
Abstract
In September 1967 an important shipwreck site was discovered near the islet of Gnalić in Northern Dalmatia (Croatia). It immediately raised significant interest in the scientific community and the broader public. Due to logistical and financial issues, the excavation ceased after five short-term rescue research campaigns, over a total duration of 54 working days. Renewed interest in the site, particularly the hull remains, resulted in reviving the project after 45 years. The trial campaign, carried out in 2012, had a positive outcome, and the excavation has continued annually in a systematic way. The nature of the site demanded significant effort to document the excavated areas. Considering all the temporal restrictions caused by various reasons, photogrammetry proved to be an extremely helpful and efficient tool.
You have full access to this open access chapter, Download chapter PDF
Similar content being viewed by others


Keywords
4.1 Introduction
During the past decade, photogrammetry has rapidly developed from a sophisticated skill practiced by a small group of devoted experts with appropriate equipment and special software, to a broadly available tool, which can be undertaken with few restrictions regarding educational level, professional background or virtual-modelling experience. Applying the photogrammetric process throughout a demanding ongoing underwater archaeological excavation has allowed the authors to experience the benefits and limitations of the photogrammetric recording of cargo, equipment and hull remains, and to exploit its positive features.
Since its beginning, the Gnalić project team consisted of experts with significant underwater research experience, young researchers devoted to the application of new technologies, and enthusiastic students and volunteer divers. This diverse group conducted a series of experiments which targeted the development of an efficient photogrammetric recording system. The goals were to produce a seamless integration into traditional photographic recording, improved monitoring of the excavation process, and ultimately the production of enhanced images and material for public outreach. After five consecutive years of site experience, the authors report the outcome of this operation, in order to share experience and recommend best practices for the scientific community, to enhance the recording and processing steps from the perspective of the various levels of end users, and ultimately to improve underwater photogrammetric recording results.
It is important to emphasize that the implementation of the photogrammetric recording process was not the consequence of pre-planned systematic activity on the shipwreck site, but resulted from spontaneous positive collaboration between multiple team members with various expertise. They invested their time and effort into finding optimum solutions within the framework of a project with an extremely limited budget, fully exploiting the advantages of the development of broadly available equipment and software coupled with the creative atmosphere in the field. After 5 years, photogrammetry became one of the indispensable components of our recording methodology, not replacing but complementing the traditional organization of the underwater research.
4.2 The Shipwreck of Gnalić
The shipwreck of Gnalić, was officially found in 1967. Local divers relocated the site in the early 1960s, but it was only revealed to local authorities in 1967. It is one of the most important sixteenth-century shipwreck sites discovered to date. Besides the variety of cargo containers and cargo of various origins, precisely dated guns from the Alberghetti workshop, and the well-preserved portion of the hull, its importance is reflected in hundreds of archival documents, which clearly define its cultural, historical, social, economic and political context.
The shipwreck belongs to a group of sites in Croatian waters which were partly salvaged in the past. Unfortunately, for many wrecks found in the decades following the 1960s, both public opinion and responsible institutions considered a set of short rescue campaigns sufficient. However, the outcome of the Gnalić project, revived after 45 years, has clearly demonstrated the opposite. The importance and history of the ship also exceeded all expectations.
4.2.1 History of Research
The initial report of this important discovery led to immediate action by Ivo Petricioli, professor at the Department of Archaeology and Art History of the Faculty of Humanities and Social Sciences in Zadar, to rescue the ship’s cargo. Three rescue campaigns were conducted in 1967 and 1968 (Petricioli and Uranija 1970), with an additional two campaigns in 1972 and 1973 (Petricioli 1981; Božulić 2013; Radić Rossi et al. 2016). In 1973, the Italian art historian Astone Gasparetto (1973) proposed an identification of the ship based on the archival research conducted at the State Archive of Venice.Footnote 1 According to Gasparetto, the shipwreck remains corresponded to that of Gagiana (Gaiana, or Gagliana), sunk ‘in the waters of Murter’ or ‘in the waters of Biograd (Zara Vecchia)’ in autumn 1583.
After years of neglect, Zdenko Brusić attempted to restart the excavation in 1996, but his attempt was unsuccessful due to administrative issues. Nevertheless, his attempt resulted in a comprehensive summary of what was known from the previous underwater research based on the old documentation (Brusić 2006: 78, Fig. 2). Then, in 2004, the range of glass from the ship’s cargo was published (Lazar and Wilmott 2006), and a colourful overview of the most attractive finds, targeted at the general public and fund raising (Mileusnić 2004).
Finally, a partial excavation of the shipwreck took place in 2012, providing a unique opportunity to verify the archaeological potential of the site, which proved decisively high (Radić Rossi et al. 2013).Footnote 2 Systematic research began in 2013, and through October 2017 has encompassed approximately 200 m2 of ship remains and seabed examination.
4.2.2 The Ship
For decades, knowledge about the ship relied mostly on the cargo items, a modest selection of underwater sketches and photographs, several recovered elements of the hull preserved in the Local Heritage Museum of Biograd na Moru (Beltrame 2006), and Gasparetto’s proposed identification. This situation has drastically changed since 2012 through the systematic examination of both archaeological and historical sources.
4.2.2.1 Historical Documents
The identification of the vessel proposed by Gasparetto in 1973 has been fully confirmed by the archival research conducted in parallel with the renewed excavation efforts (Radić Rossi et al. 2013).Footnote 3 The heavily loaded merchantman sunk at the islet of Gnalić in early November 1583 was in fact Gagliana grossa—a merchantman with a capacity of 1200 Venetian barrels (Ven. botti), i.e. around 700 tons (Lane 1934; Tucci 1967), and an estimated length of 35–40 m.
The ship was built in Venice in 1567–1569, and successfully launched. The Ottomans captured the vessel near Valona, in Albania, during the War of Cyprus (1570–1573), and it remained in Ottoman hands for 10 years. In 1581, it was sold in Pera, Constantinople, to the Christian merchant Odoardo da Gagliano. Following the usual trading route between Venice and Constantinople, the ship sunk in 1583 near the islet of Gnalić, in northern Dalmatia, while carrying a valuable cargo for the Sultan Murat III (Radić Rossi et al. 2013: 86). The most precious part of the cargo was salvaged between December 1583 and February 1584, and the remaining part and the ship’s hull lay undisturbed on the bottom for almost 400 years.
4.2.2.2 Archaeological Sources
In the 1990s, Zdenko Brusić reviewed the documentation from the previous Gnalić shipwreck interventions, and consolidated all of the archaeological information available from the plans, sketches and reports (Fig. 4.1a, b). Based on the presumption that the ship lay on its keel, with its bow to the west, and considering the armament items previously recovered, he suggested the interpretation of the ship as a heavy merchant galley (Brusić 2006: 80). Gasparetto, however, had already challenged this mind by 1973, and in 2006 Carlo Beltrame, relying on information provided by Mauro Bondioli and earlier images of the site, determined that the ship sunk at Gnalić was not a galley but a round ship.Footnote 4

