
Abstract
The chapter presents key findings from the “national comparative study” segment --- a work undertaken under the auspices of the European Union (EU) Horizon 2020 project titled Autonomous Robotic Inspection and Maintenance on Ship Hulls and Storage Tanks (BUGWRIGHT2) under grant agreement no. 871260. It illustrates, using the case study of autonomous operations, as well as primary data collected through sixty (60) in-depth semi-structured interviews with maritime administrations, policy advisors, classification societies, service providers, and subject matter experts—lessons learned from ongoing developments and usage of remote inspection techniques (RIT) for hull inspection from six leading maritime nations: United States of America (US), Canada, the Republic of Singapore (Singapore), the People’s Republic of China (China), the Kingdom of the Netherlands (Netherlands), and the Kingdom of Norway (Norway).
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
- Remote inspection techniques
- Hull inspection
- Hull cleaning
- Drones
- Remotely operated vehicles
- Magnetic crawlers
- Regulatory framework
- National maritime policies
1 Introduction
Digitalization and the emergence of artificial intelligence (AI)-based technologies are increasingly pervading all areas of our lives, and in parallel, posing multiple challenges for nations. It is observed that the AI agenda remains a strategic priority for governments. Combinedly, respective priorities have led to a form of global competition with regard to the development of AI applications and policies (Smuha, 2021). In 2017, Canada became the first country to establish a national plan for AI. The “Pan-Canadian Artificial Intelligence Strategy” fosters a collaborative AI ecosystem by establishing interconnected nodes of scientific excellence in three major centers for AI: Edmonton, Montreal, and Toronto. The EU AI strategy of 2018 specifies the region’s goal to “lead the way in developing and using AI for good and for all, building on its values and its strengths”. In the following year, the US, through Executive Order 13,859, promised to sustain and enhance the scientific, technological, and economic leadership position in AI research and deployment through a coordinated Federal Government strategy (Federal Register, 2019). During the same year, Singapore launched the “National AI Strategy” that spelled out plans to deepen the usage of AI technologies and rethink business models by 2030. From an Asian context, with its ambitious “Next Generation Artificial Intelligence Development Plan”, China has set out a top-level design blueprint charting its approach to developing AI technology by 2030.
In short, governments from across the globe are catering to the needs of end-users through the adoption of policies that could stimulate beneficial innovation while protecting their citizens from risks involving the usage of AI. Safety, responsibility, and product liability aspects of AI, including negligence, design defects, and manufacturing defects, usually fall into a legal and regulatory vacuum. At the same time, participants of regulatory debates hold divergent views on the so-called term “autonomy”. A unified and well-synchronized “safety” and “liability” approach is vital to the mitigation of potential damages caused by AI. According to the participants, the above is what makes AI trustworthy, i.e., legal, ethical, and robust.
AI national plans also set specific targets for niche ocean and maritime sectors. In this context, semi-autonomous RIT platforms for unmanned aerial vehicles (UAVs) or drones, remotely operated vehicles (ROV), and magnetic crawlers, inter alia, do not explicitly reside on the national agenda despite having gained attention from relevant stakeholders and end users. Today, RIT platforms are being tested and used by service providers, classification societies, and ship owners. However, many intrinsic matters, similar to ones that emanate from the usage of AI, remain undiscussed and therefore, ambiguous. Problems have been projected: standard definitions, third-party liability, data management, and insurance are to name a few thorny issues. The absence of unified guidelines (covering the above) leads to the hypothesis that a single RIT platform may be governed by dissimilar rules and requirements. Today, this is evident from the content found in RIT procedural documents issued by leading classification societies. The current state-of-fragmentation and lack of a standardized approach have the potential to stall innovation in the long run. The authors assert that, before any attempt is made to standardize RIT approaches, it is important to assess the lessons learned and best practices from countries that are taking the lead in AI and RIT-based operations.
2 National Comparative Study
2.1 The Case of the US
The US is a maritime nation comprised of 25,000 miles of coastal and inland waters and rivers home to 361 ports (USCG, 2018). It is axiomatic that the US marine transportation system is expansive. The US maritime domain involves a complex regulatory framework in a variety of locations, from inland ports and waterways to the high seas, often with overlapping legal authorities and agency responsibilities. Several jurisdictional zones exist in the maritime domain that may implicate international and domestic law. The location and use of the autonomous systems’ operations may call into play multiple overlapping jurisdictional concerns, including domestic and international legal obligations (Pribyl, 2018). The US Coast Guard (USCG) has 11 statutory missions and maintains broad authority over navigation safety in the navigable waters of the United States, including the inspection of vessels registered in the US or sailing in US waters. In terms of autonomous vehicles, the USCG is the lead agency for marine vehicles and exercises its oversight in this regard under its port state control, vessel inspection, environmental compliance, and navigational safety authorities. The US Flag fleet includes 18,967 vessels subject to inspection with Coast Guard marine inspectors conducting 19,474 inspections (United States Coast Guard, 2021). The majority of the US fleet is comprised of barges, passenger, and towing vessels.
