
Abstract
Several studies highlighted differences in behavioral performance between the two hands, either due to hand dominance or to specialization of the brain hemisphere. In a previous study, right-handed individuals performed a bimanual isometric force-matching task with the arms in different configurations. There we found that the accuracy of the performance depended on the position of the left hand. Matching performance was worse when the left hand was in the lower position, regardless the symmetry of the arm configurations. In the present study, we tested the hypothesis that this effect is related to handedness, i.e., that in both right- and left-handed individuals the performance depends on the position of the non-dominant hand. Left-handed and age-matched right-handed participants were required to apply simultaneously the same amount of force in the upward direction, with the arms in symmetric or asymmetric configurations. No visual feedback of limb positions was provided. We found that for both groups the absolute and the signed (bias) difference of force between the sides depended on the position of the left hand. Thus, this role of the left arm was not determined by handedness, but likely by the specialization of the brain hemisphere. However, handedness influenced the performance: left-handers had a higher absolute error than right-handers in almost all conditions. No main effect of the left hand position was found for the variable error, but left-handers in most configurations had higher variable error when the left hand was in the lower position.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
About 89.5% of the world population prefers using the right hand [1] in the execution of various uni-manual motor tasks. This high number of right-handed individuals has led to a bias also in the study of sensorimotor abilities and motor control [2, 3]. In fact, the majority of researches on the upper limb focused only on right-handed individuals performing uni-manual tasks with their preferred arm, also called dominant arm. This approach reduces the experimental design complexity, but does not take into account the interaction between the two arms [4]. In addition, it limits the possibility to determine sensorimotor differences between left- and right-handed individuals (see also [2] for a review) and the ability to determine whether the upper limb asymmetries were due to the hand dominance or to a specialization of the brain hemisphere unrelated to handedness. Actually, some tasks showed upper-limb behavioral asymmetries in left-handed individuals identical to the right-handers, suggesting that these observed effects were not determined by handedness, but likely by the specialization of the brain hemisphere. For example, this is the case of stiffness [5] and weight perception [6]. In other tasks, instead, the upper-limb behavioral asymmetries, such as target reaching accuracy [7] and finger pinch movement discrimination [4], were found mirrored with respect to right-handers, suggesting that the observed effects were due to handedness. To explain upper-limb asymmetries Goble et al. [3, 7] proposed the dichotomous model, based on study on right-handed individuals. According to this theory, the dominant arm, in bimanual reaching and position matching tasks, relies more on visual feedback, whereas the non-dominant arm relies more on proprioceptive feedback. This model could also explain results on the sense of effort [8] and grasp force [9] in bimanual tasks. However, to the best of our knowledge the handedness effect on behavioral asymmetries has not been evaluated in bimanual force control tasks with both hands are actively engaged toward a common goal.
In a previous study on right-handed individuals [10], we investigated the ability to simultaneously apply an equal amount of isometric force in the upward direction with the two arms either in symmetric or asymmetric configurations. There, we found that performance was not influenced by the symmetry of the arms configuration, but by the position of the left hand, indicating a leading role of the non-dominant limb on the bimanual performance of such task. We hypothesize that this effect is related to the participants’ handedness and therefore that the results would be mirrored in left-handed individuals. For testing our hypothesis, in this study, we repeated the same experiment on a population of young left-handers and on an age-matched group of right-handers. Our hypothesis will be supported if in both populations the performance will depend on the position of the non-dominant hand. Conversely, if force performance will depend on the position of the left hand, results, contrary to our hypothesis, will indicate a hemispheric specialization in the brain, independent of handedness.
