
Abstract
Haptic perception of objects’ softness plays an important role in the identification and interaction with objects. How softness is represented in the brain is yet not clear. Here we investigated whether there is a neutral point in the perceptual representation of haptically perceived softness relative to which the objects are represented as being “soft” or “hard”. We created a wide range of softness stimuli, varying from very hard (ceramic) to very soft foam with differently soft foam and silicone stimuli in between. Participants were assigned to one of three different stimulus set conditions: full set (18 stimuli), soft set (13 softest stimuli) or the hard set (13 hardest stimuli). They categorized each stimulus as “hard” or “soft” and we estimated the neutral point as the point of subjectively equal categorization as “hard” or “soft”. We found that neutral points were different from the middle stimulus of each set. Furthermore, during the course of the experiment neutral points rather moved away from the middle of the stimulus set than towards it. Our results indicate that there might be a neutral point in the representation of haptically perceived softness, however range effects may play a role.
This work was supported by Deutsche Forschungsgemeinschaf (DFG, German Research Foundation) - project number 222641018 - SFB/TRR 135, A5.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
How do we judge the quality of a mattress or the air pressure in bicycle tires? We need to touch these objects and judge their softness. In addition to warmth, roughness and friction, softness is a fundamental dimension in the haptic perception of objects [1]. It helps us to differentiate, classify and identify objects [2, 3]. It is also important for the interaction with objects, e.g. adjusting contact forces [3]. Softness is a subjective measure of the ability of objects to deform under pressure [4]. It’s physical correlate is compliance or Young’s modulus, defined as the ratio between the displacement of the surface of an object and the force applied to the object [3] (but see [5]). To perceive the softness of an object humans usually press the object between two fingers or indented with a finger or a tool [6]. This provides both tactile and kinesthetic information [7,8,9,10]. Also remembered softness of the object affects perceived softness [11]. Depending on the sensory and prior information, we mainly categorize objects as “hard” or “soft”. It was also shown that we are quite good in discriminating different degrees of softness [3, 7, 8]. However, it is not yet clear how softness is represented in the brain.
Multiple studies have shown that changes in response to adaptation (after-effects) can provide information about how perceptual dimensions are coded in the brain. Also softness is susceptible to adaptation [12]. A silicone stimulus was perceived to be harder if the finger had previously adapted to a softer stimulus, and it was perceived as being softer if the finger pad had previously been adapted to a harder stimulus. In a general model of perception [13] it is assumed that a perceptual dimension is represented by the activity of several overlapping neural channels, each of which is finely tuned to a certain level along this dimension (e.g. orientation selective neurons). Perception depends on the overall activity of these neurons. When being exposed to a stimulus for a prolonged time, the channels that are most sensitive to it adapt, i.e. their responses are reduced. The relative activity of the adjacent channels then predominates and the overall response is shifted away from the adaption stimulus. Thus, the reported shift in the haptically perceived softness away from the softness of the adaptation stimulus suggests that there might be neural channels tuned to different softness values [12]. However, the authors also found a significant shift in the softness perception of a stimulus after adaptation to a stimulus which had approximately the same physical softness. This implies that a longer exploration of a stimulus leads to an altered perception of the softness of that stimulus. This finding cannot be explained by the above-mentioned model, in which perceived intensity of the adapted stimulus does not change [13]. However, such effects have been observed in visual perception. For instance, faces appear to be more average after prolonged viewing or colors fade after prolonged exposure [13]. It was proposed that this kind of after-effects arise in norm-based coding, i.e. the perceptual dimension is represented in the activity of two rather broadly tuned channels (matched to opposite poles of the perceptual dimension e.g. male vs. female in facial perception) and the information is encoded as the difference to a unique neutral point (equal activation of both channels) [13]. In such representation, if adaptation affects the sensitivity of one channel more than the other the neutral point shifts towards the adaptation stimulus. Consequently a stimulus with the same properties as the adaptation stimulus appears closer to the neutral point after adaptation [13]. In the case of softness perception, according to this model, it could be assumed that one channel codes the property “hard” and the other channel codes the property “soft”. Adaptation to a hard stimulus would consequently shift the neutral point to a harder value. If the same stimulus was presented again, it would be closer to the shifted neutral point and thus be perceived to be softer, as found by [12].
Further, [8] showed that the point at which an object was categorized 50% “hard” and 50% “soft” was roughly the same as the measured compliance of the human fingertip-at least on average. The authors speculated, that the softness of one’s own fingertip might be the neutral point in the perception of softness. However, the neutral point identified by [8] was roughly the middle of the presented stimulus set. Hence, it is not clear whether it actually reflects the neutral point or is created by task demands, i.e. the strategy to choose the middle of the stimulus range when being asked to assign the stimuli to two categories.