The Coast Guard delegates this responsibility to the Officer in Charge, Marine Inspection (OCMI), whose primary responsibility is to inspect vessels to ensure compliance with applicable laws and regulations related to safe construction, operation, and manning. The Coast Guard Office of Commercial Vessel Compliance (CG-CVC) is the designated body for the development and maintenance of marine safety and security policies and standards.
There are currently no US regulations that expressly govern the use of RIT or remote inspection technologies. However, as a response to the Covid-19 pandemic crisis, including considerations of the lessons learned from the pandemic, the Coast Guard is taking steps to encourage its inspectors to use remote methods as a means to verify vessel compliance (Marine Safety Information Bulletin, 2020). Many statutory surveys are also performed by Recognized Organizations (ROs) that act on behalf of the Coast Guard. The American Bureau of Shipping (ABS) is the largest RO in the US. For remote inspections, the Coast Guard generally approves the usage of remote techniques on a case-by-case assessment. ROs that use remote survey in lieu of attendance on vessels that are both classed and certificated should contact the relevant Coast Guard office, such as the Flag State Control Division (CG-CVC-4) or the Towing Vessel National Center of Expertise (TVNCOE), to propose the methods and administrative procedures that will be used (Marine Safety Information Bulletin, 2020).
Given the current stage of technological development, remote techniques have not yet achieved an optimum level since they continue to develop equivalent functions on par with human senses used in inspections (i.e., sight). More peer review studies are needed to compare the existing regime of inspections with remote techniques to provide evidence as to which option is better suited and feasible.
The ABS Guidance Notes on the Use of Remote Inspection Technologies (ABS, 2022) offer best practices for class surveys and non-class inspections carried out using unmanned aerial vehicles (UAVs), ROVs, and Robotic Crawlers. The document offers a holistic approach to govern RITs and adequate emphasis is given to “data security policies and procedures” in Sect. 4.11.1. Nonetheless, according to the document, it should be noted that those policies and procedures should be developed by the concerned end-users, including service providers. The Guidance Note includes reference to the following relevant international documents:
-
IACS Recommendations No. 42, Guidelines for Use of Remote Inspection Techniques for Surveys;
-
IACS UR Z7, Hull Classification Surveys 1.6 Remote Inspection Techniques; and
-
IACS UR Z17, Procedural Requirements for Service Suppliers.
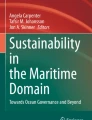
According to the ABS Guidelines, during the planning stage, the ship owner/operator should liaise with ABS and decide jointly on whether to proceed with the survey using RIT (Fig. 2 below). The owner is responsible for selecting an ABS Recognized service provider. Approved service providers should possess all applicable certificates of authorization from recognized national/local authorities and have an internal Quality Management System, Safety Management System, Safety Risk Management, Safety Assurance, and competent personnel to oversee all the above aspects. It is also noted that the owner should provide all documents and drawings related to the work scope to the selected provider, approve the remote inspection plan, and set the Survey Planning (Fig. 1 below). The service provider, during this stage, develops an inspection plan that includes different types of RIT to be used based on risk assessment. The Class reviews the survey planning document to verify whether the survey plan satisfies the applicable ABS Rules. During the operation, which is the second stage of the inspection process, the owner coordinates the survey with the surveyor and the provider (Fig. 1 below). The provider conducts the inspection according to the survey planning document, RIT operation plan, and ABS requirements. The attending class surveyor ensures that the RIV operations team conducts the survey according to the relevant requirements. During the reporting phase of the survey, the provider shares the report and data with the asset owner and Class. Finally, based on the reports, the Class surveyor shall confirm if an additional inspection is required (Fig. 1).

(Source Adapted from ABS [2022])
Roles and responsibilities of the key stakeholders during the 3 phases of the inspection process
2.2 The Case of the Netherlands
The Netherlands has a longstanding maritime tradition dating back over five centuries and holds a strategically significant geographical position with connections to rivers and seas. According to the Maritieme Monitor (2020), the Dutch maritime cluster incorporates eleven sectors: shipping, shipbuilding, offshore (energy), inland shipping, dredging, ports, navy, fishing, maritime services, yacht building/watersport industry, and marine equipment supply. The cluster generates 3.1% of the total GDP of the country and employs approximately 284,917 individuals, which equates to 3.0% of the national workforce (Maritieme Monitor, 2020). The Ministry of Infrastructure and Water Management is currently working to facilitate new initiatives and innovations in the inland maritime sector. Moreover, the Port of Rotterdam has positioned itself as an EU frontrunner in autonomous shipping technology and services through partnerships with tech-start-ups, leading institutions, and national authorities.
