
Abstract
Decision-making belongs to one of the most prominent principles in the nerve system of living species. The crucial trade-off between time to decide (speed) and accuracy is essential for a creature to react to environmental stimuli and most importantly, relevant for survival. In-depth studies of coherent motion tasks in primates, based on two-choice decision experiments, led to a profound understanding of neuronal information processing and even bridged the gap to behavioural psychology. Three fundamental processing stages are needed to successfully perform a two-choice decision experiment based on a saccadic eye movement task: the neuronal representation of the sensory signal, the integration of the incoming stimuli and the comparison of the accumulated information to a threshold for a final decision. In accordance to the results of decision-making experiments with primates, an analogue electronic decision-making circuit was developed. Our concept study includes a LED-matrix showing moving light dots (i.e. the tasks screen in primate experiments), an array of photo diodes (i.e. retina of the primate, sensory evidence), a Hassenstein-Reichardt Detector (HRD) based motion detection (i.e. a correlation-type motion detector with a high biological relevance, based on an inhibitory circuit and delay lines) and finally a signal integration circuit. The latter stage represents the decision-making unit and is realised through an inhibitory mutual coupling of the accumulated signals. The entirely analogue circuit is based on integrate and fire relaxation oscillators to mimic firing neurons. We would like to emphasise that the presented real time decision-making system is closely related to biological information pathways in nerve systems. Neither a digital computer nor programming is necessary for decision-making, which might be an interesting approach for real time data processing in autonomous robots.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
The remarkable interaction performance between biological nervous systems and their environment is a result of million years of evolution explained by Darwinism [1]. Indeed, humans, mammals and even simple life-forms as invertebrates are well adapted to permanently changing surroundings and only appropriate reactions ensure survival. Exploring the whole signal pathway from sensory transduction, decision-making neuron ensembles and the final response via motor neurons and muscles is the challenging task in neuroscience. Although a tremendous progress in the understanding of biological nervous systems can be noticed, there still is a considerable lack to understand all principles of information processing from the molecular length scale to the system size. In other words the “brain code” is not yet understood. Consequently, up to today it is impossible to engineer bio-inspired neuromorphic systems, which mimic the signal pathways of living species. The real benefits of biological information processing when it comes to cognitive tasks or pattern recognition together with extreme power efficiency, are still unattainable in their technical pendants. Instead of trying to solve all problems at once, it is much more efficient and pragmatic to mimic specific features of biological nerve systems by focusing on simpler and more visible goals. This strategy has been applied very successfully in the past [2]. We follow the same path. The presented work focuses on central aspects of biological two-alternatives decision-making and its neuromorphic realisation in a compact battery-powered analogue circuitry, which might be of relevance in the field of robotics.
The paper is organized in the following way: starting with an example of decision-making in daily life, models based on psychophysical experiments are shortly summarized. Hereafter, the most relevant model for this work, the leaky competing accumulator, is explained by means of a circuit block diagram. This scheme is transferred to an analogue circuit comprising a Hassenstein-Reichardt motion detector, relaxation type oscillators and delay-lines. Subsequently, experimental results based on moving dot tasks and the performance of the technical decision making system are presented. Finally, similarities and deviations between the bio-inspired electronics and the biological motivated, leaky competing accumulator are discussed.
Studies of decision-making encompass a broad range of research fields such as neuroscience, psychology, statistics, economics and robotics [3]. Essential ingredients of a typical decision making task are illustrated in the comprehensible cartoon in Fig. 1.

[adapted from [4]]
Board game cartoon to illustrate a binary decision task. The yellow pawn could take the left path at the fork, i.e. many steps but a save track towards the goal or the right path, which means less steps but a higher risk because a hold on the red areas will lead to a reset.
In a board game of dice you (represented by the yellow pawn in Fig. 1) may face two possible paths by reaching an intersection and a decision has to be made [4]. The right path is shorter (less steps) compared to the left one and you might be able to reach the goal faster but the path includes risky fields (labeled in red). With bad luck your pawn has to turn back to the start, with the consequence that you might lose the game. Decision-making in our daily live, even under much more serious consequences, is omnipresent. How can a final choice, a decision, be explained in terms of neuronal signal pathways in our brains or in mammals in general? This question is at the heart of decision-making research and is discussed over the last decades [3, 5,6,7,8,9,10]. In addition we would like to emphasize that decision-making is often made under limited time and leads to a tradeoff between decision quality and decision-making time, also called accuracy—speed task [11,12,13].