Here we test the speculation of [8] that there is a neutral point in the perception of softness. We created a wide range of stimuli, ranging from very hard (stone) to very soft (very soft foam) and presented three groups of participants each with a different stimulus set: the full set consisting of 18 stimuli; the soft set containing the softest 13 stimuli or the hard set containing the hardest 13 stimuli. This way, the stimuli overlap between the conditions, but each set had a different middle stimulus. In every trial, participants touched one stimulus and categorized it either as “hard” or “soft”. From participants’ responses we estimated the point of subjectively equal categorization as “hard” or “soft” (we refer to it as PSE in the following). We expected that if results are merely driven by participants’ strategy, the PSEs would be each in the middle of the corresponding stimulus set. However, if participants would use the softness of their finger to decide whether a stimulus is hard or soft we could expect to find similar PSEs across set conditions. We also looked at how PSEs develop over the course of the experiment, as this could reflect learning. We found that PSEs change with the range of the stimulus set but they are different from the middle stimulus. Also, during the course of the experiment PSEs moved away from the middle of the stimulus set although participants had more and more information to identify the middle stimulus. Our results suggest that there is a perceptual neutral point of softness that does not fully depend on the range of the stimulus set.
2 Methods
2.1 Participants
24 volunteers (10 males, mean age 26 years, range 19–62 years) participated in the experiment. They were naive to the purpose of the experiment and were refunded. None of them reported any sensory or motor impairment of the dominant hand and arm. Written informed consent was obtained from each participant. The study was approved by the local ethics committee at Justus-Liebig University Giessen LEK FB06 (SFB-TPA5, 22/08/13) and was in line with the declaration of Helsinki from 2008.
2.2 Apparatus
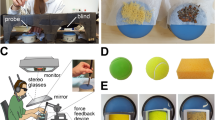
The experiments were performed at a visuo-haptic workbench, which comprised a PHANToM 1.5A haptic force feedback device, a 22”-computer screen (120 Hz, 1280\(\,\times \,\)1024 pixel), stereo glasses, a mirror and a force sensor consisting of a measuring beam (LCB 130) and a measuring amplifier (GSV-2AS, resolution 0.05 N, temporal 682 Hz). The participants sat in front of the workbench and the stimuli were placed in front of them on the force sensor. The mirror prevented direct sight on the experimental setup and the stimuli, and aligned them with their virtual visual representation. To guide the participants through the experiment, a virtual schematic 3D representation of the set up and the finger was displayed on the monitor, which was placed above the mirror. The index finger of the dominant hand was connected to the PHANToM arm using a custom-made adapter, leaving the finger pad uncovered and allowing free movement.
2.3 Stimuli
Stimuli were created from different materials to create a wide continuous elasticity range. We used differently soft foam for the two softest stimuli and fibreboard and ceramic for the two hardest stimuli. Stimuli with intermediate softness were produced by mixing a two-component silicone rubber solution (Alpa Sil EH 10:1) with varying amounts of a silicone oil (polydimethylsiloxane, viscosity 50 mPas). After mixing, the solutions were poured into cylindrical plastic dishes (75 mm diameter\(\,\times \,\)38 mm high) to harden. In order to prevent that the stimuli could be distinguished by their surface, all 18 stimuli were covered with pieces of cotton cloth. We measured the elasticity of the stimuli by following the standard methodology proposed by [14]. To obtain standardized samples of the same material for the measurement, a portion of the mixed solutions was poured into small cylinders (10 mm thick, 10 mm in diameter) and the same shapes were cut out from foam. The small stimulus samples were placed on the force sensor and intended by the force feedback device. For this purpose, instead of the fingertip adapter an aluminium plate (24 mm diameter) was attached on the PHANToM arm. The applied force was increased by 0.005 N every 3 ms until a minimum force of 1 N and a minimum displacement of 1 mm were detected. The resulting force and displacement data were converted into stress-strain data. A linear Young’s modulus was fitted to each stress-strain curve (only for 0–0.1 strain) in MATLAB R2017. [4]. The elasticity of the two hardest stimuli could not be measured with the same method. However, it is reasonable to assume that their elasticity is highest and that they would constitute the upper asymptote in the psychometric function, thus a precise measurement of their elasticity could be neglected. The Young‘s moduli of the stimuli were: >200 for the hardest two stimuli, 199, 169, 141, 133, 127, 108, 102, 86, 81, 63, 57, 48, 43, 34, 3 and 0.8 kPa. The hard set ranged between >200 and 57 kPa and the soft one between 133 and 0.8 kPa.