According to the Ministry of Infrastructure and Water Management, there is no single legislation for all types of transport modalities to facilitate autonomous drones or any other types of service robots. Maritime autonomous robotic systems are not permitted to operate within Dutch inland waterways; however, experiments are ongoing with (semi-) autonomous inspection vessels. Parties that wish to experiment with any categories of smart shipping, including maritime drones and robotic systems, are invited to contact Rijkswaterstaat (RWS) to evaluate the possibilities.
It goes without saying that the Dutch maritime sector is subject to national, as well as international and European regulations. The Schepenwet (Ships Act) is the central instrument that applies to all seagoing vessels flying the Dutch flag (Government of the Netherlands, 1909). The Act aims at preventing shipping disasters at sea and addresses issues such as ship safety and shipping disaster investigations. There are no provisions in the Act related to the use of remote technologies. In the inland maritime sector, the national legal framework on inland waters, excluding waterways governed by the standards and regulations of the Central Commission for the Navigation on the Rhine (CCNR), can be found in the Inland Navigation Act-Binnenvaartwet (Government of the Netherlands, 2007).
The Dutch Flag Registry is known as the Netherlands Shipping Inspectorate/NSI (Inspectie Leefomgeving en Transport), which is a part of the Human Environment and Transport Inspectorate (ILT) of the Ministry of Infrastructure and Water Management. The Registry has delegated all statutory certification services to eight pre-assigned EU RO: ABS, Indian Register of Shipping, Lloyd’s Register, Nippon Kaiji Kyokai (Class NK), DNV, RINA Services S.p.A., BV (Buraeu Veritas), and Register Holland. It is noted that the Register Holland is a Classification Society that conducts only non-Conventional and/or non-European legislation-based surveys. The Administration supports the use of remote inspection in minor statutory deficiencies and minor damages. However, if an inspection is performed remotely, a physical inspection still needs to be performed afterward.
In cases where the ship owner/manager, in agreement with the captain and personnel on board, requests a remote survey, written justifications should be provided. If the RO accepts this request, then IACS 42 Rev.2 should be followed. Remote inspections are evaluated on a case-by-case basis and as such, no uniform guidelines apply.
It is noted that the request for remote inspection imposes an additional burden on the ship owner/manager and the RO, and that is why it is important to justify why a remote survey is more appropriate than a physical inspection.
Respondents noted that the Covid-19 pandemic could have been the catalyst and the paradigm for remote inspections, but unfortunately, the flag registry did not explore this option further. Instead of remote inspections, extensions were mainly granted for the statutory ship certificates by the Human Environment and Transport Inspectorate. Moreover, the Dutch fleet is in decline, and vessels are usually too small to obtain financial benefits from the usage of UAVs and ROVs. What is observed is that ship owners are yet to be convinced about the advantages of deploying remote technologies for the conduct of surveys and inspections. The following set of challenges were revealed during discussions with Dutch key experts in addition to the aforementioned:
-
Visibility in the Dutch water imposes a burden for underwater inspections with autonomous underwater vehicles (AUVs);
-
Problems have been noted with live-streaming technology. The sector needs companies that can provide effective live-streaming video-audio tools for a thorough examination of the structural defects;
-
Drones, during the livestream operation, should always show their exact location during the inspection (which is currently not the case). This facilitates the work of the surveyors;
-
Permission for hull cleaning from the Port Authority remains a challenging task. It should be kept in mind that hull cleaning is not a part of the Statutory certification and remains at the ship-owner’s discretion;
-
Flag Registries like Liberia are keener than their European counterparts to promote the use of remote technologies; and
-
Specific Regulations are needed for trials and inspections. The findings of these trials should be crosschecked with findings from physical inspection to address gaps and overcome barriers.
2.3 The Case of Canada
With the world’s longest coastline and connection to three oceans, the maritime sector in Canada contributes around CAN$31.7 billion annually in gross domestic product and accounts for close to 300,000 jobs (Government of Canada, 2021). Similar to other major maritime nations, Canada aims to be a global leader in the blue economy by integrating growth with ocean conservation and climate action. Activities dependent on the ocean, such as fish processing, shipbuilding, and marine transportation, create stable jobs and prosperity for coastal regions. Currently, there are no regulations/provisions for remote inspection techniques. However, the current four-level regime that entered into force in June 2021 is said to facilitate the eventual adoption of new inspection techniques in the future. The four documents relevant to the Canadian vessel inspection are described in Table 1 (below).
In the context of the Covid-19 pandemic, like many other administrations, Transport Canada adapted its inspection processes on a case-by-case basis and accepted remote inspections to a certain extent. Transport Canada is looking forward to developing a framework that would support the use of new emerging technology. To this effect, there is a multimodal (air, surface, rail, marine) departmental modernization initiative, and the usage of RIT is one of the end objectives of this initiative. The discussions with Deep Trekker, one of the largest providers in the country for remotely operated vehicles and robots, confirmed the limited use of remote techniques on Canadian vessels. The advantages and disadvantages of underwater inspection methods are summarized in Table 2 (below):
Respondents underlined that three main obstacles are present when it comes to using ROVs:
-
1.