Two major categories of decision-making models have been developed. The first category applies to complex decisions among valued alternatives [7, 14, 15]. Here the time for a final decision could take minutes or even much longer. The second category, the so-called sequential-sampling type of models, applies to binary or multiple perceptual and memory related tasks [3, 8, 16]. In contrast to the valued-based decisions, the response time is typically in the order of a few seconds. In Fig. 2 the taxonomy of the main decision-making models belonging to the second category (perceptual tasks) are summarized. The models are explained by the simplest decision-making process, i.e. to choose one of two-alternative evidences, let’s say left, L, or right, R. Although neurobiological studies showed that these two model classes for decision-making (valid (not subject in Fig. 2) and perceptual) are linked to some extend [6, 9, 15], we will focus exclusively on two-alternatives perceptual decision-making models. Sequential-sampling models are divided in further subgroups, such as random-walk models and diffusion processes on the one hand and accumulator and counter models on the other hand [8]. For random-walk models as well as for accumulator/counter models it is assumed, that noisy input stimuli are accumulated (integrated) over time until a threshold criterion is reached, representing the final decision. Whereas, in random-walk models evidence is based on accumulating a single total, accumulator/counter models evidences are integrated over two processes separately, i.e. in case of two alternatives a kind of a distinct race towards both of the two thresholds.

Taxonomy of perceptual decision making models. a Random step models. Here the difference (e.g. left L signal evidence—right R signal evidence) between two alternatives is plotted versus time. An upper and lower threshold defines the final decision. Subgroups are the random-walk model and the diffusion type Wiener and Ornstein-Uhlenbeck models; b in accumulator-and counter-type models, the two evidences are separately integrated over time. Nonetheless an inhibitory, cross-wised coupling of the two sensory evidences assures a distinct final decision. Subgroups are the accumulator, the leaky competing accumulator and the Poisson type model [see [8] for more details]. In this work an analog circuit is realized in accordance to the leaky competing accumulator model
After this overview about theoretical models of decision-making, a short survey of neurobiological experiments, in the context of perceptual decision-making with a focus on dot motion discrimination tasks, is presented [8].
Since the first experimental attempt by Newsome et al., visual-saccadic decision-making became one of the most important methods to study visual signal pathways in primates [5, 17, 18]. For example, in so-called coherent motion (two-alternatives) sensory-motor tasks, the experimental procedure is as follows: A dynamic ensemble of dots is displayed on a screen. Some of these dots move randomly, whereas others move either coherently to the left, L, or to the right, R. A trained primate (mostly alert rhesus monkeys) observes the scenario on the screen and makes, after a response time (typically 2 s), a decision, i.e. a saccadic eye movement to the left or right, indicating its choice (decision) in which direction most of the coherent dots previously moved. Simultaneously to the monkey’s decision-making, activities of visual cortical neurons are detected in vivo. A clear correlation between the monkey’s behavior and neuronal activity was found. Later on, other psychophysical experiments e.g., the oddball task and the dot separation task were developed [8] and extended to non-invasive methods, such as MEG (magneto encephalography), fMRI (functional magnetic resonance imaging) and EEG (electro encephalography) [19].
As raised above, decision-making is a biological process, which translates noisy sensory information via perception and cognition into an action. So finally the motor system executes the decision made by higher brain functions and represents the weighting of the nerve system and takes the possible alternatives, set by the environment and its own goals, into account. We would like to emphasize, that reward, in form of stored information in the nerve system, i.e. the former experience of the creature, has also considerable influence in the decision process but is not considered in this work [15, 20].