(a and b) The two sketches indicating (a) the main groups of finds noticed during the rescue operations 1967–1973 and 1996; and (b) the wooden elements of the hull noticed in the trenches, and the surface layer (Z. Brusić), with the position of the hull remains shown bottom right on drawing (b)
The recent archaeological work has also added more detail to our understanding of the remains of the Gnalić shipwreck. Excavation in the western part of the site allowed for the examination of exposed elements of the hull, which led to the conclusion that the keel area should be identified along the northern extremity of the site. The missing deadwood in the stern area had left a gap that was tentatively identified as a big crack, but this interpretation was corrected after excavation of the broader surface and correct identification of the keel.
The area covered by the surface finds, estimated from sidescan sonar and sub bottom profiler survey results,Footnote 5 measures approximately 15 × 60 m, with a maximum thickness of 1.5 m of sediment above the hull (1350 m2 in total). The six excavation campaigns to date, including the test campaign carried out in 2012, lasted in total 330 days, with 200 m2 of the site exposed. The complete recovery of the artefacts and detailed cleaning of the hull has been completed for 140 m2—the excavation of the remaining surface area will be carried into future archaeological campaigns.
The Gnalić shipwreck documentation encompasses both traditional recording procedures and photogrammetric recording of the excavation progress. In accordance with the aim of this publication, the following text presents the experience of the photogrammetric recording of the Gnalić shipwreck excavation from 2012 to 2016 through the description of data acquisition and processing, and it discusses the advantages and limitations as experienced by experts with various responsibilities within the research team.
4.3 Systematic Photogrammetric Recording of Site and Finds
Considering the importance of the Gnalić shipwreck, the project’s demanding underwater research conditions, limited financial resources and consequently small time frame, and the ever-present threat of losing information, the recording process had to be extremely efficient. The documentation process focused on:
-
1.
Developing an accurate site plan, based on multi-layered information;
-
2.
Recording the advancement of the excavation during each campaign;
-
3.
Combining the results of each excavation campaign;
-
4.
Continuously mapping the spatial distribution of finds before recovery;
-
5.
Accurate recording of the hull;
-
6.
Documenting material for future scientific presentation of the research; and
-
7.
Producing material for public promotion of the project.
The initial Gnalić site recording process in 2012 followed the traditional system of tagging, measuring, drawing, photographing and video recording. Relying on the direct experience of the photogrammetric recording of the Late Roman shipwreck of Pakoštane, Croatia, carried out within the framework of an international project directed by the University of Zadar and Centre National de la Recherche Scientifique (CNRS)—Centre Camille Jullian, France,Footnote 6 and its contribution to the documentation process (Dumas 2012), it was apparent that photogrammetry should not be omitted from the organization of the underwater work. Even with that prior experience, it was challenging to ensure everything was available to guarantee the correct execution of the operation. The first attempt of photogrammetric assessment of the site, during the 2012 trial campaign, however, was extremely encouraging and resulted in photogrammetry becoming an essential part of the recording procedure.
The rapid development of the software, which became readily available and increasingly user friendly, combined with the effort in developing and testing the recording system, resulted in what is reported in the following text.
4.3.1 Trial Campaign 2012
The Gnalić shipwreck excavation restarted in 2012 in the form of a trial campaign, which lasted just 10 working days.Footnote 7 The team consisted of 15 divers, who each spent 30 min twice a day on the seabed. The area chosen for the trial excavation was a transversal cross section of the ship in the western part of the site—an area that had been previously excavated. This choice was influenced by the need to check the state of the preservation of the hull in an area that had been exposed previously and where all artefacts already would have been recovered.
It would be easy to focus on inadequate documentation inherited from the past projects, and the un-systematic assessment of the excavated areas—instead, it should be stressed that the first researchers did an excellent job of preserving the site and its finds for the future. They worked under completely different conditions, without any experience, logistics and expertise in underwater archaeological excavation. Yet, they demonstrated in fieldwork reports the highest level of awareness of the importance of the shipwreck site and a strong desire to systematically study all of its components (Radić Rossi et al. 2013: 70, 73). Therefore, everything accomplished in the restarted Gnalić project carries out respect for what was done in the past and is an attempt to realize the dream of those pioneering researchers.
At the beginning of the campaign, a metal grid, composed of seven squares each 2 × 2 m, was positioned across the site, and the excavation started simultaneously from its northern and southern edge. It should be stressed that it is usually thought that the main function of the grid is accurate documentation. This may have been true during the early development of underwater recording, but today its main function certainly exceeds documentation issues. Based on extensive fieldwork experience, with much effort invested in the training of students and amateur scientific divers, two main purposes significantly justify the positioning of the solid grid over large, delicate surfaces. First, the grid provides solid support for divers—they can rest on it while working without moving finds or disturbing the site regardless of the task they are undertaking (excavating, photographing, filming, sampling, recovering artefacts, etc.). Another important function of the grid is the orientation of the diver, i.e. reducing to a minimum any possible confusion of their assigned work area.
It was observed in 2012, however, that the grid presents a serious obstacle to accurate photogrammetric recording if the target area exceeds the surface of a single square. Therefore, during all the photogrammetric recording operations in the following years the grid was removed from the excavated areas before capturing photos, and repositioned after the operations were completed.
The trial photogrammetric recording in 2012 was led by Pierre Drap from CNRS’ Laboratory of Information Systems and Technology (LSIS) he and his team joined the excavation for 3 days. The more complex methodology and sophisticated computer programs applied at that time are no longer in use (P. Drap, personal communication). This initial photogrammetric recording was mainly targeted to demonstrating what can be relatively quickly and easily obtained through the systematic photographic recording of the excavated area (Fig. 4.2), or bigger areas in relation to the distribution of the surface finds (Fig. 4.3).

