
Abstract
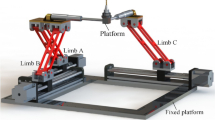
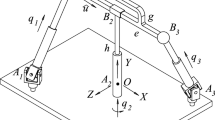
A novel four degree-of-freedom (DOF) Parallel Manipulator (PM) with a 2P Pa*PaR configuration is proposed to generate 3-DOF Translational and 1-DOF Rotational (3T1R) motions. This PM consists of a base, two identical limbs and a rigid moving platform, while each limb is driven by a prismatic joint and a revolute joint respectively through an orientation keeping mechanism and a parallelogram. The orientation keeping mechanism is made up of a link, two pulleys, and a belt. The advantages of the PM are symmetric geometry with fewer number of moving parts, simple kinematics with fewer singularity configurations, and infinite extension of translational workspace along its linear guide direction. Based on the 2P Pa*PaR PM, the mobility analysis is conducted by utilizing the screw theory, while a geometrical projection method is proposed to simplify the displacement analysis. A closed-loop vector approach together with variable elimination technique is employed for its velocity analysis, and the kinematic singularity issue is addressed by the rank analysis of Jacobian matrices. Finally, a numerical workspace generation algorithm is implemented for the workspace analysis.
Supported by the Zhejiang Provincial Key Research and Development Plan under Grant 2021C01069; the Ningbo Key Project of Scientific and Technological Innovation 2025 under Grant 2018B10069; and the Ningbo Key Project of Scientific and Technological Innovation 2025 under Grant 2018B10068.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Altuzarra, O., Sandru, B., Pinto, C., Petuya, V.: A symmetric parallel schönflies-motion manipulator for pick-and-place operations. Robotica 29(6), 853 (2011)
Angeles, J., Caro, S., Khan, W., Morozov, A.: Kinetostatic design of an innovative schönflies-motion generator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 220(7), 935–943 (2006)
Gauthier, J.F., Angeles, J., Nokleby, S.B., Morozov, A.: The kinetostatic conditioning of two-limb schönflies motion generators. J. Mech. Robot. 1(1), 011010 (2009)
Kim, S.M., Shin, K., Yi, B.J., Kim, W.: Development of a novel two-limbed parallel mechanism having schönflies motion. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 229(1), 136–154 (2015)
Krut, S., Benoit, M., Ota, H., Pierrot, F.: I4: a new parallel mechanism for scara motions. In: 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422). vol. 2, pp. 1875–1880 IEEE (2003)
Lee, C.C., Hervé, J.M.: Type synthesis of primitive schoenflies-motion generators. Mech. Mach. Theory 44(10), 1980–1997 (2009)
Li, Z., Lou, Y., Zhang, Y., Liao, B., Li, Z.: Type synthesis, kinematic analysis, and optimal design of a novel class of schönflies-motion parallel manipulators. IEEE Trans. Autom. Sci. Eng. 10(3), 674–686 (2012)
Nabat, V., de la O RODRIGUEZ, M., Company, O., Krut, S., Pierrot, F.: Par4: very high speed parallel robot for pick-and-place. In: 2005 IEEE/RSJ International Conference on intelligent robots and systems, pp. 553–558. IEEE (2005)
Pierrot, F., Reynaud, C., Fournier, A.: Delta: a simple and efficient parallel robot. Robotica 8(2), 105–109 (1990)
Pierrot, F., Company, O.: H4: a new family of 4-DOF parallel robots. In: 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No. 99TH8399), pp. 508–513. IEEE (1999)
Salgado, O., Altuzarra, O., Petuya, V., Hernndez, A.: Synthesis and design of a novel 3t1r fully-parallel manipulator. J. Mech. Des. 130(4), 042305 (2008)
Wu, C., Yang, G., Chen, C.Y., Liu, S., Zheng, T.: Kinematic design of a novel 4-DOF parallel manipulator. In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 6099–6104. IEEE (2017)
Xie, F., Liu, X.J.: Design and development of a high-speed and high-rotation robot with four identical arms and a single platform. J. Mech. Robot. 7(4) (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Zhao, J. et al. (2021). Kinematic Analysis of a Novel 4-DOF 3T1R Parallel Manipulator. In: Liu, XJ., Nie, Z., Yu, J., Xie, F., Song, R. (eds) Intelligent Robotics and Applications. ICIRA 2021. Lecture Notes in Computer Science(), vol 13016. Springer, Cham. https://doi.org/10.1007/978-3-030-89092-6_29
Download citation
DOI: https://doi.org/10.1007/978-3-030-89092-6_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-89091-9
Online ISBN: 978-3-030-89092-6
eBook Packages: Computer ScienceComputer Science (R0)