Which neuronal correlates are responsible for decision-making? For two-choice discriminator (saccadic eye movement) tasks, it becomes clear, that oculomotor areas including the middle temporal area (MT also called V5), lateral interparietial area (LIP), the frontal eye field (FEF) and the superior colliculus (SC), are involved. More details about the interacting neuronal areas can be found in Refs. [8, 21,22,23]. In Fig. 3 these areas and their approximate locations in a non-human primate brain are depicted schematically.

Areas of the oculomotor system involved in decision-making are exemplarily shown in a sketched brain of a primate. For decision making neuronal correlates such as, the middle temporal area (MT also called V5), lateral interparietal area (LIP), the frontal eye field (FEF) and the superior colliculus (SC) are involved
It is believed that neurons in the area LIP mediate a simple decision process by integrating the sensory evidences over time towards a threshold, i.e. a criterion to commit one of the two possibilities. In other words, the decision process is a race between two competing alternatives. Binary, opposite movements in decision making are simultaneously elusive because a single motor response is required. Hence, models based on not fully independent sensory systems, including a mutual inhibitory component between the two signal pathways, were developed. The principles reflecting essential stages of the saccadic eye movement experiment are shown in Fig. 4a [24, 25]. A primate is facing a display to perform the coherent motion task. The behavioral task is illustrated in the same figure. Neuronal direction-sensitive motion detectors in the primate brain extract the visual strength of the moving dot ensembles. In more detail, the signals for dots, moving to the left and to the right are accumulated (integrated over time) by combined neurons. Both signal pathways are coupled via inhibitory neurons. Finally the output neurons indicate the decision and trigger motor neurons for the final saccadic eye movement (target T\(_1\)—left or target T\(_2\)—right).

a Sketch of the biological perceptual decision-making experiment. The primate facing a dot display performs a two-alternatives discrimination task defined by an ensemble of moving dots. The final saccadic eye movement reflects the decision whether the majority of the dots has been moving to the left or to the right; b block diagram of the biologically inspired perceptual decision making process of a two-alternatives discriminator task. From left to right and in correspondence to the biological pendant the following units are shown: LED (8 \(\times \) 8) matrix to define computer-controlled moving dot tasks, a photo diode receptor unit as a retina pendant (a 5 \(\times \) 5 matrix), a correlation-type Hassenstein-Reichardt motion detector (HRD), two integrating units for the two pathways, cross-wised linked inhibitory neurons and two accumulation units. The corresponding biological units, the MT areal and the LIP-areal are marked [7, 26]
In accordance to the behavioral task as shown in Fig. 4a, a neuromorphic circuitry was build and the corresponding circuit design is shown in Fig. 4b and will be explained hereinafter.
2 Materials and Methods
2.1 A Bio-inspired Block Diagram
The essential parts (left to right in Fig. 4b) are a computer controlled LED-matrix (representing the task screen in biological experiments), an array of photo diodes (i.e. retina of the primate, sensory evidence), motion detection (i.e. a correlation-type motion detector with a high biological relevance) based on an inhibitory circuit and delay lines) and finally a signal integration circuit for decision-making. The LED-display is connected to a digital computer via a microcontroller interface, in this way different computer-controlled tasks can be realized on the display. The motion detector is based on the Hassenstein-Reichardt motion detector (HRD) model, which was developed in the 1950‘s to explain signal pathways in insects, such as the fly [27,28,29,30,31,32]. The concept was further developed by Barlow and Levick [33]. Before continuing with the entire decision making system, the HRD will be described in more detail in sequel.
2.2 The Hassenstein-Reichardt Motion Detector (HRD)
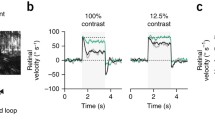
The HRD is a correlation-type system and comprises in a mirror-like fashion two signal pathways including the photoreceptors P\(_{1,2}\), two delay lines \(\tau _{1,2}\) two (non-linear elements) NL\(_{1,2}\) (e.g. multipliers or a vetogate) [27, 33,34,35]. Finally the signals of the two pathways are subtracted. To illustrate the function of the HRD, an object, O, moving with a positive velocity (i.e. from left to right) is shown in Fig. 5a. At first the photoreceptor P\(_1\) detects a visual signal if the object passes by. The signal is split into two parts, the first serves as the input for the delay line \(\tau _1\), while the second part of the signal represents the input of the non-linear element NL\(_2\). The qualitative steady-state response of a HRD is shown schematically in Fig. 5b. For a static object (v = 0 cm/degree) the output is zero. For objects moving either from left to right or vice versa, the HRD delivers a maximum/minimum response signal, respectively. This allows an insect (such as Chlorophanus or Drosophila) to distinguish between objects with different directions of motion. For larger absolute velocities beyond the maximum/minimum of the object, the signal response gradually vanishes for both directions.