The photogrammetric model of the part of the hull exposed in 2012 at the northern edge of the excavation area (P. Drap)

Photogrammetric model of the situation on the western half of the site in 2012, comprising a mound of ballast stones, a row of barrels filled with intensely red hematite powder, and exposed wood (P. Drap)
As discussed, the main goal of the trial excavation campaign was to check the presence of the cargo items and the state of preservation of the wooden elements of the hull in order to verify the need to restart the project. Therefore, it did not focus on the accurate cleaning and recording of the hull structure, which in any case would have been impossible in just ten working days. Thus, photogrammetry was the best solution for quick data collection and visualization of the situation on the seabed.
4.3.2 Research Campaign 2013
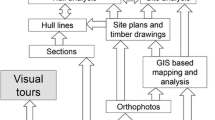
During the 2013 excavation campaign, a team led by José L. Casabán conducted the 3D photogrammetric recording of the remains of the Gnalić shipwreck covering a total surface of 300 m2 at an average depth of 25 m (Fig. 4.4). The methods applied included the trilateration of a network of control points and the photographic coverage of the shipwreck remains (Casabán et al. 2014). The images were later aligned using Agisoft PhotoScan/Metashape to produce a dense point cloud and a mesh, representing the surface of the shipwreck including its artefacts and hull remains. The model was georeferenced using a network of control points and, finally, a texture was added to the model based on the images. An orthophoto of the shipwreck was then generated from the photogrammetric model and imported into AutoCAD Map 3D to trace a site plan, while longitudinal and transversal sections were extracted from the photogrammetric model. The orthophoto plans and sections were integrated into a GIS database to perform spatial analysis.

Site area documented photogrammetrically, 2013 Gnalić Research Campaign (J.L. Casabán)
4.3.2.1 Control Points and Multi-image Coverage of the Site
The first step of the photogrammetric recording of the Gnalić shipwreck was the creation of a network of control points to georeference the photogrammetric model and the orthophoto generated from the multi-image coverage of the site. The georeferencing system, which was applied for the multi-image coverage of the Gnalić shipwreck, was pioneered at the Institute of Nautical Archaeology (INA) excavations of the Classical shipwreck at Tektaş Burnu (Turkey) between 1999 and 2001 (Green et al. 2002: 284, 288–290), the Archaic Greek shipwreck at Pabuç Burnu (Turkey) in 2002–2003 (Polzer 2004: 3–11), and the Phoenician shipwreck at Bajo de la Campana (Spain) in 2007–2011 (Polzer and Casaban 2012: 12–14). This method is based on a series of control points evenly distributed over the site, which also appear in the photographic coverage of the mapping area. The x, y and z coordinates of each point are obtained through 3D trilateration or ‘Direct Survey Measurement’ (DSM), and depth measurements (Bowens 2008: 127–128). In other words, the distances between the points are measured using measuring tapes, while their depths are determined with diving computers. Then, all the linear data acquired in this way is processed on a laptop using Site Recorder SE, a software program which calculates the 3D position of each point based on the linear measurements and depths. The RMS residual for network of control points produced with Site Recorder SE for the 2013 photogrammetric recording of the Gnalić shipwreck was 15 mm, using a distance and depth adjustments of 40 mm and 100 mm (Fig. 4.5). In addition to the control point network, four scale bars were placed on different parts of the mapping area to provide extra measuring references. Finally, six additional distance and depth measurements were taken in specific areas of the site to determine the accuracy of the resulting photogrammetric model. The distances were taken with a measuring tape while the depths were measured using the same dive computer (Suunto Vyper) employed for the network of control points. All these extra measurements were added to the final processing of the photogrammetric model to strengthen the precision of the control point network.

Control points network, 2013 Gnalić Research Campaign (J.L. Casabán)
After the control points were positioned on the site, a multi-image photographic survey of the site was conducted ensuring that all the site features, control points, and scale bars showed in the photographs taken. The images required a 60% vertical overlap and 80% horizontal overlap to ensure an optimum photographic coverage of the shipwreck remains.Footnote 8 The multi-image coverage of the different areas of the shipwreck was conducted in 2013 using a Nikon D200 DSLR camera equipped with a single manual strobe light that required calibration under water at the beginning of each dive. A single diver carried out the photographic coverage of the site, following parallel and transversal transects to produce enough overlap between the images. Additional photographs of particular areas of the site were taken from different angles to ensure that each part of the shipwreck was visible from at least two camera locations, and to minimize blind spots which could hinder analysis of archaeological features. A few of these blind spots still occurred, however, since the photographic coverage was mainly conducted perpendicularly to the surface of the hull remains and the time limitations of the project did not allow additional photos to be taken from different angles in all cases. Despite this inconvenience, it was still possible to produce an accurate and detailed orthophoto of the hull remains of the Gnalić shipwreck. The multi-image coverage of the excavation area was conducted several times during the archaeological season to document the different stages of the archaeological work.
The images taken following this method were then processed using Adobe Photoshop to improve their quality by manipulating the image settings such as white balance, exposure, contrast, brightness, and clarity. The image corrections were intended to ensure the best quality of the resulting photogrammetric model and the orthomosaic since the visibility conditions on site were not always ideal, and varied from 1 day to the next depending on the currents and the excavation work.
4.3.2.2 Image Processing, 3D Model, and Orthophoto Generation
After corrections, the images were processed following general workflow tasks in Agisoft PhotoScan/Metashape, until the mesh model of the shipwreck was created. At this stage, the control points that appeared in the photos were plotted manually on the model using the program tools. Then, the x-, y-, and z-coordinates of each control point were loaded into Agisoft PhotoScan/Metashape. This allowed for the georeferencing and optimization of the photogrammetric model using all the coordinates and measurements taken previously, providing a method to check the accuracy of the model. Finally, a texture based on the multi-image coverage of the site was added to the model and a 1:1 orthomosaic of the site was generated (Fig. 4.6).