2 Materials and Methods
2.1 Experimental Set-up
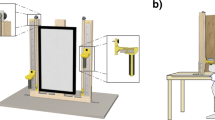
The experimental set-up has been previously described in [10]. Briefly, we used a device composed of a base plane and two vertical bars, each with a metal linear guide, where a custom-made handle could slide or be fixed (Fig. 1a). In this experiment, the handles were locked in fixed positions by a mechanical block. The force exerted on the handle in the upward direction was measured by a micro load cell (CZL635, Phidgets Inc; full range scale of 5 kg, precision of 0.05%; Fig. 1a, detailed view). The force recoded by the load cells were sent to a DAQ board (NI USB-6008, National Instruments) connected to a laptop via USB. The control software was developed in LabVIEW (National Instruments). During the experiment the participants were sitting in front of the device (Fig. 1b), on such way that to move the handles at the top of the metal guide they had to completely extend their arms. They had to grasp the handles, maintaining their thumb and index fingers in contact with the bottom surface of the plates (Fig. 1b, detailed view) and push in the upward direction. The view of their hands, arms and shoulders was blocked by a black curtain attached to the device for the entire duration of the experiment. The instructions were displayed on a screen placed in the middle of the two vertical bars.

(a) Rendering of the device. It is composed of a base plane and two vertical bars, each with a metal linear guide, where the handle could be fixed in different positions. Between the two bars there is a screen where a horizontal line indicates the target force that the participants have to match applying simultaneously the same amount of force with the two hands. The height of the blue bar in the screen is controlled by the sum of the force recorded by the load cells placed in the two handles, as shown in the detailed view. (b) Experimental set-up. Participants were sitting in front of the device grasping the two handles -as shown in the detailed view- locked in different configurations. A black curtain attached to the device prevented the visual feedback of the upper limbs. (Color figure online)
2.2 Protocol: Bimanual Isometric Force Matching Task
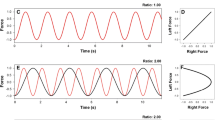
Participants were required to apply simultaneously the same amount of isometric force on both handles. In each trial the handles were placed in one of the four different configurations (HC; Fig. 2a) corresponding to all the possible combinations of two different heights, respectively 0.10 m (Down, D) and 0.30 m (Up, U) above the baseline position, i.e. handle in contact with the base plane. Accordingly, in two configurations the handles were in symmetric positions: both down (DD) or both up (UU) while in the other two they were in asymmetric positions: left down and right up (DU), and vice versa (UD). During each trial, participants did not receive any feedback of the force applied by each hand, but they could see on the device’s screen the total force exerted as a vertical bar whose height was equal to the sum of the two forces. On the screen we also provided the target force to match, displayed as a horizontal line that has to be reached by the bar controlled by the bilateral force applied by the participants (Fig. 1a). Two different target force levels were presented: 9.8 N or 19.6 N (Fig. 2b). Each target force was presented five times for each hand configuration, in random order, for a total of 40 trials (4 hand configurations * 2 target forces * 5 repetitions). To complete each trial, participants had to communicate to the experimenter when they reached the required amount of force and to maintain it for 0.5 s (holding time interval). There was no time constrain to complete each trial. If they attempted to apply the forces sequentially with the two hands an error message was provided and the trial was discarded.

Protocol of the bimanual isometric force matching task. The participants were asked to push upward the handles applying simultaneously equal isometric force with the two arms. (a) The handles could be placed in four configurations (two symmetric: DD, UU; two asymmetric: DU, UD). (b) We required to match one of the two possible levels of force: 9.8 N and 19.6 N. Each required target force has to be matched by the sum of the force applied to each handle.
A familiarization phase was performed before the task. During this phase, participants had the additional visual feedback of the force applied by each hand, displayed as two additional bars on each side of the main bar representing the total force. During this phase, they performed four trials, with different combinations of hand configuration and target force. Then, we asked if they correctly understood the task, otherwise they could extend the familiarization phase. The entire experiment lasted about 30 min; participants could rest anytime they needed, but they did not ask for any pause.
2.3 Participants
36 participants (20 females, aged 23–33 yo) voluntarily participated to this study. Before starting the experiment, we evaluated the hand dominance by the 10-item Edinburgh Handedness Inventory (laterality quotient (LQ) score −100: 100) [11]. Based on this score, we divided participants in two age-matched groups: 13 left-handers (LQ score below −50; 8 F; 25 ± 3 yo (mean ± std); LQ score: −86 ± 14) and 23 right-handers (LQ score above 50; 12 F; 26 ± 2 yo; LQ score: 75 ± 14).