a Principle components of a HRD, comprising two photoreceptors, two delay lines (\(\tau _{1,2}\) two non-linear elements NL\(_{1,2}\)). The information pathways are cross-linked; b schematic response curve of a HRD
A more detailed layout of the developed HRD is shown in Fig. 6. The visual input received from the five photo receptors (photo diodes) is connected to five oscillator units Os (layer I). The first layer is connected via five delay lines (marked by \(\tau \)) to the outputs which are further connected to another layer II comprising six oscillators. One part of layer II (the three oscillators marked in red) and the other part of layer II (marked in green) are indicators for motions from left to right and vice versa, respectively. It is worth to mention that one path in the middle is split into two subsequent oscillators on each site (one red and one green). The relaxation type oscillators offer the opportunity for excitatory and inhibitory inputs to realize pivotal neuronal functionalities and will be explained in more detail below [4, 36].

View graph of the HRD circuit with an input stage comprising five photoreceptors, five input oscillators (layer I) and five delay lines (layer II). Six output oscillators (layer II) are used to indicate the decision between the two-alternatives (L or R). The red and green colored arrows correspond to object movements from left to right or right to left, respectively. On the right hand site a graphical symbol of the HRD is shown
2.3 The Relaxation-Type Oscillator
A spiking neuron can be represented by an oscillator model [4, 37]. How have the oscillators and the delay-lines been realized electronically? The circuit diagram of the implemented relaxation-type oscillator including the excitatory (MOSFET M\(_e\)) and inhibitory (MOSFET M\(_i\)) coupling scheme and that of a delay-line are shown schematically in Fig. 7a and b, respectively.

a Circuit scheme of a programmable unijunction transistor (PUT) based oscillator. Two MOSFETs, Me and Mi, are connected to the gate resistance RG and mimic either the biological motivated excitatory (via M\(_e\)) or inhibitory (via M\(_i\)) coupling scheme of neurons. Both transistors are shown within the grey box. The LED between the cathode of the PUT and ground visualizes low-frequency oscillations (<20 Hz). A pulse at the cathode C of the PUT can be used to trigger other oscillators or delay-lines (signal out). The photo diode parallel to RG represents one pixel of the receptor matrix (input oscillators in layer I in Fig. 6b). Delay-line based on a multivibrator [38]. The delay can be adjusted by the external resistor R\(_{M1}\) and the external capacitor C\(_{M1}\) of the multivibrator

a Schematic of the np regions and terminals of the PUT 2N 6027 [39]. Essential is the internal connection of the n\(_1\) and p\(_2\) regions to realize non-equilibrium charge carrier effects, necessary for a negative differential resistance region (NDR) in the \(I-V\) curve [40]. b \(I-V\) curves measured for positive bias voltages between the anode and cathode. The negative differential resistance regime is clearly visible

Upper view graph: Characteristic relaxation-type voltage-time traces of the \(V_C\) (corresponds to knot 1 in Fig. 7) which represents the charging of the capacitor via the resistor R. Lower view graph: When the threshold voltage \(V_{th}\) (defined by the voltage divider \(R_1\), \(R_G\) and the bias voltage) is reached, the PUT fires (relaxes), which results in a short voltage drop at the gate terminal \(V_G\) (corresponds to knot 2 in Fig. 7). For this particular set of parameters the oscillator frequency was approximately 25 Hz