Orthomosaic of the hull remains, 2013 Gnalić Research Campaign (J.L. Casabán)
The georeferenced orthomosaic was imported into AutoCAD Map 3D, a software package which combines the Computer Aid Design (CAD) tools and the main data formats used in Geographic Information Systems (GIS) to trace a 2D site plan directly from the orthomosaic in real scale (Fig. 4.7). In addition, several longitudinal and transversal sections of the hull remains were obtained from the photogrammetric 3D model of the site using software packages such as Rhinoceros or Autodesk Maya.

Tracing of the hull remains of the Gnalić ship based on the 2013 orthomosaic (J.L. Casabán)
4.3.2.3 GIS Analysis
Finally, both the georeferenced orthophotos and site plans were integrated into ESRI ArcGIS to manage and to analyse the photogrammetric data combined with other types of information generated in any archaeological project. In this case, the GIS database is used as a tool to produce more rapidly different types of site plans that a trained nautical archaeologist will use to interpret the hull remains (see Steffy 1994: 191–250). In order to analyse the photogrammetric information provided in the orthophotos, the archaeological features and hull components represented in the site plans generated from the orthophotos would be linked to the hull catalogue compiled during the excavation. The catalogue includes the descriptions of the different hull timbers, their dimensions, types of wood, and any other observation and interpretation made by the archaeologists during the excavation of the hull remains.
The GIS database would be used then to perform different types of analyses in order to understand the site formation sequence based on the spatial distribution of hull timbers and related artefacts. In addition, different site plans of the site will be generated based on the data gathered in the timber catalogue. The criteria employed to produce the different set of plans would include the type of hull components (stem, keel, sternpost, keelson, frames, planking, ceiling planking, and other components), dimensions, types of wood used for the construction of the hull, visible scarfs and butts, and other structural components. Separate plans showing the location of scattered small finds, such as nails, will also be produced because they could provide information about hull components that were not preserved.
The analysis of the information provided in the different sets of plans generated with ESRI ArcGIS tools will be used by nautical archaeologists to understand the design and construction sequence of the vessel, including hull modifications or repairs occurred during its operational life, using reverse engineering. This information was later combined with the hull lines obtained from the mesh of the photogrammetric model in order to produce the lines drawings of the hull and, finally, the construction drawings.
4.3.3 Research Campaign 2014
In 2014, the photogrammetric recording on the Gnalić shipwreck site continued. This year the recording team, led by Kotaro Yamafune and Rodrigo Torres, experimented with slightly different methods.
4.3.3.1 Local Coordinate System
At the start of the season, a new local coordinate system was established using control network around the site. While a local coordinate system had been established in 2013, it had been difficult to create secured control points of trilateration because of the shortage of time.
It was decided to create a local control network, in order to make sure all the recording throughout the season could be related to the same x, y, z datum, providing a 4D recording strategy (x, y, z, t) which could accommodate photogrammetry, but also triangulation and grid offset plotting, if necessary. Moreover, once the local coordinate system was re-established in 2014 (Yamafune et al. 2016), it was possible to apply it to 2013 photogrammetric models using/creating the common points, such as tags of timbers that had been retained for both field seasons. The extracted x, y, z, coordinates from the common points of 2014 models were subsequently applied to the 2013 model.
The method used to establish a local coordinate system, according to conventional DSM-techniques (Atkinson et al. 1988; Rule 1989) has been published by Yamafune (2017). Regular fibreglass measuring tapes were employed for distance measurements and a diving computer for depths (10−3 and 10−1 reading resolutions, respectively). Depth measurements of all control points were taken as quickly as possible, with the same dive computer (UWATEC Aladin Ultra) to keep consistency and minimize the effect of tidal variation. Depth readings at the reference datum (D1) were recorded before and after each DSM measurement session, to function as a vertical datum and reference for tide correction throughout the excavation (Fig. 4.8).