Understanding what you have inspected (vs. not inspected);
-
2.
Visualizing the data in a meaningful way; and
-
3.
Sending the data to stakeholders in a meaningful way.
The first obstacle is related to the location of the inspection. GPS positioning systems do not work underwater as they can travel only a couple of inches through the water. One potential solution is the utilization of technology such as the underwater positioning system (USBL), which provides a position of the ROV using acoustic positioning. USBL consists of a transceiver mounted on the vessel and a transponder mounted on the ROV which jointly cooperate to communicate the ROV’s position relative to the vessel. However, there are cases that USBL on its own does not work well because the vessel is an obstacle for acoustics to communicate from the dunking transducer to the ROV’s transponder. USBL is also inherently inaccurate by 20 cm of error and with seconds of delay between pings, making autonomous motions difficult and unreliable using just USBL. Deep Trekker is currently working on other methods for getting positioning and allowing for autopilot functionality.
The second obstacle is the visualization of the data in a meaningful way. Like a diver’s eyes, video has a limited field of view to give positional context to the images the surveyor is seeing. A 3D rendering or model allows the surveyor to analyze the aggregate of the data points collected during an inspection. Currently, underwater 3D models are too time-consuming and require expert-level expertise whereby the technology remains prohibitively expensive.
The third obstacle is the proper interpretation of the data. The surveyors usually rely on divers’ expertise to confirm the vessel’s condition. In contrast, an ROV allows video streaming or video recording through which stakeholders could monitor the inspection process. However, there are many hours of footage to comb through to get the answers needed for the surveyor. The operator of the ROV should still be certified and experienced in hull inspections to identify issues. If the surveyor can monitor the inspection process next to the pilot, the quality of the report could be increased. A hull survey report engine must enter the inspected data and then produce a PDF report with photos of points-of-interest and easy access to key milestones during the video with text added for additional details.
Despite the obstacles that have been identified, it should be underlined that 3D RIT and reporting technologies are paving the way for significant developments in ship inspections. Interpreting changes over time with the use of a 3D model is helpful for maintenance purposes, evaluating corrosion, fouling changes, and damage. Providing classification societies with historical information on the vessel could prove valuable in their determination if the vessel is seaworthy and safe. There are three main methods for building underwater 3D models: Sonar, Laser, and Photogrammetry. There are other interesting combinations of other sensor technology such as hyperspectral imaging and LiDAR that could provide good data as well, but these are still unproven underwater.
Sonar is very useful for larger areas and general target identification with its longer range and capabilities even in murky water, but it should be noted that 3D sonar technology is limited in its capability for identifying small defects or changes over time in structures such as the propeller. The most used technology for propeller and small structure evaluations is the laser. Nonetheless, laser scanning has a very short-range capability (1–5 m) and is severely impacted by water clarity, making it more difficult for it to effectively provide full hull 3D models in a reasonable and cost-effective manner. Photogrammetry faces similar range and clarity issues, but there are encouraging developments that have found ways to utilize stereo cameras to stitch together 3D models faster and with less manual effort. As these technologies come down in size, price, and complication, they will play a critical role in making effective hull inspections easier.
2.4 The Case of Norway
Norway is a leading ocean economy with well-developed business clusters and local communities living along the coastline. The Norwegian shipping industry is at the forefront of exploiting new technologies like autonomous ships and onboard systems. The Norwegian Maritime Authority (NMA) is an agency of the Ministry of Trade, Industry, and Fisheries and the Ministry of Climate and Environment. NMA is the administrative and supervisory authority for environmental, safety, and legal issues of vessels flying the Norwegian flag and foreign ships in Norwegian waters.
The Register of NMA consists of the Norwegian ordinary ship register (NOR), the Norwegian International Ship Register (NIS), and the Shipbuilding Register (a sub-unit of NOR). For the NOR, there is a mandatory registration for all Norwegian ships of 15 meters and above and voluntary registration of Norwegian fishing and commercial vessels less than 15 meters. The regulatory framework for registration to NOR is based on the Norwegian Maritime Code of 24 June 1994 no. 39 (NMA, 1994). The NOR is open to EU or Norwegian owners and is the responsible authority for surveys and statutory certificates of vessels registered in NOR. International ship certificates for cargo ships above 500 gross tonnages (GT) are usually delegated to RO—upon request from the owner in accordance with the Class Agreement (NMA, 2013).