The relaxation-type oscillators consist of a programmable unijunction transistor (PUT). (ON Semiconductor, Ebers, 1952, Floyd 1999). PUTs belong to the class of silicon rectifier devices and have four (npnp) alternating regions (see Fig. 8a). By applying a bias voltage between the anode and cathode, the PUT exhibits an \(I-V\) curve with a negative differential resistance region as shown in Fig. 8b. Programmable means that the gate Voltage, VG, applied to the gate terminal, modifies the oscillator frequency. The relaxation-type oscillator (see Fig. 7a), works as follows: The capacitor C is charged through the resistor R leading to the voltage \(V_C\) at knot 1. By reaching the voltage \(V_{th}\) = \(V_G\) + 0.7 V defined by the voltage divider \(R_G\), \(R_1\) and the bias voltage VB, the PUT “fires”, i.e. the charge of the capacitor C is discharged via the cathode terminal to ground and hence the cycle perpetually repeats. Typical voltage traces of \(V_C\) of the capacitor C (at knot 1) and the gate terminal \(V_G\) (at knot 2) are depicted in Fig. 9. For low frequencies (<20 Hz) a LED between the cathode and ground (and parallel to the cathode resistor \(R_C\)) can be used to visualize the oscillations. An extended circuit was used to modify dynamically the gate resistance \(R_G\) and mimic excitatory and inhibitory properties of neurons. For those functions, two MOSFETs were integrated, one (M\(_e\)) which induces the oscillations (excitatory) and another (M\(_i\)) which suppresses the oscillations. The photo diode was implemented for the oscillators shown in layer I (Fig. 6). This input oscillators in layer I act as an opto-electrical interface and emulate the function of a the retina. The oscillators of layer I start to oscillate only, if the illuminated photo diodes receive a light stimuli whose intensity is high enough. We would like to emphasize, that for the basic version of the PUT (i.e. without the photo diode and the MOSFETs Me and Mi at the gate terminal, Fig. 7a), the parameters were chosen in a way to suppress oscillations. This is the case when the voltage \(V_C\) does not reach the threshold voltage Vth of the PUT. Sole in the particular case where the external stimuli is large enough oscillations are observable. This stimuli is either optical for layer I or electrical for all other oscillators at the excitatory input (M\(_e\)) in the absence of any inhibitory signal (M\(_i\)). Then the relaxation pulses of the oscillators are easily visible via the LED between the PUT’s cathode and ground.

Photograph of the entire decision making system. The LED display was face-to face with the 5 \(\times \) 5 five photo receptor array. The circuit consists of five main subgroups: (1) LED-Matrix controlled via Arduino, (2) Layer I Oscillators, (3) HRD, (4) Layer II - Outcome HRD, (5) Accumulation Stage
2.4 LED-Matrix Chaser as a Dot-Task Display
In Fig. 10 a picture of the entire decision making circuit is shown. The LED-matrix was face-to face with the 5 \(\times \) 5 five photo receptor array. Since the matrix corresponds not one-to-one (8 \(\times \) 8 LED to 5 \(\times \) 5 photo receptors), only the inner area of it was used as an active part. For the microcontroller interface, an Arduino was used. To program the device it was connected to an laptop using a USB. For programming, tools of the Arduino software were used. For a typical dot-task presented to our decision-making system, the LED matrix was programmed as light chasers for each column. This means for example that for three adjacent LED columns the LEDs simultaneously chased from left to right and for the other two columns vice versa. The frequency, i.e. the repetition time for one cycle in a column was ca. 1 s. Under this imbalance condition of moving dots (more left to right then right to left) and similar to physiological motivated dot tasks, we tested the decision-making capability of the system.