Local coordinate network of the Gnalić shipwreck site (R. Torres, K. Yamafune)
Once the statistical (‘Best Fit’) adjustment provided by Site Recorder 4 SE (RMS 0.006 m, in this case) was considered satisfactory, a report was exported in .txt format into MS Excel. A clean x, y, z spreadsheet was then produced, with coordinates from Site Recorder 4 SE adjustment. Since this adjustment produces a network which is correctly scaled but not georeferenced, however, the spreadsheet was transferred to ESRI ArcGIS 10.1 for spatial orientation and coordinates transformation.
To do so, two control points which run across the ship’s axis were chosen (in this specific case, D1 and D5) to act as the excavation baseline. Then a temporary tight reel line from D1 to D5 was laid, and careful magnetic compass bearing was taken. With the help of the Internet (NOAA 2018) the magnetic deviation was calculated based on the inserted date and site coordinates, in order to provide models and orthophoto site plans with true north.
When the network was locked and transformed, six more internal secondary control points (SCP; 12bit water-proofed Agisoft PhotoScan/Metashape coded targets) were added in the system. These SCP were then trilaterated to fit into the primary control network, and x, y, z coordinates were derived for them. The SCP coordinates were used to spatially reference all partial photogrammetry models produced throughout the season, allowing for the overlapping, matching, and scaling of the models and orthophotos. Scale bars were also used to calibrate scaling on each recording/photo-shooting session. Here is where the 4D excavation control should start, plotting artefacts, layers, 3D models, etc. It is important to highlight that the strategy was conceived to allow for in-field processing and on-the-fly excavation feedback.
4.3.3.2 Composite Models
The second experimental approach tested on the 2014 campaign was the development of ‘composite’ photogrammetric models. Operational experience found that the calculation power of the project computer was limited; this meant that when a photogrammetric model of the entire shipwreck site, or a larger area, was created, the available detail in the 3D model deteriorated due to operator reduction of the number of meshes and resolution of textures, in order for the computer to complete the processing. Therefore, to acquire the best results for accurate archaeological information, a large site had to be separated into smaller areas. In other words, if 3D models of the site were created as separate pieces, the number of meshes and the resolution of the 3D models of the entire site could be higher. Moreover, if those 3D model pieces were created separately under the local coordinate system, these pieces could then be merged automatically in other 3D modelling software which has better rendering power. In 2014, the final composite 3D model of the campaign was created from five different model pieces, with each of those pieces created from photogrammetry performed on a different day. These five model pieces were then exported into Autodesk Maya to compose the separate models into one single model (Fig. 4.9). After the 2014 campaign a CG animation was created, and uploaded to YouTube for dissemination. Nevertheless, it is worth noting that since the August 2015, Photoscan v1.2 added a new function called ‘Build tiled model.’ This new function allows computing power to be concentrated on a small area specified by the size of a ‘bounding box’ for building mesh and texture within. In other words, once dense cloud data of the entire site is created, high resolution models of smaller area can be created within the 3D model of the site.

Composite 3D digital model of the state of the excavation by the end of the 2014 research campaign. This model was composed of five separate photogrammetric models whose base-photos were taken on five different days (K. Yamafune and R. Torres)
4.3.3.3 GIS Analysis
The third noteworthy approach tested during the 2014 field season was the improved application of GIS with photogrammetry, and its integration into the excavation workflow. Today, this has become a common application of photogrammetry in archaeological projects; however, it was still rare in 2014. The GIS software ESRI ArcGIS was used as an interactive map, updated every day using the photogrammetric orthomosaic and information gathered by the excavators. The main dataset imported into the GIS software as a base map was an orthophotomosaic generated by Agisoft PhotoScan/Metashape. Since the 3D photogrammetric models had already been created under the local coordinate system, an orthomosaic generated from georeferenced 3D models already contained georeferenced information. Whenever a new orthomosaic was generated and imported into ESRI ArcGIS, the maps of the shipwreck site were updated. Additionally, information on artefacts recovered from the site was digitally catalogued, and then linked to the GIS database. Moreover, these site plans and other information were printed out on waterproof paper, which archaeologists brought underwater to execute their assigned tasks faster and more efficiently. This served as a georeferenced database for the project, and it helped the entire excavation process by providing up-to-date information throughout the campaign.
4.3.3.4 Points-Based Deviation Analysis
The final experimental method applied during the 2014 campaign was ‘points-based deviation analysis.’ This concept takes advantage of software such as CloudCompare, which can compare two different point cloud data sets, and generate differences between the two different data sets, showing the results/calculations empirically as quantitative data, or graphically as differences in colours. In 2014, this type of analysis was applied to the repetitive photogrammetric recording of the same areas throughout the 2-month campaign. The dense points cloud data of the area, which contained large barrels and smaller casks, were exported into CloudCompare and the deviation analysis was applied (Fig. 4.10). The software displayed ‘excavated areas’ in colour and provided differences in quantitative data (for instances, how much additional surface had been excavated). Based on the results, it is suggested that stratigraphic recording and analysis could be aided by application of ‘deviation analysis‛. Additionally, this application could be used for multi-year site monitoring; in other words, the ‘deviation analysis’ based on photogrammetry could track changes on underwater sites over time, and could be used for site management plans.

Points based deviation analysis in CloudCompare. Differences between two different data set were displayed in colors (K. Yamafune)
4.3.4 Research Campaigns 2015 and 2016
In 2015 and 2016 systematic photogrammetric recording continued in the same manner. During the two campaigns, the excavation went on along the keel, the exposed ballast, and the area south of the big barrels filled with intense-red hematite. Extremities of the preserved keel area were reached, but the excavation continued in both directions, with the scope of identifying the broken posts.
Unfortunately, the location of the control points placed during the 2014 campaign slightly changed for various reasons. This meant that it was not possible to use these control points to add new reference points for newly exposed areas for photogrammetric recording. For this reason, different methods were applied to create the local coordinate system for 3D photogrammetric models of newly exposed shipwreck areas (Fig. 4.11a, b).

(a and b) Composite photogrammetric 3D model of the research campaigns 2015 and 2016, and the respective orthomosaic (K. Yamafune, R. Torres, S. Govorčin, D. Gorički)
In order to apply the new method, capturing photos for photogrammetry covered slightly larger areas than necessary. Once photogrammetric models of each area were created with intentionally wider capturing areas, the photogrammetric models of the same areas from 2014 campaign were opened. Then, in Agisoft PhotoScan/Metashape, markers were created on exact mutual points on all models; since the 2014 models were already georeferenced, or contained the local coordinate system, the 2014 coordinate system could then be applied to the 2015 and 2016 models. Therefore the 2015 and 2016 photogrammetric models were georeferenced based on the coordinate system of the 2014 campaign. However, this method may be less reliable once excavated areas are extended further. In any case, the new coordinate system was essential for photogrammetric recording in following campaigns.
4.3.5 Mapping the Area of Archaeological Interest in 2017
The 2017 field season continued, following the same research and documentation procedures, in the southern and central area of the hull. According to the system, recently elaborated by Yamafune (2017), the photogrammetric mapping of the whole area of archaeological interest was successfully executed during six consecutive dives, covering the area of 60 × 20 m (Fig. 4.12).