NIS was formed as a competitive alternative for Norwegian shipping companies operating in international waters and mainly competes with flags of convenience registers such as Panama and Liberia. NIS, which aims to maintain Norwegian vessels under the Norwegian flag, is open to owners of all nationalities. Ships are registered according to the law of 12 June 1987 No. 48 related to the Norwegian International Ship Register (NMA, 1987). Vessels above 500 GT classed by a RO are delegated to class according to the Class Agreement. The NMA inspects ships less than 500 GT as well as NIS ships of 500 GT and more which are not classed by one of the ROs. The number of vessels by the end of 2020 for NOR and NIS are presented in Table 3 (below).
Six classification societies are authorized to carry out surveys on behalf of the Norwegian administration namely, ABS, Bureau Veritas (BV), DNV, Lloyds Register of Shipping, RINA, and Class NK. Classification societies are used for the inspection of NIS vessels. For surveys of the NOR, the inspectors of NMA are usually appointed. The 130 in-house surveyors of the Norwegian Maritime Authority perform all vessel-related surveys and thickness measurements as seen fit. NMA Surveyors do not conduct thickness measurements themselves. These are performed by RO-approved suppliers on the “IACS List of Thickness measurement Firms”, and according to IACS UR-Z7.
Currently, there are no specific regulations and policies for remote surveys, especially when it comes to surveys conducted for the Norwegian Ordinary Ship Register. The NMA may utilize remote technologies when achieving equivalency with a traditional survey. As a consequence of Covid-19 pandemic, the NMA allowed RO to extend the validity of statutory certificates for three months (NMA, 2020). DNV works in close cooperation with the NMA and completed the world’s first in-water remote ship surveys using ROVs in 2020. When a classification society decides to perform a remote survey, especially for NIS-registered vessels, no further approval is required from the NMA.
It is important to note that respondents displayed a high level of trust in remote technologies, especially in drones given that mitigating technical challenges through drone testing has been successful in other sectors (i.e., aerospace and oil industries). Discussions also revealed that in the near future, more emphasis should be given to the development of guidelines for data-relevant issues, such as minimal requirements for data quality, data ownership, and data flow. Guidelines will be required to govern the work of service robots once they reach the stage of full autonomy. Drone swarms are expected to be the next generation of robotics in the maritime sector. Aerial drone swarms deployed from an unmanned marine robotic station will autonomously inspect the vessel removing the need for a manual human inspection system.
2.5 The Case of China
With an array of ambitious AI plans and policies, China is said to be leading the way for AI technological developments and market applications. These policies aim to motivate different stakeholders on the ground that AI is a field that is being backed by the government and is worth investing in (Li et al., 2021).
The Maritime Safety Administration of the People’s Republic of China (CMSA) is the governmental agency for maritime safety, vessel inspection, and pollution from ships. The Agency is responsible for regulations, technical codes, and standards in safety supervision, marine pollution prevention, and navigational aid. The Agency supervises the statutory survey and certification for ships. For international ships trading internationally, the statutory survey processes have been delegated to the China Classification Society (CCS). According to respondents, no specific regulations or guidelines have been released by the Agency that enables the use of remote inspections.
CCS provides classification services to ships, including statutory surveys, verification, certification and accreditation, and other services in accordance with the International Maritime Organization (IMO) rules and requirements and relevant regulations of the authorizing flag States or regions. Class services are provided to more than 32,000 international and domestic shipping ships and 2,600 ocean fishing vessels. Surveys utilizing RITs are mainly operational and not statutory. These techniques are applied on oil tankers, but not for hull survey, inspection, and cleaning. In 2018, the CCS released the “Guidelines for Use of Unmanned Aerial Vehicles for Surveys” (CCS, 2018) for ships and offshore installations following the relevant requirements of IACS Recommendation 42 titled “Guidelines for Use of Remote Inspection Techniques for surveys”. Remote inspections by way of UAVs are to be carried out by professional organizations. The specified technical standards are relevant to safety, operational performance, endurance capacity, data transmission and communication, storage, airborne lighting, and airborne cameras. Provisions also exist for the collection and processing of visual data and data security.
Steel ships are built and surveyed following the Rules for Classification of Sea-going Steel Ships published by CSS (CCS, 2022). The updated version of the rules includes provisions for RIT utilized in (a) thickness measurements and close-up surveys—hull structures and (b) In-Water Survey (Table 1). For surveys conducted using RIT, one or more of the following means for access, acceptable to the Surveyor, is to be provided: (1) unmanned robot arm; (2) ROV (3) UAV/Drones; and (4) Other means acceptable to the Society.
2.6 The Case of Singapore
Singapore’s maritime network is an amalgam of entrepreneurs, research and development institutions, classification societies, technology companies, and international partners. Over the last two decades, the MPA has developed the Maritime Innovation and Technology (MINT) Fund to expand its maritime innovation ecosystem. The Singapore Registry of Ships (SRS), with more than 4,400 vessels, aggregating over 96 million gross tons (GT), ranks fifth among the list of global fleets (MPA, n.d.b). The Merchant Shipping (Safety Convention) Regulations is the instrument for traditional surveys and certificates (Singapore Statutes Online, 2021). MPA has delegated the survey and certification of ships under the Singapore Registry of Ships (SRS) to eight (8) Recognized Organizations that are full members of the International Association of Classification Societies (IACS): ABS, BV, CCS, DNV, KR, LR, NK, and Rina.