2.4 Design and Procedure
The experiment was conducted using a between-subject design with three stimulus set conditions: full set containing all stimuli, hard set containing the hardest 13 stimuli, soft set, containing the softest 13 stimuli. Eight participants were assigned to each condition. The experiment consisted of 5 blocks. Each stimulus was presented twice in each block and overall 10 times in randomized order. This resulted in overall 180 trials in the full set condition, and 130 trials in the reduced set conditions. The independent variable was the presented stimulus set and the dependent variable was the PSE estimated from participants’ judgments.
In each trial participants were presented with a stimulus. They could explore the softness of the stimulus as long as they wanted by using the index finger of their dominant hand. The task of the participants was to assign each stimulus either to the category “soft” or “hard”. Participants indicated their response by moving their finger to the corresponding word in the virtual scene. Between the trials, the finger rested in the left corner of the work space. Each experimental session lasted about 30–45 min.
2.5 Analysis
Each participant’s answers composed individual psychometric data, to which a cumulative Gaussian function was fitted using the psignifit 4 toolbox [15]. These functions represent the relationship between the Young‘s modulus and the likelihood of a “hard” response. The PSE (\(\mu \) of the cumlulative function) was estimated as the Youngs‘s modulus at which the answers were 50% “hard” and 50% “soft”.
3 Results
Figure 1 shows average PSEs for the three stimulus set conditions. A one-way ANOVA performed with the factor set condition and the dependent variable PSE showed a statistically significant influence of the set condition on the PSEs, F(2,21) = 26.77, p < 0.001. Post-hoc tests for pairwise comparisons (Bonferroni-corrected for 3 comparisons, \(\alpha \) = .017) revealed that the PSE in the hard condition significant differed from the other two conditions. The difference in PSEs between condition full and soft was not statistically significant.

A Individual psychometric functions. textbfB Average PSEs and the Youngs’s modulus of the middle stimulus for each stimulus set. The error bars represent the standard error. ** p < 0.01
In order to investigate the dependence of the responses on the stimulus set, we compared the average PSE in each condition to the Young’s modulus of the middle stimulus of set in this condition (Fig. 1). The two-tailed t-tests performed for each condition showed a statistically significant difference between the average PSE and the Young‘s modulus of the middle stimulus in the full set condition, t(7) = −6.42, p < 0.001 and the hard set condition, t(7) = −4.84, p = 0.002. The difference in the soft set condition was not significant, t(7) = 0.683, p = 0.517.

A Development of the PSEs over the course of the experiment. Trials of each participant were divided into five blocks of equal size and PSEs were determined for each block by averaging the responses across participants for each block and each stimulus set condition. Dotted lines indicate regression lines. B Average PSEs in the first and second half of the experiment. For statistical analyses for each participant PSEs were estimated based on the trials in the first half of the experiment and the second half of the experiment. Error bars indicate the standard error, * p < 0.05
In addition, we investigated how participants’ answers changed over the course of the experiment. Figure 2 clearly shows that the PSEs shift towards softer values over the course of the experiment, which also implies a shift away from the middle stimulus of the set, in all three conditions. To check the statistical significance of this shift, we compared the average PSEs of the first half of the experiment and the last one in each condition with a two-tailed t-test. There was a statistically significant difference between the average PSEs of the two blocks in the full set condition, t(7) = 2.84, p = 0.025. In the soft set conditions the differences in average PSEs between the two halves was not significant, t(7) = 1.00, p = 0.349, and at the edge of significance in the hard set condition t(7) = 2.19, p = 0.065.
4 Discussion
Here we tested whether there is a neutral point in the perception of softness. We found that measured neutral points (i.e. PSEs) changed with the range of the stimulus set but they were different from the middle stimulus of the set even if participants had more time to learn the range of variability in each stimulus set. This showed that the results of [8] could not be explained just by the strategy of participants to choose the middle stimulus. However, the neutral points seems to change with the stimulus set. This could be due to range and adaptation effects.
Range effects describe distortions in people’s reactions depending on the range of stimuli presented in the experiment [16]. This bias often includes a central tendency. However, it was shown that range effects can be avoided if the stimulus range corresponds to the range of lifelong experience [17]. Indeed, we found the largest deviation of the measured neutral point from the middle stimulus towards softer values in the full set condition, which included almost the entire reference system of lifelong perceived softness ranging from hard ceramic to very soft foam. This result is consistent with the idea that there is a unique neutral point in softness perception which is less distorted by range effects, if the stimulus range is wide enough. In future, a task in which the range of the stimulus set is less obvious, e.g. adjustment method, could be used to measure the neutral point.
It was shown that softness is susceptible to adaptation and adaptation effects suggest norm-based coding [12], similar to the representation of colours and faces. In such a representation adaptation would shift the neutral point towards the middle of the current stimulus range. However, we observed a drift away from the center of the set in the course of the experiment and towards softer values in each condition. This indicates that in the time range of our experiment adaptation played rather a minor role if any. Adaptation might be more important for short time ranges like in [12] or longer time ranges, e.g. adapting to the changing skin of one’s own finger with increasing age (cf. adaptation to age-related changes in lens pigment density [13]). It is a possibility that the drift of the measured neutral points in the different conditions rather reflects convergence to the unique neutral point.