Photogrammetric model of the entire Gnalić shipwreck site. The area measures approximately 60 × 20 m. The model includes furthermost stern (rudder pintles?) and bow (grapnel anchor chain?) concretions (K. Yamafune)
This new methodology does not require direct measurements of control points that was applied during 2013 and 2014 campaigns. The scale bars were placed on the mapping area to scale constrain created 3D models and to allow the application of a 3D CAD software, such as 3D Rhinoceros, to create a local coordinate system.
In order to produce this photogrammetric model, the site was divided into two half-areas, 30 × 20 m each, following the requirements of one photo shooting session. Nine scale bars (five 1-m scale bars and four 0.5-m scale bars), and three coded targets, acting as reference points, were positioned in each half-area. After the successful creation of one half-area model, Agisoft Photoscan/Metashape calculated the residual error of 0.0045 m, based on 0.7-m markers/scale bars, created in Agisoft PhotoScan/Metashape software.
Once the initial model was created, however, it was possible to apply the ‘Optimize camera position’ command on Agisoft PhotoScan/Metashape, in order to fix distortions in the created model. As a result, the residual error of the Gnalić model became 0.0003 m (0.3 mm) in 0.7 m (Fig. 4.13). This theoretically indicates that the possible positional error from one end of the site to the other (around 60 m) is approximately 2.7 cm.

After optimizing camera positions in Agisoft PhotoScan/Metashape, the residual error of 0.7-m scale bars is 0.0003 m (0.3 mm)
Once the precision of the model was considered satisfactory, the depth measurements of three reference points were taken using a dive computer. When the photogrammetric model was created, scaled, its camera positions optimized, and re-processed, distances between three control points were calculated within Agisoft PhotoScan/Metashape software. Then, a triangle was created in Rhinoceros 3D CAD software, and its position was adjusted based on depths of three reference points. Finally, Rhinoceros provided x, y, and z coordinates of the adjusted position of these local reference points, which were applied to the photogrammetric models in Agisoft PhotoScan/Metashape (Fig. 4.14).

Screenshot image of creating a local coordinate system for Gnalić Shipwreck site. The yellow triangle was created based on the distances between reference points on the western half-area in Agisoft PhotoScan/Metashape, and a red triangle was created in the same way for the eastern half-area. The green triangle indicates positions of reference points on the western half-area of the site, and a blue triangle indicates reference points on the eastern half-area. Position/rotation of the green and the blue triangles were adjusted by depth measurements
This new methodology has been applied on various underwater archaeological sites, with successful results. It is a great advantage that it does not require much preparatory work to create an accurate local coordinate system for photogrammetric recording, such as DSM. For instance, for recording the Gnalić Shipwreck site in its entirety, one dive to places scale bars and three reference points, and two dives for photography on the western half-area were necessary; followed by one dive to move the scale bars and position the reference points in the eastern half-area, and two more dives to complete the photography. This means that it required just six dives (25 min each), or 150 min of one diver’s time, to cover 60 × 20 m surface, while maintaining accuracy of 2.7 cm residual errors over the whole length of the site (i.e. for 1 m long object possible error is 0.4 mm).
4.4 Timber and Artefact Recording
The process of systematic photogrammetric recording also encompasses recovered artefacts, and elements of the ship’s hull. The main issue in the photogrammetric recording of such relatively small objects is that photographs have to be taken from all the directions, i.e. cover all the surfaces. In other words, if photogrammetry was performed on an artefact in the same manner as it is performed on an archaeological site, then the side on which the artefact rests could not be modelled properly, because it is hidden from the camera.
To solve this problem, in Agisoft PhotoScan/Metashape a process known as ‘masking’ can be used to proceed correctly with the photogrammetric recording. The program has various masking methods, yet during the 2016 Gnalić research campaign the ‘masking from model’ method was exploited. First, two or more 3D models of a single object were created, taking care that each time the object rested on a different side. After scaling the created models by using scale-bars placed around the object, the ground plane (all meshes of the 3D model except meshes of the object itself) was erased. Then ‘masking’ was applied to photos using the ‘masking from model’ method. After ‘masks’ were successfully created on all the original photos, they were gathered under one ‘chunk’, and the regular photogrammetric workflow of Agisoft PhotoScan/Metashape proceeded, exploiting the created ‘masks.’ As a result of the ‘masking’ procedures, photogrammetric 3D digital models of several recovered timbers, the bottom part of the bilge pump and a probable pintle concretion of the ship’s rudder were successfully created.
The purpose of photogrammetric modelling of ship timbers was to create a 3D record of each recovered timber for timber catalogues. According to nautical archaeological methodology, to fully understand ship’s structure it is important to understand and record all the dimensions, position and types of fastenings and scarves, tool marks, and so on. Therefore, recording the elements of the hull in as much detail as possible is an important task (Steffy 1994). Creating timber and artefact catalogues, however, is usually labour intensive and requires significant experience. For this reason, the photogrammetric 3D models were conceived to facilitate and speed up the operation. Once a 3D model of a ship-timber or other object was created, orthomosaics were generated using six different projection planes (top view, bottom view, front view, back view, right view, and left view). Next, these orthomosaics of the six different projection planes were aligned in series in Adobe Photoshop and converted into the artefact drawing (Yamafune 2016).
The main advantage of using photogrammetry to generate the basic timber and artefact drawings is its efficiency in terms of required recording time. Capturing the data to create a 3D model is fast, requiring only the time to photograph the object. After this, the artefact can quickly be returned to suitable conservation conditions, or to site, while post-processing to create the 3D model is carried out. For instance, during the 2016 campaign, the bottom part of the ship’s bilge pump was recovered in order to record its structure in both 3D digital model format and traditional 2D artefact drawing (Fig. 4.15). The pump was found in the starboard side of the ship, surrounded by planks forming a triangular structure, which could be interpreted as the pump well. Notches on the sides on the foot valve had the function of fixing the pump between two frames, while the upper part of the pump was not preserved. After recording the exact position of the bilge pump inside the pump well, it was taken to the conservation laboratory to conduct detailed documentation, using photogrammetry. Traditional manual recording of the artefact by 2D drawing would have certainly required much more time, causing a longer exposure of the waterlogged artefact to drying conditions. In this case of quick photogrammetric recording automatically transferred into a 2D drawing (with accuracy checked through the observations and direct measurements), the bilge pump was rapidly returned to the site to be preserved in situ until conditions for conservation can be assured. In summary, using photogrammetry and the ‘masking’ method, the team successfully acquired necessary archaeological data on wooden structures of the ship with minimum damage.

