane with normal vector \(\mathbf {n}\). The proof of the converse is left to the reader. This establishes (iii). For (iv), suppose that there is a unit vector \(\mathbf {a}\in \mathbb {R}^{n-1}\) and a number \(r>0\) such that
Then
so there is a fixed point \(\mathbf {m}\in \mathbb {R}^n\) such that
and we have
Therefore, the image of \(\gamma \) lies on the hypersphere with center \(\mathbf {m}\) and radius r. Again, the proof of the converse is left to the reader and we have established (iv). For (ii) we use induction on n based on (iii), starting at \(n=2\) where we use (iv). □
Author information
Authors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this chapter

Cite this chapter
Pinkall, U., Gross, O. (2024). Parallel Normal Fields. In: Differential Geometry. Compact Textbooks in Mathematics. Birkhäuser, Cham. https://doi.org/10.1007/978-3-031-39838-4_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-39838-4_4
Published:
Publisher Name: Birkhäuser, Cham
Print ISBN: 978-3-031-39837-7
Online ISBN: 978-3-031-39838-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)