Inclusion criteria were: (i) no evidence or known history of neurological disease; (ii) normal joint range of motion and muscle strength; (iii) no problems of visual integrity that could not be corrected with glasses or contact lenses, as i.e. they could clearly see the feedback displayed on the device’s screen. Each participant signed a consent form to participate in the study and to publish the results of this research. The research and the consent form were conformed to the ethical standards of the 1964 Declaration of Helsinki and approved by the local Ethical Committee.
2.4 Data Analysis
We focused on the difference of force applied by the two hands in the holding time interval. Our primary outcome was the Absolute Error (AE, Eq. 1), computed as the absolute value of the difference between the forces exerted by the left (\( F_{L} \)) and the right (\( F_{R} \)) arms, averaged for each participant over the N trials performed in the same experimental condition (i.e., same hand configuration and target force):
The absolute error could be influenced by two concurrent factors: (1) a systematic tendency to exert more force with one arm, i.e. the bias error, (2) a variable component accounting for trial-to-trial consistency, i.e. the variable error. Therefore, to further understand the participants’ performance we computed also these two errors as follow:
> Bias Error (BE, Eq. 2), as the signed difference of force applied by the two hands, averaged for each participant over the N trials performed in the same experimental condition:
> Variable error, as the standard deviation of the difference of force applied by the two hands over the N trials performed in the same experimental condition.
Statistical Analysis.
Our primary goal was to investigate whether the ability to exert equal isometric forces with the two arms in different configurations was influenced by handedness. The secondary goal was to verify if the performance of left-handed participants depended on the symmetry of the hand configuration, the position of the left hand and the target force. Using IBM SPSS Statistics 25 (International Business Machines Corporation), we performed a repeated-measures ANOVA on the three indicators (absolute, bias and variable error) with one between-subjects factor: ‘handedness’ (2 levels: left- and right–handed participants) and with three within-subject factors: ‘symmetry’ (2 levels: symmetric HC and asymmetric HC), ‘left hand position’ (2 levels: up and down), and ‘target force’ (2 levels: 9.8 N and 19.6 N). We verified the normality of the data using Anderson-Darling test [12]. The null hypothesis was rejected for the absolute and the variable error, thus these data were corrected applying the fractional rank method [13]. We tested for the sphericity of the data using Mauchly’s test, and it was verified for all indicators. We performed a post-hoc analysis (Tukey’s method) to further investigate statistically significant effects. Statistical significance was set at the family-wise error rate of α = 0.05 and applying Bonferroni correction for multiple comparison the threshold required for significance was set to α = 0.05/3 = 0.0167.
3 Results
Left-Handed Participants Had Worse Performance in the Bimanual Force-Matching Task.
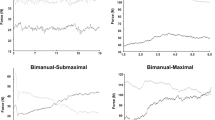
The absolute error (Fig. 3a) was influenced by handedness (group effect: F1,34 = 6.75; p = 0.014). Specifically, left-handers performed the task with a higher difference of force between the sides than right-handers. However, this population effect for each participant could be due to the bias or to the variable error, as well as to their combination, regardless of handedness. Indeed, for both the bias and the variable errors (Fig. 3b and 3c), the handedness main factor did not reach the threshold of significance (bias and variable error: p > 0.05).

Indicators of performance computed on the difference between the forces applied by the left and the right hand in terms of: (a) absolute error, (b) bias error and (c) variable error. Each indicator has been reported for the four hand configurations (symmetric: DD and UU; asymmetric: DU and UD, with D-down and U-up are the lower and the higher position respectively, and the first and the second letter are the position of the left and the right hand respectively). The left hand in ‘U’ position is represented by the ‘x’ symbol, while in the ‘D’ position by the ‘diamond’ symbol. Data are reported separately for each target force: white background indicates 9.8 N, light gray background 19.6 N. All the panels show the results (mean ± SE) separately for the left- and the right- handed population (in light blue and dark gray, respectively). (Color figure online)
The Bimanual Performance was Influenced by the Position of the Left Hand Regardless of Handedness: also in Left-Handed Participants the Difference of Force Applied by the Two Hands Depended on the Position of the Left Hand and Not of the Non-dominant (Right) Hand.