Singapore advocates the usage of emerging technologies to improve the safety and efficiency of the maritime industry. Since 2018, Singapore has accepted the conduct of surveys on board Singapore Registered Ships via the use of RIT. Where permitted, RIT may be used to facilitate the required external and internal examinations. Before any inspection, the Flag State should proceed toward approval on a case-by-case basis. Shipping Circular No.13 of 2018 dated 23 Oct 2018 was promulgated to inform all stakeholders regarding approval aspects concerning RIT (Table 4, below). The RIT, to this end, may comprise the following:
-
Unmanned Robotic Arm;
-
ROV;
-
Unmanned Aircraft System (UAS); and
-
Other means acceptable to the Administration.
Remote surveys have been embraced by the sector for quite some time, but albeit still lack a standardized approach. Singapore seeks to address the lack of industry standardization and for this reason a Joint Industry Project (JIP) has been launched for the development of a Singapore standard in remote surveys, inspections, and audits.
In 2020 BV Singapore cooperated with PSA Marine to conduct the first remote survey for a harbor tug registered under the Singapore Registry of Ships. The tug underwent a fully accredited annual survey of the hull, machinery, load lines, safety, and telecommunications equipment using smart mobile devices and optimized live-streaming without the physical presence of a surveyor. During the Covid-19 pandemic outbreak, another joint remote inspection was conducted by BV, Nokia, and Sembcorp Marine. The inspection set the basis for establishing a new class procedure for the remote survey of vessels under construction that could optimally assess the integrity of the hull components efficiently.
The service providers that conduct hull inspection and surveys using RIT are authorized service providers under the respective RO. Relevantly, RO follows UR Z17 Rev14 CLN issued by IACS for the procedural requirements for approval and certification of service providers. RO, after being authorized by MPA to carry out statutory survey and certification, are required to ensure that the service providers meet the service standards. Respondents informed that disputes concerning liability between service provider and client should be settled through appropriate legal clauses in the service contract governing the unsatisfactory quality of service rendered on board.
Participants from the MPA informed that they anticipate the development of detailed guidelines from IACS on RIT, in particular, with reference to IACS Recommendation—REC 42 REV 2 CLN. Currently, they have noted a plethora of guidance and notes prepared by different classification societies, such as ABS, DNV, LR, and RINA. A comprehensive guidance from IACS, detailing the principles of usage, limitations, and procedures, according to the respondents, would be helpful for the flag administration and its stakeholders, such as ship owners/managers to assess the suitability of RIT deployment subject to specific conditions experienced by the ship. Subsequently, a global framework promulgated under the auspices of the IMO, as noted by the participants, would help achieve governance uniformity in the likelihood of RIT mass deployment by IMO member States.
3 Conclusions
The current study highlights that there are robust AI national plans in place by some of the major maritime nations. Those plans set specific targets for the ocean and maritime sectors. However, autonomous and semi-autonomous RIT platforms (e.g., drones, ROVs, and magnetic crawlers) have been used in the past by flag States only on a case-by-case basis.
As work continues to expand the usage of RIT, participants note the value of a “lawful system” that could serve as a tool to boost trustworthiness in RIT given that reliance on law is important to certain stakeholders involved in the RIT business model, such as policymakers and flag state officials that are not familiar with the system technicalities (Pastra et al., 2022). In parallel, IACS and IMO techno-regulatory instruments could be updated as well. Altogether, based on the responses provided by respondents, the following elements could be taken into account with a view to making the system “lawful”:
-
Regulation: IMO harmonized System aligned with IACS Unified Requirements;
-
A separate Codes of Conduct: IACS rules and procedures;
-
Standardization: ISO Standards or the IEEE P7000 standards series for maritime remote technology;
-
Certification: Certificate standards for service providers and RITs operators;
-
National legislation for UAVs: (a) for their operation in Visual Line of Sight (VLOS), Extended Visual Line of Sight (EVLOS), and Beyond Visual Line of Sight (BVLOS) and (b) the certification of operators;
-
Energy Efficiency: While AI and new technologies, including RIT, introduce efficiency gains and offer many advantages in undertaking tasks that were previously done partly or fully manually, then it will introduce new energy demands which in turn could result in a negative impact on greenhouse gas emissions and the environment. Therefore, it is important that in parallel with the introduction of RIT that renewable and green energy forms are integrated into this process to best ensure a sustainable way forward. For example, underwater hull cleaning can result in a true win–win situation if using hull cleaning crawlers that are fueled by electricity that has been produced using solar or wind power, sustainable biofuels, or any other renewable energy forms. The same can be said for drones used for close-up inspections and thickness measurements.
