
Abstract
The reversal of Hartmann’s procedure was first described by Boyden et al., who reported on the reversal of six colostomies, while the first laparoscopic approach to Hartmann’s reversal (HR) was described by Anderson et al. The minimally invasive approach seemed to be superior to open surgery, but the challenge of laparoscopy remained adhesiolysis, which caused a variable rate of conversions ranging from 0% to 50%. In this scenario, the introduction of the robotic approach seemed to overcome some of the technical difficulties of laparoscopy. The stable 3D vision camera and the EndoWrist technology decrease the technical challenges of adhesiolysis, reducing the need for conversion. Literature data on the robotic approach to HR are scarce and anecdotal. The only cohort study on the application of robotic surgery to HR was performed by Giuliani et al., who reported on the results of the robotic approach in 24 patients, recording no major complications. This chapter explains the technical details of robotic HR and reviews the current literature on the topic.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Hartmann’s procedure was first introduced in 1920 by Hartmann [1], who performed a closure of the distal rectal stump and a descending colostomy after rectal cancer resection. The first reversal of a Hartmann’s procedure was described by Boyden et al. [2], who reported on the reversal of six colostomies.
Since its introduction, the Hartmann’s procedure has become the gold standard treatment for many procedures especially in emergency settings, such as complicated diverticulitis, perforated or obstructive colon/rectal cancer, obstructive colonic Crohn’s disease or trauma-related colonic perforation. The Hartmann’s procedure should be considered the gold standard procedure in cases in which creating an anastomosis is not prudent. Being usually performed in an emergency setting, it is often carried out as open surgery and consequently creates many intra-abdominal adhesions, which complicate subsequent colostomy closure and restoration of colonic continuity. As a result, also the reversal of Hartmann’s procedure (Hartmann’s reversal, HR) tends to be performed as an open approach, because, when done by laparoscopy, the conversion rate remains high.
Given this scenario, the introduction of robotics seemed to overcome some of the technical difficulties of laparoscopy. The stable 3D vision camera and the EndoWrist technology reduce the technical challenges of laparoscopic adhesiolysis, reducing the need for conversion. Indeed, the use of straight rigid laparoscopic instruments makes it very difficult to reach and lyse adhesions in the deep pelvis or at the abdominal wall, and for this reason the HR procedure could be considered a suitable field of application of robotic surgery.
2 Literature Review on the Minimally Invasive Approach to Hartmann’s Reversal
In the last 20 years several studies have demonstrated the feasibility of the minimally invasive approach to HR. The first case of laparoscopic HR was reported by Anderson et al. [3], who described the technique and the postoperative outcomes. The largest comparative study of laparoscopic and open HR was performed by Pei et al. in 2017 [4]. The authors recorded data for over 11,000 patients undergoing HR, assessing that open HR surgery had significantly higher complication rates than laparoscopy, as well as longer operative time and length of stay. Similar results were obtained by other authors, all of whom confirmed the superiority of laparoscopy over laparotomy also in terms of anastomotic leakage rate [5,6,7,8,9,10,11,12,13]. However, the challenge of the laparoscopic approach remained adhesiolysis, which caused a variable rate of conversion ranging from 0% to 50% [7, 14].
Recently, a meta-analysis by Chavrier et al. [15] combined the results of 23 studies comparing open and laparoscopic HR. The results confirmed the trends reported in the current literature. In fact, by pooling together 3139 laparoscopic HR and 10,325 open HR, the authors assessed that, compared with the open approach, the laparoscopic approach was significantly associated with a decreased rate of revision surgery, anastomotic leakage, postoperative morbidity, intra-abdominal or wound abscess and postoperative ileus, while mortality was comparable between the two types of procedure. However, a major limitation of the meta-analysis was that all the studies were retrospective, only four studies were case-matched comparisons and only one study was a propensity score-matched comparison; no randomized controlled trial has been performed to confirm these advantages.
3 State of the Art on the Robotic Approach to Hartmann’s Reversal
The literature data on the robotic approach to HR are scarce and anecdotal.