Entire layout of the biologically-inspired perceptual decision making circuit. At the stages S\(_1\) to S\(_4\) signal traces were acquired

a The five voltage versus time traces of layer I oscillators connected to one column of the photo diode array (see Fig. 6). The pattern represents the LED light chase in one row; b the six voltages traces of the Hassenstein-Reichardt detector (HRD) (see Fig. 6, layer II). c Layout of the photo-diode array of Layer I. The voltage traces of oscillators connected to the marked diodes are depicted in a (Os\(_{ij}\))
3 Results and Discussion
3.1 Entire Electronic Decision Making System
The aforementioned components of a technical decision making system are summarized for one column of photo-detectors and sketched in Fig. 11. The two outputs of each HRD (representing L and R) are connected to the left and right accumulation stage. Each accumulation stage consists of one capacitor integrating the evidence for the right and left direction of motion, respectively. The diodes between the HRDs and the accumulation stages suppress coupling between the HRD oscillators and the discharging of the two capacitors. The voltages (\(V_L\) and \(V_R\)) of the two capacitors \(C_L\) and \(C_R\) are used to compare the two evidences. To indicate the final decision the voltages are encoded by two indication oscillators. To get the inhibitory coupling scheme as shown in Fig. 4, the encoded \(V_L\) and \(V_R\) serve as inhibitory inputs for the right and left indication oscillators, respectively. This assures the essential mutual influence of the two evidences as described by the leaky competing accumulator model (see Fig. 2).
3.2 Result of Decision-Making
To illustrate the function of our decision-making system, including the voltage traces at different stages, we defined a clear and simple task via the LED matrix. Only one column was used for the light chase and programmed in a way, that the direction of the light stimulus alternates between left to right and right to left establishing an symmetric input. The complete period was approximately 1 s. For this task the following voltage traces were measured at the stages S\(_1\) to S\(_4\) as labeled in Fig. 11. The results are shown in Fig. 12. In Fig. 12a the encoded light stimulus at the oscillation layer I (stage S\(_1\)) , i.e. the input for the HRDs is shown. The five spike sequences represent the sensory transformation of the optical pattern. In more detail, the sequential spike arrangement reflects the chronology of the programmed chasing light cascade which served as inputs for the correlation-type motion detectors. The output after the HRDs is depicted in Fig. 12b (at stages S\(_2\)) exhibits the two motion directions.
In Fig. 13 the voltage traces at S\(_3\) and S\(_4\) are depicted. S\(_3\) represents the charge state of each capacitor. The time evolutions in the upper diagram reflect the accumulation of evidence during a decision process. At the beginning of the task (t = 0 s) the two signals increase simultaneously, because the system recognized evidence for the two alternatives. In the inset the time interval up to 2 s is enlarged. The race of the two signals is clearly visible. For times larger than 0.7 s, evidence 1 (black) increases, whereas evidence 2 (red) decreases. The later is due to the negative feedback, established by the discharge MOSFET at the accumulation stage S\(_3\) and reflects the implemented inhibitory function. We like to emphasize the similarity of these results to those, predicted in the biological motivated accumulator and counter models shown in Fig. 2b. The charge state is encoded in the firing rate detected at the cathodes of the two oscillators at stage S\(_4\). This ensures a counteracting response, i.e. one evidence increases at the expenses of the other evidence during decision-making.

Typical results of the decision making circuitry for a dot discrimination task. In the upper diagram the voltage versus time traces of stage S3, which correspond to the charge state of the two capacitors (see Fig. 11), are shown. Each trace represents an indicator for the strength, i.e. the number of dots moving to the left (movement R to L, black line) or right (movement L to R, red line) direction. The lower diagram depicts the encoded information in form of firing rates of the two output oscillators, used as a negative feedback
4 Conclusion
In summary, we presented a bio-inspired analogue circuit for a two-alternatives perceptual moving dot task, known from physiological based discrimination experiments. Pivotal neuronal correlates of oculomotor areas in primates, such as the middle temporal area (MT also called V5), lateral interparietal area (LIP), the frontal eye field (FEF) and the superior colliculus (SC) known to be involved in decision-making discriminators task, were mimicked by an analogue circuit. Based on the principle of a Hassenstein-Reichardt motion detector, relaxation-type oscillators, delay-lines, a LED-matrix and a photo-diode matrix, simple two-alternatives decision tasks were solved by our system. The circuit processes in real time and no computer is involved (we exclude here the laptop/microcontroller used to define the motion task). Rather than developing the system to break the world record in decision-making performed by a technical system, we focused on a closely bio-inspired version. Fundamental principles such as spiking neurons, inhibitory and excitatory coupling schemes and the Hassenstein-Reichardt motion detector were emulated.
In the future it might be possible to include a reward in form of memristive devices which change their state. Moreover studies as the system response-time versus the task difficulty can be performed [41, 42]. We hope that our approach makes a relevant contribution to the field of robotics based on neurobiological principles.