It was speculated that the softness of one’s own finger might be the neutral point in the perception of softness [8]. Objects which deform the finger are classified as “hard” and objects which are deformed by the finger are classified as “soft”. The elasticity of the fingertip differs between people [18]. It can be speculated that the neutral point correlated with finger elasticity. In future, this relationship could be tested. Additionally, it would be interesting to manipulate the elasticity of the finger experimentally and measure the effect on the neutral softness.
Taken together our results indicate that there might be a neutral point in the representation of haptically perceived softness, however range effects may play a role.
References
Okamoto, S., Nagano, H., Yamada, Y.: Psychophysical dimensions of tactile perception of textures. IEEE Trans. Haptics 6(1), 83–91 (2012)
Tiest, W.M.B., Kappers, A.M.L.: Analysis of haptic perception of materials by multidimensional scaling and physical measurements of roughness and compressibility. Acta Psychol. 121(1), 1–20 (2006)
Srinivasan, M.A., LaMotte, R.H.: Tactual discrimination of softness. J. Neurophysiol. 3(1), 88–101 (1995)
Harper, R., Stevens, S.S.: Subjective hardness of compliant materials. Q. J. Exp. Psychol. 16(768984023), 204–215 (1964)
Cavdan, M., Doerschner, K., Drewing, K.: Task and material properties interactively affect softness explorations along different dimensions. IEEE Trans. Haptics 14(3), 603–614 (2021)
Lederman, S.J., Klatzky, R.L.: Hand movement: a window into haptic object recognition. Cogn. Psychol. 19, 342–368 (1987)
Tiest, W.M.B., Kappers, A.M.L.: Cues for haptic perception of compliance. IEEE Trans. Haptics 2(4), 189–199 (2009)
Friedman, R.M., Hester, K.D., Green, B.G., LaMotte, R.H.: Magnitude estimation of softness. Exp. Brain Res. 191(2), 133–142 (2008). https://doi.org/10.1007/s00221-008-1507-5
Matsui, K., Okamoto, S., Yamada, Y.: Relative contribution ratios of skin and proprioceptive sensations in perception of force applied to fingertip. IEEE Trans. Haptics 7(1), 78–85 (2014)
Metzger, A., Drewing, K.: Haptically perceived softness of deformable stimuli can be manipulated by applying external forces during the exploration. In: IEEE World Haptics Conference, WHC 2015, pp. 75–81. Institute of Electrical and Electronics Engineers Inc. (2015)
Metzger, A., Drewing, K.: Memory influences haptic perception of softness. Sci. Rep. 9, 14383 (2019)
Metzger, A., Drewing, K.: Haptic aftereffect of softness. In: Bello, F., Kajimoto, H., Visell, Y. (eds.) Haptics: Perception, Devices, Control, and Applications. LNCS, vol. 9774, pp. 23–32. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-42321-0_3
Webster, M.A.: Adaptation and visual coding. J. Vis. 11(5), 1–23 (2011)
Gerling, G.J., Hauser, S.C., Soltis, B.R., Bowen, A.K., Fanta, K.D., Wang, Y.: A standard methodology to characterize the intrinsic material properties of compliant test stimuli. IEEE Trans. Haptics 11(4), 498–508 (2018)
Schuett, H.H., Harmeling, S., Macke, J.H., Wichmann, F.A.: Painfree and accurate Bayesian estimation of psychometric functions for (potentially) overdispersed data. Vis. Res. 122, 105–123 (2016)
Poulton, E.C.: Range effects in experiments on people. Am. J. Psychol. 3–32 (1975)
Müller, F., Giesecke, D.: Lautheitskonstanz oder Range-Effekt? Ein Experiment zur Differenzierung zwischen Wahrnehmung und Skalierungseffekt (2012)
Xu, C., Wang, Y., Gerling, G.J.: Individual performance in compliance discrimination is constrained by skin mechanics but improved under active control. In: IEEE World Haptics Conference, pp. 445–450 (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Metzger, A., Lotz, A., Drewing, K. (2022). Neutral Point in Haptic Perception of Softness. In: Seifi, H., et al. Haptics: Science, Technology, Applications. EuroHaptics 2022. Lecture Notes in Computer Science, vol 13235. Springer, Cham. https://doi.org/10.1007/978-3-031-06249-0_7
Download citation
DOI: https://doi.org/10.1007/978-3-031-06249-0_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-06248-3
Online ISBN: 978-3-031-06249-0
eBook Packages: Computer ScienceComputer Science (R0)