The absolute error significantly depended on the position of the left hand for both groups (left hand position effect: F1,34 = 22.09; p < 0.001), i.e. when the left hand was in the lower position the absolute error was higher. This could be explained by the bias error, which showed that participants of both groups tended to apply more force with the left hand when it was in the lower position (left hand position effect: F1,34 = 16.44; p < 0.001). However, this effect was more marked when the hands were in asymmetric configurations, i.e., the performance were not different in symmetric configurations (symmetry*left hand position interaction: F1,34 = 16.00; p < 0.001; post-hoc: DD-UU: p = 0.759; DU-UD: p < 0.001). As for the variable error, no effect of the left hand position was found in the overall population (left hand position effect: p > 0.05), while only the left-handers in most configurations (3 out of 4) had higher variable error when the left hand was in the lower position (left hand position*group interaction: F1,34 = 11.86; p = 0.002). For all the three indicators there were not significantly main effect of the symmetry of the arm configuration (symmetry effect: absolute, bias, and variable error: p > 0.05), consistently for both groups.
The Error was Influenced by the Required Total Amount of Force, Regardless of Handedness.
The level of the target force had a significant - or close to significance - effect on all the three indicators (absolute-error: F1,34 = 6.89; p = 0.013; variable-error: F1,34 = 11.86; p = 0.002; bias-error: F1,34 = 6.22; p = 0.018), i.e. as expected these indicators were higher for higher target force, regardless of handedness, symmetry of the hand configuration and position of the left hand (all interactions for all indicators: p > 0.05).
All the above-mentioned results were confirmed also on the sex-matched subgroup.
4 Discussion
The Difference of Force Applied by the Two Hands in Term of Absolute Error was Influenced by Handedness in all the Experimental Conditions.
Indeed, left-handed participants had higher absolute error than right-handed participants. This result supports the conclusions of previous studies, such as [4], suggesting that bimanual proprioception was less accurate in left-handed individuals. This study extends this finding to a bimanual isometric force matching task, where participants integrated the proprioceptive information from their arms positioned in symmetric or asymmetric configurations, not relying on visual feedback.
Bimanual Force Matching Performance Depended on the Position of the Left Hand Regardless the Handedness, i.e. the performance seemed to be influenced by the specialization of the brain hemisphere, evolving independently from handedness. The significant effect of the left hand position in right-handed individuals [11] was supported by the dichotomous model [3] observed in motor [7] and force tasks [8, 9]. This model suggests that during bimanual activities, the dominant right arm relies more on visual feedback, while the non-dominant left arm on proprioceptive feedback. Thus, in our experiment, where participants could not rely on visual feedback, the left arm might be advantaged and play a key role in solving the task. The present study on left-handed individuals extends this finding, suggesting that the observed asymmetry in bimanual force matching performance with different arm configurations could be due to a specialization of right hemisphere, evolving independently from handedness. This result is also supported by a study [14] on people with unilateral stroke, suggesting a specific contribution of the right hemisphere in controlling the production of bilateral force. Also other studies found a specialization of the right hemisphere in different but related tasks, such as controlling limb impedance for stabilizing limb position at the end of movement [15] and generating force for adapting to dynamic variation, such as unexpected perturbation [16]. Note that the signed difference between the forces applied by the two hands was higher and significant when the two arms were in asymmetric configurations. This was expected, since in this case the central nervous system has to apply different neural commands for each side of the body, accounting for the difference in arm configuration. However, humans have a universal tendency to perform coordinated bimanual movements, by activating homologous limb muscles in synchrony (e.g. [17]). The present results suggest that this tendency could be present also in bimanual isometric force matching tasks, explaining at least in part the more similar performance in symmetric configurations. We also found that the performance variability was partially influenced by handedness, since only left-handed individuals tended to have higher variability when the left hand was in the lower position than in the other configurations. A crucial role of the right hemisphere for variability of bilateral force control has been suggested in [14], but its interaction with handedness has not been extensively studied.
The Error is Influenced by the Required Total Amount of Force, Regardless of Handedness.
The total amount of the requested force had a relevant effect on the performance, increasing the difference between the two hands and its variability. Further, the bias error highlighted that the left hand applied more force than the right for the lower target force, but this effect was decreased and even inverted for the higher target force, consistently with previous results in sequential [8, 9] and concurrent [10] matching task. The results of the present study extend the previous findings, highlighting that this effect was not influenced by the handedness.