References
Shanahan, T.: The Evolution of Darwinism: Selection, Adaptation and Progress in Evolutionary Biology. Cambridge University Press (2004)
Ignatov, Marina, Ziegler, Martin, Hansen, Mirko, Petraru, Adrian, Kohlstedt, Hermann: A memristive spiking neuron with firing rate coding. Front. Neurosci. 9, 376 (2015)
Gold, J.I., Shadlen, M.N., et al.: The neural basis of decision making. Annu. Rev. Neurosci. 30(1), 535–574 (2007)
Gerstner, W., Kistler, W.M., Naud, R., Paninski, L.: Neuronal Dynamics: From Single Neurons to Networks and Models of Cognition. Cambridge University Press (2014)
Newsome, W.T., Britten, K.H., Movshon, J.A.: Neuronal correlates of a perceptual decision. Nat. 341(6237), 52–54 (1989)
Schall, J.D.: Neural basis of deciding, choosing and acting. Nat. Rev. Neurosci. 2(1), 33–42 (2001)
Glimcher, P.W.: The neurobiology of visual-saccadic decision making. Annu. Rev. Neurosci. 26(1), 133–179 (2003)
Smith, P.L., Ratcliff, R.: Psychology and neurobiology of simple decisions. Trends Neurosci. 27(3), 161–168 (2004)
Shadlen, M.N., Kiani, R.: Decision making as a window on cognition. Neuron. 80(3), 791–806 (2013)
Cassey, P., Heathcote, A., Brown, S.D.: Brain and behavior in decision-making. PLoS Comput. Biol. 10(7), e1003700 (2014)
Wickelgren, W.A.: Speed-accuracy tradeoff and information processing dynamics. Acta Psychol. 41(1), 67–85 (1977)
Uchida, N., Mainen, Z.F.: Speed and accuracy of olfactory discrimination in the rat. Nat. Neurosci. 6(11), 1224–1229 (2003)
Rinberg, Dmitry, Koulakov, Alexei, Gelperin, Alan: Speed-accuracy tradeoff in olfaction. Neuron. 51(3), 351–358 (2006)
Luce, R.D., et al.: Response Times: Their Role in Inferring Elementary Mental Organization, no. 8. Oxford University Press on Demand (1986)
Sugrue, L.P., Corrado, G.S., Newsome, W.T.: Choosing the greater of two goods: neural currencies for valuation and decision making. Nat. Rev. Neurosci. 6(5), 363–375 (2005)
Salzman, C.D., Newsome, W.T.: Neural mechanisms for forming a perceptual decision. Sci. 264(5156), 231–237 (1994)
Zeki, S.M.: Functional organization of a visual area in the posterior bank of the superior temporal sulcus of the rhesus monkey. J. Physiol. 236(3), 549–573 (1974)
Wurtz, R.H., Goldberg, M.E.: Activity of superior colliculus in behaving monkey. 3. cells discharging before eye movements. J. Neurophysiol. 35(4), 575–586 (1972)
Heekeren, H.R., Marrett, S., Bandettini, P.A., Ungerleider, L.G.: A general mechanism for perceptual decision-making in the human brain. Nat. 431(7010), 859–862 (2004)
Nichols, M.J., Newsome, W.T.: The neurobiology of cognition. Nat. 402(6761), C35–C38 (1999)
Shadlen, M.N., Newsome, W.T.: Neural basis of a perceptual decision in the parietal cortex (area lip) of the rhesus monkey. J. Neurophysiol. 86(4), 1916–1936 (2001)
Mazurek, M.E., Roitman, J.D., Ditterich, J., Shadlen, M.N.: A role for neural integrators in perceptual decision making. Cereb. Cortex. 13(11), 1257–1269 (2003)
Sommer, M.A., Wurtz, R.H.: Brain circuits for the internal monitoring of movements. Annu. Rev. Neurosci. 31, 317 (2008)
Shadlen, M.N., Britten, K.H., Newsome, W.T., Movshon, J.A.: A computational analysis of the relationship between neuronal and behavioral responses to visual motion. J. Neurosci. 16(4), 1486–1510 (1996)