In summary, flag States are, slowly but steadily, supporting and developing requirements for the use of RIT and are currently going through an experience-building phase. It could, therefore, be beneficial if the noteworthy developments and best practices could be consolidated and applied in the development of harmonized guidelines in order to establish a global level playing field that fosters investments in the technology. As RIT, generic emerging technologies, and technologies with emerging applications are becoming increasingly robust, the human element is still an important part that cannot be overlooked. This will have to be duly understood and reflected in all future work with regards to RIT (progressive autonomy) regulatory frameworks. The authors assert that further developments leading to the adoption of an international regulatory framework could certainly lead to an increased uptake in the use of RIT.
References
American Bureau of Shipping (ABS). (2022). Guidance notes on the use of remote inspection technologies. https://ww2.eagle.org/content/dam/eagle/rules-and-guides/current/other/242-gn-remote-inspection-tech-dec-2022/rit-gn-dec22.pdf (Accessed 30 September 2022).
BUGWRIGHT2 (undated). The bugwright2 project. https://www.bugwright2.eu/ (Accessed 7 September 2022).
Canada Shipping Act (CSA). (2001). https://tc.canada.ca/en/corporate-services/acts-regulations/canada-shipping-act-2001-2001-c-26#text (Accessed 1 June 2022).
China Classification Society (CCS). (2018). Unmanned surface vehicle inspection guide 2018. https://www.ccs.org.cn/ccswz/specialDetail?id=201900001000008283 (Accessed 26 May 2022).
China Classification Society (CCS). (2022). Rules for Classification of Sea-going Steel Ships. https://www.ccs.org.cn/ccswzen/articleDetail?id=202206060358299873&columnId=202007171176731956 (Accessed 26 June 2022).
Deep Trekker (undated). Underwater remotely operated vehicles & robots. https://www.deeptrekker.com/?utm_term=deep%20trekker&utm_campaign=Brand+-+Deep+Trekker+%7C+FX&utm_source=adwords&utm_medium=ppc&hsa_acc=4277424668&hsa_cam=14427139642&hsa_grp=126672285979&hsa_ad=542027625311&hsa_src=g&hsa_tgt=kwd-307000914883&hsa_kw=deep%20trekker&hsa_mt=p&hsa_net=adwords&hsa_ver=3&gclid=CjwKCAjwv-GUBhAzEiwASUMm4rR-eGlYITbheOj0yYbdF4JAUQWWr4PpvepDhpctknXSv1ydd0keiBoCsvgQAvD_BwE (Accessed 26 May 2022).
European Commission. (2018). Artificial intelligence for Europe. Communication from the Commission to the European Parliament, the European Council, the Council, the European Economic and Social Committee and the Committee of the Regions, COM(2018)237. https://ec.europa.eu/transparency/documents-register/detail?ref=COM(2018)237&lang=en (Accessed 25 May 2022).
Federal Register. (2019). Maintaining American leadership in artificial intelligence. https://www.federalregister.gov/documents/2019/02/14/2019-02544/maintaining-american-leadership-in-artificial-intelligence (Accessed 8 May 2022).
Government of the Netherlands. (1909). The schepenwet (ships act). https://wetten.overheid.nl/BWBR0001876/2020-01-01 (Accessed 30 May 2022).
Government of the Netherlands. (2007). Binnenvaartwet (Inland navigation act). https://wetten.overheid.nl/BWBR0023009/2021-01-01 (Accessed 30 May 2022).
Government of Canada. (2021). Blue economy strategy. https://www.dfo-mpo.gc.ca/campaign-campagne/bes-seb/index-eng.html (Accessed 26 May 2022).
Government of Canada (2022). TP 15456—Canadian Vessel Plan Approval and Inspection Standard. https://tc.canada.ca/en/marine-transportation/marine-safety/tp-15456-canadian-vessel-plan-approval-inspection-standard-revised-2022-10-01. (Accessed 1 June 2022).
IACS. (2016). Rec 42 guidelines for use of remote inspection techniques for surveys—Rev.2. Available at: https://iacs.org.uk/publications/recommendations/41-60/rec-42-rev2-cln/ (Accessed 25 May 2022).
IACS. (2018). UR Z7 hull classification surveys—Rev.27. https://iacs.org.uk/publications/unified-requirements/ur-z/ur-z7-rev28-corr1-cln/ur-z7-rev27-cln/ (Accessed 25 May 2022).
IACS (International Association of Classification Societies). (2021). R Z17 Procedural requirements for service suppliers—Rev.16. Available at: https://iacs.org.uk/search-result?query=UR+Z17 (Accessed 25 May 2022).
Li, D., Tong, T. W., & Xiao, Y. (2021). Is China emerging as the global leader in AI? https://hbr.org/2021/02/is-china-emerging-as-the-global-leader-in-ai (Accessed 26 May 2022).