Artefact drawing of the bottom of the bilge pump structure of Gnalić shipwreck. Orthomosaics of six different projection plans were generated from the 3D photogrammetric model, and then these orthomosaics were aligned and converted into artefact drawings (K. Yamafune, K. Batur)
Another interesting element that was recorded by photogrammetry was a probable pintle concretion, recovered from the area of the stern. The area where it was recovered consisted of concreted objects which might have been pintle and gudgeon, the ship’s elements connecting the rudder to the transom and sternpost. The pintle was attached to the rudder, although the wooden part either disintegrated or remains rest below the sediment. The method applied to record the presumed pintle was the same as for the timbers and bilge pump (Fig. 4.16), the only difference being that Agisoft PhotoScan/Metashape control points were used instead of scale bars. As at present it was not possible to arrange for proper conservation treatment, after recording, the concretion was returned to the site.

Probable pintle concretion, as recorded (K. Batur)
4.5 Virtual Reality Application
After the 2014 excavation season, the application VR GNALIĆ was created in order to exploit the results of the photogrammetric record, by integrating the images into a format suitable for exploration on a computer, or with a VR viewer, for example the HTC VIVE headset. The experiment was conducted by Ervin Šilić and his team from the Novena Digital Multimedia Studio in Zagreb, Croatia.
In the coordinate system of the virtual space of the application, basic orientation points were defined for the integration of all the photogrammetric models in the virtual world. The positioning of newly produced models is designed as an automated process. Opening the application recalls the defined models and presents them in a virtual environment in which it is possible to move them (Fig. 4.17a–c). The virtual environment was created with the Unity multiplatform game engine, and the ASP.NET web framework was used for the Content Management System.

(a–c) Obtaining cross-sections of the recorded timbers along the x, y and z axes (Novena Ltd.)
Besides moving around the site, the interactive component allows the user to open or hide each excavation phase. It is also possible to select the timbers which were fully recorded, and to examine them in detail. On selection, each timber appears in a separate space in the form of a 3D model, which can be examined from all sides, and cut along any of the three axes in order to obtain cross-sections in various positions (Fig. 4.17a–c).
VR GNALIĆ can be exploited for presenting the research results to the wider public in an attractive and exciting way but could also be useful to permit discussion among scientists, who could ‘visit’ the site, and integrate their suggestions or comments, even if they could not be physically present during the excavation campaigns.
Ongoing technological development is rapidly increasing the potential of such exploitation of 3D models of sites and finds, and there is no doubt that it this technology could be widely exploited for the promotion of underwater archaeological projects, and the justification of their importance. They can provide ideal complementary material for temporary exhibitions or museum displays, either in real or virtual form (Fig. 4.18).

