
Abstract
Slope monitoring and early warning systems (EWS) are a promising approach toward mitigating landslide-induced disasters. Many large-scale sediment disasters result in the destruction of infrastructure and loss of human life. The mitigation of vulnerability to slope and landslide hazards will benefit significantly from early warning alerts. The authors have been developing monitoring technology that uses a Micro Electro Mechanical Systems (MEMS) tilt sensor array that detects the precursory movement of vulnerable slopes and informs the issuance of emergency caution and warning alerts. In this regard, the determination of alarm thresholds is very important. Although previous studies have investigated the recording of threshold values by an extensometer which installation at appropriate sites is rather difficult. The authors prefer tilt sensors and have proposed a novel threshold for the tilt angle, which was validated in this study. This threshold has an interesting similarity to the previously reported values using viscous models. Additionally, multi-point monitoring has recently emerged and allows for many sensors to be deployed at vulnerable slopes without disregarding the slope’s precursory local behavior. With this new technology, the detailed spatial and temporal variation of the behavior of vulnerable slopes can be determined as the displacement proceeds toward failure.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Slope instability is a natural hazard that exerts a profound influence on the operation and reliability of infrastructure. Unlike engineered structures, natural slopes are not designed for safe performance. As a consequence of natural processes, slopes have heterogeneous material properties. Moreover, slopes are prone to erosion, and their gradient changes with time. Underground hydrology is hardly captured in practical engineering. Therefore, quantitatively assessing the extent of slope stability is very difficult in practical situations. Although the movement of landslide masses, which has been slow in conventional studies, is already a major threat to human activities, rapid and unpredictable slope failure triggered by gravity or heavy rain is more hazardous because it may instantaneously result in an enormous loss of human life and the destruction of infrastructure. However, predicting the abrupt failure of slopes to avoid damage is still difficult. Communities in mountain regions are particularly prone to this type of damage. The situation is more serious for transportation infrastructure because its function can be entirely disrupted by a single slope failure (Lee et al. 2013; Sartori et al. 2003). Ongoing global climate change increases the likelihood of heavy and concentrated rainfall, which results in more rainfall-induced slope failures.
As stated above, the mitigation of landslide disasters is difficult and the available funding for conducting elaborate site investigations is far too little. Practitioners have been trying to improve safety by developing slope monitoring and early warning system (EWS) technologies with the objective of predicting slope failure in advance based on the observed slope behavior and mitigating the extent of damage (Medina-Cetina and Nadim 2008). The United Nations International Strategy for Disaster Reduction (UN-ISDR 2006) advocates that EWS should “empower individuals and communities threatened by hazards to act within sufficient time and in an appropriate manner to reduce the possibility of personal injury, loss of life, and damage to property and the environment” (from the UN-ISDR web site).
There is a long history of prevention and mitigation of rainfall and/or scouring-induced landslides. Mechanical countermeasures to prevent slope failure have been widely used, including retaining walls and ground anchors. However, these methods can be expensive and are not always realistically applicable to all slopes of varying scales and potential risk factors. Therefore, careful monitoring of slope behavior and consequent early warning of failure provides a reasonable and slope-specific alternative.
In this paper, an early warning system for slope failure is proposed and its development is described (Fig. 1) (Wang et al. 2017). The system consists of a minimum number of low-cost sensors strategically placed on a slope, with monitoring data that are collected being transmitted via a wireless network. It is anticipated that this low-cost and simple system will provide at residents risk with access to accurate and timely precautions or warnings of slope failure.

Schematic illustration of MEMS tiltometer sensor for early warning (Wang et al. 2017)
Uchimura et al. (2015) summarized case studies of slope tilting rates during pre-failure stages obtained on several natural slope sites under natural or artificial heavy rainfall. Figure 2 presents an example of the typical monitoring data obtained, in which the tilting rate (X-axis) can be related with the time elapsed until slope failure or slope stabilization (Y-axis). Figure 3 shows the definition of the tilting rate and the time in Fig. 2, in which Ti is the time until failure or stabilization, and Ri is tilting rate.

