
Abstract
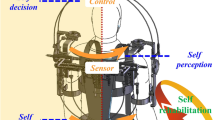
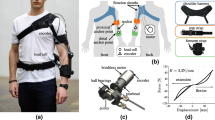
For person with bilateral shoulder disarticulation, powered prosthesis is highly needed. In late years, some experimental trials using electrically multi articulated powered prostheses has been achieved. However, these electrically powered prostheses are not so practical and hold unsolved problems such as its mechanism and control, fundamentally. To improve the functions, in this study, hydraulic-electric powered system were developed for a wearable prosthesis with 5 degrees of freedom. The wearable prosthesis can be supplied by the remaining functions of the human trunk to retain full workspace. In addition, this prosthesis can be used as a desktop mounted robot arm using an external attachment. This prosthesis have hydraulic bilateral servo actuator which combines the controllability of electric motor control and the high output of hydraulics. The joint mechanism is highly rigid mechanism without the use of speed reduction gear mechanism. A bi-articular muscle-type hydraulic bilateral servo actuator is used on the upper arm. Simultaneous and independent drive of the shoulder and elbow are possible with the one actuator. The mechanism and control of its upper arm with the bi-articular muscle-type hydraulic bilateral servo actuator are described in this study, in addition, sensor system using hydraulic pressure sensors which detect and avoid disturbance force is considered in this study for the safety control.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Kuiken, T.A., Li, G., Lock, B.A., et al.: Targeted muscle reinnervation for real-time myoelectric control of multifunction prosthesis. JAMA 301(6), 619–628 (2009). https://doi.org/10.1001/jama.2009.2.116
Funakubo, A., Yamaguchi, T., Saito, Y.: Motion analysis of human arms. Biomechanism 3, 97–103 (1975). (in Japanese)
Kato, I., Okada, Y., Ikeda, K.: Development of a hydraulic shoulder prosthesis. Biomechanism 3, 115–121 (1975). (in Japanese)
Higashihara, T., Saito, Y.: Mechanisms and engineering evaluation of a shoulder electric-powered prosthesis (TDU ys-86). Biomechanism 10, 227–237 (1990). (in Japanese)
Higashihara, T.: Present and future of control of prosthesis. J. Jpn Soc. Prosthet. Limbs 14(1), 16–25 (1998). (in Japanese)
Sakai, T., Saito, Y., Umemura, A.: A laparoscopic surgery training system and its application to a surgical support robot. Preprints from the 13th Japan IFToMM Conference Symposium, pp. 107–112 (2007). (in Japanese)
Higashihara, T., Oshima, T., Tamamoto, T., Ohnishi, K., Koyanagi, K., Saito, Y.: Mechanism and control of powered prosthetic arm using hydraulic bilateral servo actuators. Abstract of the 17th World Congress of the International Society for Prosthetics and Orthotics, Poster-5.075 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 CISM International Centre for Mechanical Sciences
About this paper

Cite this paper
Higashihara, T., Oshima, T., Tamamoto, T., Ohnishi, K., Koyanagi, K., Saito, Y. (2021). Mechanism and Control of Powered Prosthesis with Bi-articular Muscle-Type Hydraulic Bilateral Servo Actuator. In: Venture, G., Solis, J., Takeda, Y., Konno, A. (eds) ROMANSY 23 - Robot Design, Dynamics and Control. ROMANSY 2020. CISM International Centre for Mechanical Sciences, vol 601. Springer, Cham. https://doi.org/10.1007/978-3-030-58380-4_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-58380-4_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58379-8
Online ISBN: 978-3-030-58380-4
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)