The first paper on robotic HR was published by de’ Angelis et al. [16], who reported on the case of an 84-year-old man with a colostomy after a Hartmann’s procedure for a Hinchey IV diverticulitis. The authors described the technical details of the technique, highlighting the importance of robotic assistance during the adhesiolysis. The authors concluded that the robotic HR procedure could be considered safe, feasible, and valuable.
Only one cohort study can be found in the literature. This was performed by Giuliani et al. [17] in 2020 and describes the technical aspects of robotic HR and the results obtained in the authors’ first 24 patients. An important finding was the absence of conversion to the open or laparoscopic approach, confirming the efficacy of robotic assistance during the adhesiolysis. No major complications were recorded by the authors, while three minor complications were noted.
The most recent study on robotic HR was performed in 2021 by Bardakcioglu [18], who reviewed the literature and described the technical phases of the procedure.
Analyzing the current literature, no randomized controlled trials, comparative studies or large cohort study have been proposed or performed, so that the perceived advantages of the robotic approach need to be further confirmed.
4 Surgical Technique
The patient is positioned in the lithotomy position with the arms alongside the body, with a 15°–20° Trendelenburg position and about 20° right tilt.
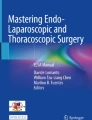
After the induction of pneumoperitoneum by a Veress needle introduced at Palmer’s point, four robotic ports are placed along a straight diagonal line connecting the anterior superior iliac spine and the right subcostal margin. The distance between the ports is about 6–8 cm and the two most lateral ports (arm 1 and 4) are positioned at least at 2 cm from the bony structures (Fig. 17.1). We usually adopt three 8-mm ports for the robotic instruments and one 12-mm port in which we introduce the robotic stapler. A 12-mm assistant port is placed in the right flank for conventional laparoscopic instrumentation to be used by the assistant surgeon.

Position of the ports during a robotic Hartmann’s reversal (ASS, assistant port)
For this procedure, we usually employ the following instruments:
-
Prograsp forceps (arm 1)
-
bipolar fenestrated forceps (arm 2)
-
30° robotic scope (arm 3)
-
permanent cautery hook (arm 4).
In the case of obese patients we use a high energy device (vessel sealer or harmonic scalpel, Intuitive) in arm 4.
The first phase of the procedure is adhesiolysis, performed to isolate the colostomy, mobilize the small-bowel loops in the pelvis and to identify the rectal stump. Adhesiolysis is performed with a combination of blunt and sharp dissection using the bipolar forceps and the monopolar hook.
After isolation of the colostomy, the proximal colic stump is resected with a robotic 60-mm stapler (SureForm, blue cartridge). The proximal stump is completely mobilized by the mobilization of the splenic flexure, by dissection of the splenocolic and phrenicocolic ligaments and by separation of the Toldt’s and Gerota’s planes under the inferior mesenteric vein. When needed, mobilization is completed by coloepiploic detachment. Adequate vascularization of the colonic stump is ensured with the indocyanine green test.
After mobilization of the proximal stump, this is exteriorized by a mini-Pfannenstiel incision and the 31-mm anvil of the end-to-end stapler is secured to the colonic stump. An end-to-end Knight-Griffen colorectal anastomosis is then performed and a hydropneumatic leak test is done to assess its integrity. Usually, a pelvic drain is left in place. The procedure ends with extraction of the ports, direct visualization and closure of the port sites, mini-Pfannenstiel incision, and ostomy site.
5 Conclusions
From a clinical point of view, robotic technology seems to facilitate the approach to Hartmann’s reversal by improving the visualization and dissection capabilities during adhesiolysis in a complex abdomen. The main advantages of the robotic approach seem to be the lower rate of conversions in comparison to the standard laparoscopic approach. However, although the current literature seems to show favorable outcomes for the robotic technique, the results are still scarce and no clear advantage of this approach can be defined as yet.
References
Sanderson ER. Henri Hartmann and the Hartmann operation. Arch Surg. 1980;115(6):792–3.