Graphic illustration of the tilting rate as a function of time before slope failure (or stabilization) for several case studies (Uchimura et al. 2015)

Definition of the tilting rate and the durations (Uchimura et al. 2015)
In cases where the slope failed at the position of the tilt sensor, the elapsed time is measured from the time when tilting accelerated to the time of failure. In cases where the slope did not fail but instead stabilized, the time is measured from when tilting decelerated to the time when the slope stabilized.
According to Fig. 2, the order of tilting rate observed with slope deformation varied widely, from 0.0001°/h to 10°/h depending on several factors. The tilting rate tends to increase towards failure with a relatively short time until failure, when a higher tilting rate is observed. The observed tilting rate was >0.01°/h for all the cases in which the slope failed or nearly hour was observed before failure for a tilting rate of 0.1°/h.
Based on the past case studies, it is proposed that when the tilting rate exceeds 0.1°/h a warning of slope failure should be issued, and a precaution issued at a tilting rate of 0.01°/h, taking safety into account. Additionally, this paper explores efforts by the current authors to improve the applicability of the monitoring and early warning system. The miniature tilt sensors are modified from that currently available to be more cost-effective, smaller in size and weight, and simpler to install, maintain and operate. As a result, it is possible to install a larger number of sensors on a given slope, thereby providing greater coverage and higher data density.
Figure 4 illustrates the typical arrangement of two types of proposed sensors, with data transfer pathways also shown. Despite the advantages described above, the new type of miniature tilt sensors has relatively short radio transmission distances (~30 m in non-ideal conditions). They are arranged densely on high-risk areas of a slope, with one conventional tilt sensor unit collecting all the data of each area. The data are transmitted over greater distances (300–600 m) and uploaded to an internet server.

An early warning system of slope failure by multi-point tilt and volumetric water content (Wang et al. 2017)
2 Field Validation of Tilt Sensor for Slope Monitoring
Previously, MEMS tilt sensors have been used at more than 100 sites with slope instability in worldwide. Most of these slopes did not fail, but several of these slopes have failed with and without rainfall and provided important data. Based on these data, the warning threshold has been determined as 0.1°/h. In this section, various cases that have not been reported are discussed.
2.1 Prevention of Secondary Disaster During Restoration of Failed Slope–Fukuoka Pref., Japan
An EWS was successfully used in 2015 in Fukuoka Prefecture, Japan. When this region received heavy rainfall during typhoon No. 11 “Nangka” on July 17 and 18, the slope collapsed and the local road was closed for traffic (Fig. 5). This slope comprises Funi volcanic rock of andesite karst, tuff breccia, and tuff. To safely keep one lane open for traffic during slope restoration, the slope movement was monitored by a set of tilt sensors as shown in Fig. 6. The traffic was intended to stop if the tilt sensor detected an excessive tilting rate during the slope restoration works.

Monitored slope in Fukuoka

Time histories of monitored data at Fukuoka site
Figure 6 shows the plot of the tilt angle and the rainfall data on July 21st and 22nd, shortly after the main slope collapse. The slope was considered to be prone to further failures during the restoration works. From 4 PM to 8 PM on July 21st, that is, immediately after the tilt sensor installation, the tilting rate of 0.083°/h was recorded and continued until 8 AM on July 22nd. Thereafter, the tilting rate accelerated to 0.89°/h, possibly owing to rainfall amounting to approximately 10 mm from 8 AM to 9 AM. Furthermore, owing to further rainfall after 11 AM, the tilting rate sharply increased to 12°/h after 12 PM and the slope finally collapsed at 12:30 PM. Thus, the field monitoring helped control the traffic during the critical period and ensured the safety of human life.
Based on practical experiences at many sites with and without failure, the authors (2015) recommend that a warning and evacuation order should be issued at this tilting rate. Moreover, precautions may be issued at a tilting rate of 0.01°/h to ensure safety, because the time left until failure will be several hours or longer.
In the typical case wherein the surface soil thickness is 150 cm (Fig. 1) in Japan, the 0.01°/h and 0.1°/h tilting rates correspond to the displacement rates of 150 × tan (0.01°) or 150 × tan (0.1°), that is, 0.026 cm/h or 0.26 cm/h, respectively. Hence, it is extremely difficult for GPS, LIDAR, and InSAR to continuously monitor this small movement during heavy rainfall. Therefore, the authors prefer using tilt sensors. The following sections discuss the practical experience acquired at other slope-monitoring sites and used to validate the warning principle described above.
2.2 Practical Tilt Sensor Monitoring in Tokyo
Because of the heavy rain associated with Typhoon No. 21 “Jebi” on October 23, 2018, a part of industrial waste landfill collapsed in Tokyo. Consequently, a part of the collapsed sediment flowed and reached the prefectural road below the slope (Fig. 7).