Limitation and Future Directions.
The results obtained in the right-handers were consistent with what reported [10] for both the absolute and the bias error. Instead, the variable errors in our young participants were lower and in a different relation to hand configurations. The difference was due to the older participants included in the previous study who had significantly higher variable errors, as found also in [18]. We plan to further investigate the influence of aging on this specific task in a future study.
References
Papadatou-Pastou, M., et al.: Human handedness: a meta-analysis (2020)
Elliott, D., Chua, R.: Manual asymmetries in goal-directed movement. In: Elliott, D., Roy, E.A. (eds.) Manual Asymmetries in Motor Performance, Boca Raton, CRC (1996)
Goble, D.J., Noble, B.C., Brown, S.H.: Proprioceptive target matching asymmetries in left-handed individuals. Exp. Brain Res. 197(4), 403–408 (2009)
Han, J., et al.: Bimanual proprioceptive performance differs for right- and left-handed individuals. Neurosci. Lett. 542, 37–41 (2013)
Leib, R., et al.: Force feedback delay affects perception of stiffness but not action, and the effect depends on the hand used but not on the handedness. J. Neurophysiol. 120(2), 781–794 (2018)
Buckingham, G., et al.: Handedness, laterality and the size-weight illusion. Cortex 48(10), 1342–1350 (2012)
Goble, D.J., Brown, S.H.: Upper limb asymmetries in the matching of proprioceptive versus visual targets. J. Neurophysiol. 99(6), 3063–3074 (2008)
Scotland, S., et al.: Sense of effort revisited: relative contributions of sensory feedback and efferent copy. Neurosci. Lett. 561, 208–212 (2014)
Mitchell, M., et al.: Upper limb asymmetry in the sense of effort is dependent on force level. Front. Psychol. 8(APR), 1–8 (2017)
Ballardini, G., et al.: Interaction between position sense and force control in bimanual tasks. J. Neuroeng. Rehabil. 16(1), 1–13 (2019)
Oldfield, R.C.: The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9(1), 97–113 (1971)
Anderson, T.W., Darling, D.A.: A test of goodness of fit. J. Am. Stat. Assoc. 49(268), 765–769 (1954)
Friedman, M.: The use of ranks to avoid the assumption of normality implicit in the analysis of variance. J. Am. Stat. Assoc. 32(200), 675–701 (1937)
Kang, N., Cauraugh, J.H.: Right hemisphere contributions to bilateral force control in chronic stroke: a preliminary report. J. Stroke Cerebrovasc. Dis. 27(11), 3218–3223 (2018)
Mani, S., et al.: Contralesional motor deficits after unilateral stroke reflect hemisphere-specific control mechanisms. Brain 136(4), 1288–1303 (2013)
Mitrovic, D., et al.: A computational model of limb impedance control based on principles of internal model uncertainty. PLoS ONE 5(10), e13601 (2010)
Swinnen, S.P.: Intermanual coordination: from behavioural principles to neural-network interactions. Nat. Rev. Neurosci. 3(5), 348 (2002)
Shim, J.K., et al.: Age-related changes in finger coordination in static prehension tasks. J. Appl. Physiol. 97(1), 213–224 (2004)
Acknowledgement
This study was supported by Ministry of Science and Technology, Israel (Joint Israel-Italy lab in Biorobotics “Artificial somatosensation for humans and humanoids”).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2020 The Author(s)
About this paper

Cite this paper
Ballardini, G., Casadio, M. (2020). Isometric Force Matching Asymmetries Depend on the Position of the Left Hand Regardless of Handedness. In: Nisky, I., Hartcher-O’Brien, J., Wiertlewski, M., Smeets, J. (eds) Haptics: Science, Technology, Applications. EuroHaptics 2020. Lecture Notes in Computer Science(), vol 12272. Springer, Cham. https://doi.org/10.1007/978-3-030-58147-3_22
Download citation
DOI: https://doi.org/10.1007/978-3-030-58147-3_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-58146-6
Online ISBN: 978-3-030-58147-3
eBook Packages: Computer ScienceComputer Science (R0)