Boyden AM. The surgical treatment of diverticulitis of the colon. Ann Surg. 1950;132(1):94–109.
Anderson CA, Fowler DL, White S, Wintz N. Laparoscopic colostomy closure. Surg Laparosc Endosc. 1993;3(1):69–72.
Pei KY, Davis KA, Zhang Y. Assessing trends in laparoscopic colostomy reversal and evaluating outcomes when compared to open procedures. Surg Endosc. 2018;32(2):695–701.
Brathwaite S, Kuhrt M, Yu L, et al. Retrospective evaluation of laparoscopic versus open Hartmann’s reversal: a single-institution experience. Surg Laparosc Endosc Percutan Tech. 2015;25(5):e156–8.
Chouillard E, Pierard T, Campbell R, Tabary N. Laparoscopically assisted Hartman’s reversal is an efficacious and efficient procedure: a case control study. Minerva Chir. 2009;64(1):1–8.
de’ Angelis N, Brunetti F, Memeo R, et al. Comparison between open and laparoscopic reversal of Hartmann’s procedure for diverticulitis. World J Gastrointest Surg. 2013;5(8):245–51.
Faure JP, Doucet C, Essique D, et al. Comparison of conventional and laparoscopic Hartmann’s procedure reversal. Surg Laparosc Endosc Percutan Tech. 2007;17(6):495–9.
Horesh N, Lessing Y, Rudnicki Y, et al. Comparison between laparoscopic and open Hartmann’s reversal: results of a decade-long multicenter retrospective study. Surg Endosc. 2018;32(12):4780–7.
Kwak HD, Kim J, Kang DW, et al. Hartmann’s reversal: a comparative study between laparoscopic and open approaches. ANZ J Surg. 2018;88(5):450–4.
Maitra RK, Pinkney TD, Mohiuddin MK, et al. Should laparoscopic reversal of Hartmann’s procedure be the first line approach in all patients? Int J Surg. 2013;11(9):971–6.
Mazeh H, Greenstein AJ, Swedish K, et al. Laparoscopic and open reversal of Hartmann’s procedure – a comparative retrospective analysis. Surg Endosc. 2009;23(3):496–502.
Ng DCK, Guarino S, Yau SLC, et al. Laparoscopic reversal of Hartmann’s procedure: safety and feasibility. Gastroenterol Rep (Oxf). 2013;1(2):149–52.
Studer P, Schnüriger B, Umer M, et al. Laparoscopic versus open end colostomy closure: a single-center experience. Am Surg. 2014;80(4):361–5.
Chavrier D, Alves A, Menahem B. Is laparoscopy a reliable alternative to laparotomy in Hartmann’s reversal? An updated meta-analysis. Tech Coloproctol. 2022;26(4):239–52.
de’ Angelis N, Felli E, Azoulay D, Brunetti F. Robotic-assisted reversal of Hartmann’s procedure for diverticulitis. J Robot Surg. 2014;8(4):381–3.
Giuliani G, Formisano G, Milone M, et al. Full robotic Hartmann’s reversal: technical aspects and preliminary experience. Color Dis. 2020;22(11):1734–40.
Bardakcioglu O. Robotic reversal of Hartmann’s procedure. Clin Colon Rectal Surg. 2021;34(5):325–7.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License (http://creativecommons.org/licenses/by-nc-nd/4.0/), which permits any noncommercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if you modified the licensed material. You do not have permission under this license to share adapted material derived from this chapter or parts of it.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2024 The Author(s)
About this chapter

Cite this chapter
Milone, M., Manigrasso, M., De Palma, G.D. (2024). Robotic Hartmann’s Reversal. In: Ceccarelli, G., Coratti, A. (eds) Robotic Surgery of Colon and Rectum. Updates in Surgery. Springer, Cham. https://doi.org/10.1007/978-3-031-33020-9_17
Download citation
DOI: https://doi.org/10.1007/978-3-031-33020-9_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-33019-3
Online ISBN: 978-3-031-33020-9
eBook Packages: MedicineMedicine (R0)