Monitoring at landfill slope in Tokyo. (a) Plan view and tilt sensor locations. (b) Appearance of slope failure
Accordingly, a temporary protective fence and large sandbags were placed along the road, but drastic measures against the landfill collapse were not implemented. However, it was highly likely that slope failure would reoccur during the rainy season in 2019. Hence, the Environment Bureau of the Tokyo Metropolitan Government installed three extensometers at the edge of the landfill for monitoring. Moreover, three tilt sensors were installed for research purposes.
Figure 8 shows the monitored time history of the cumulative rainfall and the tilt angles. When the rainfall, which cumulatively amounted to 38 mm, occurred before 8 PM on June 15, there was no significant change in the records of tilt sensors K-1 and K-2. Thus, the situation remained relatively stable. A few hours later, in the early morning of June 16, the tilt angles started to increase toward infinity at 5:10 AM (slope collapse). The tilting rate of sensor K-1 reached 0.58°/h (X axis of slope direction) at 4 AM on June 16, and sensor K-2 reached 0.20°/h (X axis of slope direction) at 3:30 AM on the same day. Because the record of the tiltmeters accumulated in the negative direction of the X axis (toward the top of the slope), it is believed that the slope failure mechanism was associated with a circular slip (rotation).

Recorded cumulative rainfall and tilt angles at sensor K-1 and K-2 at the site shown in Fig. 7 (June 15th and 16th)
2.3 Monitoring Slope Failure at Manzawa, Yamanashi, Japan
The Manzawa area in the Yamanashi Prefecture of Japan contains a large-scale reactivation of old slope failures featuring rockfalls that involve the detachment and rapid downward movement of rock.
Because most traditional slope monitoring methods are expensive, difficult to control and may not be suitable for application in this civilian area, the simple and low-cost monitoring system was deployed on a test slope to validate field performance. It should be noted that the research is supported by the Japanese Government during 2014–2017, and the following result that is reported in this paper.
Figure 9 shows the scale of Manzawa slope failure site, and Fig. 10 shows the arrangement of the multi-point tilt sensors and locations, where two types of tilt sensor were used. The arrangement interval of the sensor is designed to 5 m. A total of 66 sets of sensors were deployed.

Area of slope failure at Manzawa site, Japan

Arrangement of the multi-point tilt sensors
The 66 sensor units are divided into three groups, left/middle/right zone, and one data receiver unit and one logger/gateway unit for internet to collect all the data from respective group as shown in Fig. 10. There were eight heavy rainfall events during summer of 2015 shown in Fig. 11, and the tilting rate averaged during each rainfall event is shown in Fig. 12. Distribution of tilting behaviors of two tears result was figured out by multi-point monitoring in Fig. 13 during 2015–2017.