Marine Safety Information Bulletin. (2020). Vessel inspections, exams, and documentation. MSIB Number: 09–20. https://www.dco.uscg.mil/Portals/9/DCO%20Documents/5p/MSIB/2020/MSIB%2009-20%20Vessel%20Inspections_Exams_and_Documentation.pdf (Accessed 24 May 2022).
Maritime and Port Authority of Singapore (MPA). (2018). Circular No. 13 of 2018: Acceptance for the use of remote inspection techniques for survey. https://www.mpa.gov.sg/web/wcm/connect/www/22bd39b9-741a-40bc-9cba-6c2f1ffd2695/sc_no_13_of_2018.pdf?MOD=AJPERES (Accessed 26 May 2022).
Maritime by Holland. (undated). Maritime monitor 2020. https://www.maritimebyholland.com/maritime/publications/maritime-monitor-2020/ (Accessed 30 May 2022).
Maritime and Port Authority of Singapore (MPA). (undated). Singapore registry of ships. https://www.mpa.gov.sg/web/portal/home/singapore-registry-of-ships (Accessed 26 May 2022).
NMA (1987). Act of 12 June 1987 No. 48 relating to a Norwegian International Ship Register (NIS). https://www.sdir.no/en/shipping/legislation/laws/the-nis-act/ (Accessed 25 May 2022).
NMA. (1994). Excerpts from the Norwegian Maritime Code of 24 June 1994 No. 39. https://www.sdir.no/contentassets/3bbe45af5f294abe852675c7a9795cf7/the-norwegian-maritime-code-no.-39-of-24-june-1994-excerpts.pdf?t=1618397153331 (Accessed 25 May 2022).
NMA. (2013) The Class agreement. https://www.sdir.no/en/shipping/vessels/vessel-surveys/approved-classification-societies/klasseavtalen/ (Accessed 25 May 2022).
NMA (Norwegian Maritime Authority). (2020). Further extensions of statutory surveys and completion of renewal surveys by means of alternative methods due to Covid-19 rev.1. https://www.sdir.no/en/shipping/legislation/directives/instructions-to-class-further-extensions-of-statutory-surveys-and-completion-of-renewal-surveys-by-means-of-alternative-methods-due-to-covid-19/ (Accessed 25 May 2022).
Pastra, A., Schauffel, N., Ellwart, T., & Johansson, T. (2022). Building a trust ecosystem for remote inspection technologies in ship hull inspections. Law Innovation and Technology 14(2), 474–497. https://doi.org/10.1080/17579961.2022.2113666
Pribyl, S. T. (2018). Regulating drones in maritime and energy sectors. In K. Valavanis & G. Vachtsevanos (Eds.), Handbook of unmanned aerial vehicles. Springer.
Smart Nation Singapore (undated). National artificial intelligence strategy. https://www.smartnation.gov.sg/initiatives/artificial-intelligence (Accessed 25 May 2022).
Smuha, N. A. (2021). From a ‘race to AI’ to a ‘race to AI regulation’: Regulatory competition for artificial intelligence. Law, Innovation and Technology, 13, 57–84.
Statistics Norway (undated). Official statistics since 1876. https://www.ssb.no/en (Accessed 30 May 2022).
United States Coast Guard. (2018). Maritime commerce strategic outlook. https://media.defense.gov/2018/Oct/05/2002049100/-1/-1/1/USCG%20MARITIME%20COMMERCE%20STRATEGIC%20OUTLOOK-RELEASABLE.PDF (Accessed 30 May 2022).
United States Coast Guard. (2021). Flag state control in the United States. 2021 Domestic Annual Report. https://www.dco.uscg.mil/Portals/9/DCO%20Documents/5p/CG-5PC/CG-CVC/CVC1/AnnualRpt/2021%20Flag%20State%20Control%20Domestic%20Annual%20Report.pdf (Accessed 6 April 2022).
Authors remain grateful to Mr. Andreas Åberg, Department of Inspections, Remote Survey Center of the Norwegian Maritime Authority for his expert insights and assistance provided during the examination of the “Norwegian” part of the study.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Pastra, A. et al. (2023). Lessons Learned from Maritime Nations Leading Autonomous Operations and Remote Inspection Techniques. In: Johansson, T.M., Dalaklis, D., Fernández, J.E., Pastra, A., Lennan, M. (eds) Smart Ports and Robotic Systems . Studies in National Governance and Emerging Technologies. Palgrave Macmillan, Cham. https://doi.org/10.1007/978-3-031-25296-9_19
Download citation
DOI: https://doi.org/10.1007/978-3-031-25296-9_19
Published:
Publisher Name: Palgrave Macmillan, Cham
Print ISBN: 978-3-031-25295-2
Online ISBN: 978-3-031-25296-9
eBook Packages: Political Science and International StudiesPolitical Science and International Studies (R0)