Usher, M., McClelland, J.L.: The time course of perceptual choice: the leaky, competing accumulator model. Psychol. Rev. 108(3), 550 (2001)
Shadlen, M.N., Newsome, W.T.: Motion perception: seeing and deciding. Proc. Natl. Acad. Sci. 93(2), 628–633 (1996)
Hassenstein, Bernhard, Reichardt, Werner: Systemtheoretische analyse der zeit-, reihenfolgen-und vorzeichenauswertung bei der bewegungsperzeption des rüsselkäfers chlorophanus. Zeitschrift für Naturforschung B 11(9–10), 513–524 (1956)
Reichardt, W.: Autocorrelation, a principle for evaluation of sensory information by the central nervous system. In: Symposium on Principles of Sensory Communication 1959, pp. 303–317. MIT press (1961)
Zanker, J.M., Srinivasan, M.V., Egelhaaf, M.: Speed tuning in elementary motion detectors of the correlation type. Biol. Cybern. 80(2), 109–116 (1999)
Borst, Alexander: Correlation versus gradient type motion detectors: the pros and cons. Philos. Trans. R. Soc. B Biol. Sci. 362(1479), 369–374 (2007)
Joesch, M., Schnell, B., Raghu, S.V., Reiff, D.F., Borst, A.: On and off pathways in drosophila motion vision. Nat. 468(7321), 300–304 (2010)
Plett, Johannes, Bahl, Armin, Buss, Martin, Kühnlenz, Kolja, Borst, Alexander: Bio-inspired visual ego-rotation sensor for MAVs. Biol. Cybern. 106(1), 51–63 (2012)
Barlow, H.B., Levick, W.R.: The mechanism of directionally selective units in rabbit’s retina. J. Physiol. 178(3), 477 (1965)
Hassenstein, Bernhard: Ommatidienraster und afferente bewegungsintegration. Zeitschrift für vergleichende Physiologie 33(4), 301–326 (1951)
Borst, Alexander, Helmstaedter, Moritz: Common circuit design in fly and mammalian motion vision. Nat. Neurosci. 18(8), 1067–1076 (2015)
Van Vreeswijk, C., Abbott, L.F., Bard Ermentrout, G.: When inhibition not excitation synchronizes neural firing. J. Comput. Neurosci. 1(4), 313–321 (1994)
Izhikevich, E.M.: Dynamical Systems in Neuroscience. MIT press (2007)
Maini, A.K.: Digital Electronics: Principles, Devices and Applications. John Wiley & Sons (2007)
2n6027, 2n6028—programmable unijunction transistor. http://solarbotics.net/library/datasheets/2N602X.pdf. Accessed 19 Sept 2022
Ebers, J.J.: Four-terminal pnpn transistors. Proc. IRE. 40(11), 1361–1364 (1952)
Hanks, T., Kiani, R., Shadlen, M.N.: A neural mechanism of speed-accuracy tradeoff in macaque area lip. Elife. 3, e02260 (2014)
Heitz, R.P., Schall, J.D.: Neural mechanisms of speed-accuracy tradeoff. Neuron. 76(3), 616–628 (2012)
Acknowledgements
This is a short text to acknowledge the contributions of specific colleagues, institutions, or agencies that aided the efforts of the authors. Financial support by the German Research Foundation through FOR 2093 is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this chapter

Cite this chapter
Birkoben, T., Hansen, M., Ignatov, M., Ziegler, M., Kohlstedt, H. (2024). A Bio-inspired Perceptual Decision-Making Circuit Based on the Hassenstein-Reichardt Direction Detector. In: Ziegler, M., Mussenbrock, T., Kohlstedt, H. (eds) Bio-Inspired Information Pathways. Springer Series on Bio- and Neurosystems, vol 16. Springer, Cham. https://doi.org/10.1007/978-3-031-36705-2_13
Download citation
DOI: https://doi.org/10.1007/978-3-031-36705-2_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-36704-5
Online ISBN: 978-3-031-36705-2
eBook Packages: EngineeringEngineering (R0)