Time histories of movements in rainy days during summer of 2015

Distribution of tilting rates during each rain day during summer of 2015

Distribution of accumulated inclination angle during 2015–2017
2.4 Early Warning by Using Multi-point Monitoring
Wang et al. (2017) proposed an early warning method based on single-sensor monitoring. Recently, the authors have extended the scope of slope monitoring to multi-point monitoring, which can capture both the spatial and temporal behavior of the entire slope. Additionally, multi-point monitoring can avoid erroneous warnings caused by very local slope movement and animal contact, among other causes of error. Thus, the reliability of early warning is improved.
The spacing between multiple sensors must be kept within a reasonable limit (a few meters to a few tens of meters, as in the practical cases discussed in this paper), and a new index of slope movement must be proposed in place of a single sensor’s tilting rate, as in past practical cases.
Certainly, the new index must handle data at all monitoring points. Presently, the new index is assumed to be expressed as follows:
where n is the total number of tilt sensors; Vi is the tilting rate (otherwise denoted as dα/dt) in the slope direction of the ith sensor (°/h); Ai is the area covered by the ith sensor; A0 is the area covered by the entire sensor array; ∂i is the coefficient determined by the geology, geography, soil type, and vegetation conditions at the installation points. Moreover, the ∂i coefficients regard the field conditions, and their values are determined based on the results of geomaterial experiments and the assessment of geologists. Although this issue requires further investigation, ∂i = 1 is currently used in practical situations.
3 Conclusion
The authors have been developing slope failure monitoring and early warning technology. This technology is characterized using MEMS tilt sensors. In earlier versions, monitoring was conducted using a single sensor. However, a multi-sensor approach was implemented in recent development. This paper introduces the most recent development of the authors’ EWS based on data obtained from several sites and their interpretation. The following conclusions were drawn from this study:
-
(1)
In the previous version of the technology, a caution alert was issued when the tilting rate exceeded 0.01°/h, while a warning associated with an evacuation order was issued when the rate exceeded 0.1°/h. These threshold values are based on practical experience and have been validated by recently obtained monitoring results.
-
(2)
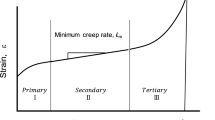
In this paper, various monitoring cases are summarized. The linear relationship between the logarithm of the rate of the tilting angle of the sensors and the logarithm of the time remaining until slope failure was demonstrated. This relationship has an interesting similarity to the relationships suggested by the Monkman-Grant model (Monkman and Grant 1956) and Saito’s rheological interpretation of laboratory soil tests (Saito and Uezawa 1961; Saito 1965).
-
(3)
The recent extension of monitoring to multi-point practice enables a more detailed interpretation of slope behavior in the transient stage and up to the final failure.
As the actual plans, the authors are currently undertaking the National key R&D project of Sino-Japan “Development and demonstration of monitoring and warning technology for the rainstorm induced mountain torrent disaster chain”, which takes the rainstorm-flood-landslide-debris flow disaster chain as the research object and is carrying out through international cooperation and joint research. By using the strength of the Japanese participating units in the field of disaster mechanism research and sensing technology and bring into play the advanced level of the Chinese participating units in communication technology and platform development, the results such as deeply exploring the occurrence and evolution mechanism and developing the key technologies for precise monitoring and dynamic warning of the rainstorm-induced mountain flood disaster chain are expected to be obtained. The project aims to provide scientific and technological support for the mountain flood disaster chain prevention and control, and effectively improve the theoretical and technological level of disaster prevention and reduction research between China and Japan.
References
Lee WF, Liao HJ, Wang CH (2013) Failure analysis of a highway dip slope slide. 4th International Seminar on Forensic Geotechnical Engineering, Bangalore. pp 325–338
Medina-Cetina Z, Nadim F (2008) Stochastic design of an early warning system. Georisk Assess Manage Risk Eng Syst Geohazards 2:223–236. https://doi.org/10.1080/17499510802086777
Monkman FC, Grant NJ (1956) An empirical relationship between rupture life and minimum creep rate in creep rupture tests. Proc Am Soc Test Mater 56(1956):593–620
Saito M, Uezawa H (1961) Failure of soil due to creep. Proceedings of the 5th International Conference on Soil mechanics and Foundation Engineering, vol 1. pp 315–318 (Paris). https://www.issmge.org/uploads/publications/1/40/1961_01_0054.pdf
Saito M (1965) Forecasting the time of occurrence of a slope failure. Proceedings of the 6th International Conference on Soil Mechanics and Foundation Engineering, vol 2. pp 537–541 (Montréal). https://www.issmge.org/uploads/publications/1/39/1965_02_0116.pdf
Sartori M, Baillifard F, Jaboyedoff M, Rouiller JD (2003) Kinematics of the 1991 Randa rockslides (Valais, Switzerland). Nat Hazards Earth Syst Sci, Copernicus Publications on behalf of the European Geosciences Union 3(5):423–433. https://doi.org/10.5194/nhess-3-423-2003
Uchimura T, Towhata I, Wang L, Nishie S, Yamaguchi H, Seko I, Qiao JP (2015) Precaution and early warning of surface failure of slopes by using tilt sensors. Soils Found 55(5):1086–1099. https://doi.org/10.1016/j.sandf.2015.09.010
UN-ISDR (2006) Developing early warning systems, a checklist: Third international conference on early warning (EWC III), Bonn, Germany, 27–29 March 2006. UNISDR. https://www.unisdr.org/2006/ppew/info-resources/ewc3/checklist/English.pdf
Wang L, Nishie S, Su L, Uchimura T, Tao S, Towhata I (2017) Proposed early warning system of slope failure by monitoring inclination changes in multipoint tilt sensors. 19th International conference on soil mechanics and geotechnical engineering, Seoul, South Korea, pp 2215–2218
Acknowledgments
This research was supported by Council for Science, Technology and Innovation, “Cross-ministerial Strategic Innovation Promotion Program (SIP), Infrastructure Maintenance, Renovation, and Management”. (Funding agency: NEDO) of Japan. The National Key R&D Program of China (Grant number 2021YFE0111900), and the National Natural Science Foundation of China (Grant No. 41977171, 41902300).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s)
About this chapter

Cite this chapter
Fukuhara, M. et al. (2023). A Risk Evaluation Method of Unstable Slopes Using Multipoint Tilting Sensors. In: Alcántara-Ayala, I., et al. Progress in Landslide Research and Technology, Volume 2 Issue 1, 2023. Progress in Landslide Research and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-39012-8_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-39012-8_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-39011-1
Online ISBN: 978-3-031-39012-8
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)