Position of the excavated part of the hull within the representation of a sixteenth-century ship (K. Yamafune)
4.6 Automation of the Underwater Recording Process
In the framework of the Breaking the Surface field workshop on underwater robotics and applications (held in Biograd na Moru, Croatia, October 2016), the Autonomous Underwater Vehicle GIRONA 500 was employed to record the state of research of the Gnalić shipwreck site (Gracias et al. 2013). The work was executed by the research team from the Computer Vision and Robotics Research Institute of the University of Girona, under the direction of Pere Ridao (Ridao and Gracias 2017). It was conceived to demonstrate the state-of-the art application of underwater robotics for rapid high-resolution mapping of shipwreck sites.
The AUV was programmed to survey the shipwreck at multiple altitudes, and the data collected was used to build 2D photomosaics and 3D optical reconstructions with 1 × 1 mm pixel resolution, as well as to develop topological panoramic maps, which were made available during the same field workshop (BTS 2016). The team from Girona had previously performed detailed AUV mapping of the La Lune shipwreck (Gracias et al. 2013) and some shipwreck sites along the Catalan coast (e.g. Hurtós et al. 2014). The experimental mapping of the Gnalić shipwreck had the most positive outcome and demonstrated the potential of the automated recording process, considered as complementing rather than replacing the work of the divers. The comparison of the accuracy of the automatically generated photos, and consequently the orthomosaics and 3D models, with the results of the photogrammetric recording executed by the diving team is in progress. This analysis will serve to improve the automated process, which could contribute greatly to recording the advancement of the excavation, and would be essential for documenting deep-water sites.
4.7 Conclusions
Despite all the advantages, after six years of intense underwater photogrammetric recording experience on an extremely demanding shipwreck site, the authors conclude that photogrammetry is not an absolute, sole recording system, that supersedes all others. It certainly helps in quick and precise recording of artefacts and structures, providing data that could be used in various formats and for various purposes. On the other hand, its accuracy of geometry and resolution of texture has limitations. Therefore, detailed data have to be recorded manually in order to fully understand shipwreck sites. Moreover, it does not define the relationships between the recorded elements, as it only records the visible ‘surface’ data.
Photogrammetry is a recording technique, and, as such, it assists the research procedure. This means that researchers must know how to properly excavate and document the site, recover and conserve the archaeological finds etc. An unfortunate recent trend in this discipline is an increasing number of excavation campaigns in which archaeologists focus mostly on the photogrammetric recording, blindly relying on its data. It is a well-known fact that underwater archaeological campaigns require good preparation, organization, excavation, site and artefact conservation, and publication of the results. Photogrammetric recording cannot replace any of these phases, but could help us in their execution.
As long as the archaeologists that work in the underwater environment, however, understand the advantages and limitations of photogrammetric recording, it can be fully integrated into the workflow of research campaigns. Once it functions properly as an integral part of the project, it can greatly help the archaeological research, by generating an accurate record through a relatively cheap and time-saving process, and subsequently provide attractive material for the public promotion of the project, educational purposes and museum display. It can also help in a 3D visualization of the advancement of the excavation, something that is nearly impossible or extremely time-consuming with the traditional recording process. Photogrammetry is still often called ‘innovative.’ In fact, photogrammetry is now a common, indispensable tool in the process of recording the underwater archaeological sites and finds. Although technological upgrades continue to improve the hardware, software and accuracy of photogrammetric recording, the true innovation lies in avoiding overreliance on photogrammetry, but instead striving to understand its drawbacks and limitations. Simply performing photogrammetry as the end goal of an underwater excavation is not sufficient. Innovations, such as the Gnalić shipwreck photogrammetry discussed in this article continue to adapt and refine the processes for recording underwater archaeological sites and their excavations, while examining and understanding the capabilities and shortcomings of these digital methods.
Notes
- 1.
Although Gasparetto examined just the notarial archive of Catti out of over 50–60 notaries active in Venice at the time (personal information M. Bondioli), he managed to trace important information. Gasparetto based his choice on the work of Tenenti (1959).
- 2.
The support was provided by the Ministry of Culture of the Republic of Croatia, through the engagement of Josip Belamarić and Zlatko Uzelac. The Center for Maritime Archaeology and Conservation (CMAC) of Texas A&M University and the City of Biograd na Moru have also supported the project.
- 3.
Since 2012 Mariangela Nicolardi and Mauro Bondioli have conducted systematic research in the State Archive of Venice, which started from Gasparetto’s presumption, and has confirmed the identification of the ship multiple times (Radić Rossi et al. 2013: 75–88).
- 4.
On the other hand, Beltrame (2006: 93) concluded that the ship was preserved below the waterline, which turned out to be incorrect.
- 5.
The survey was executed by the Department of Geology of the University of Patras, Greece, under the direction of George Papatheodorou.
- 6.
The photogrammetry of the Pakoštane shipwreck was carried out by Vincent Dumas and Philipe Grosscaux.
- 7.
The comprehensive duration of the campaign was 30 days, but it encompassed the assessment of the old finds and documentation in the Local Heritage Museum in Biograd na Moru. The operation was co-directed by the Department of Archaeology of the University of Zadar, represented by Irena Radić Rossi, and the Nautical Archaeology Program of Texas A&M University, represented by Filipe Castro.
- 8.
These overlapping percentages for the images are recommended in Section 2 of the Shooting Process Planning suggested in the website of Agisoft (2018).
References
Agisoft PhotoScan (2018) http://www.agisoft.com/pdf/tips_and_tricks/Image%20Capture%20Tips%20-%20Equipment%20and%20Shooting%20Scenarios.pdf. Accessed 8 Aug 2018
Atkinson K, Duncan A, Green J (1988) The application of a least squares adjustment program to underwater archaeology survey. Int J Naut Archaeol 17(2):119–131. https://doi.org/10.1111/j.1095-9270.1988.tb00631.x
Beltrame C (2006) Osservazioni preliminari sullo scafo e l’equipaggiamento della nave di Gnalić. In: Guštin M, Gelichi S, Spindler K (eds) The heritage of Serenissima: the presentation of the architectural and archaeological remains of the Venetian Republic, Proceedings of the international conference Izola, Venezia, 4–9 November 2005, pp 93–95. Annales Mediterranea, Koper
Bowens A (ed) (2008) Underwater archaeology: the NAS guide to principles and practice. Wiley-Blackwell, Portsmouth
Božulić G (2013) Zbirka “Teret potopljenog broda iz 16. stoljeća” Zavičajnog muzeja Biograd na Moru/The “cargo of a 16th century sunken ship” collection of the Biograd na Moru Heritage Museum. In: Filep A, Jurdana E, Pandžić A (eds) Gnalić; Blago potonulog broda iz 16. stoljeća/Gnalić—Treasure of a 16th century sunken ship, exhibition catalogue. Croatian History Museum, Zagreb, pp 37–49
Brusić Z (2006) Tre naufragi del XVII o XVIII secolo lungo la costa adriatica orientale. In: Guštin M, Gelichi S, Spindler K (eds) The heritage of Serenissima: the presentation of the architectural and archaeological remains of the Venetian Republic, Proceedings of the international conference Izola, Venezia, 4–9 November 2005, pp 77–83. Annales Mediterranea, Koper
BTS (2016) Breaking the Surface 2016, Girona 500 Tutorial (Data Analysis). http://bts.fer.hr/. Accessed 15 Aug 2018
Casabán J, Radić Rossi I, Yamafune K, Castro F (2014) Underwater photogrammetry applications: the Gnalić shipwreck, 2013 (Croatia). In: Abstracts of the IKUWA V conference, Cartagena, Spain, 14–18 October 2014
Dumas V (2012) La photogrammétrie numérique appliquée à l’architecture navale: le cas de l’èpave de Pakoštane (Annexe). In: Boetto G, Radić Rossi I, Marlier S, Brusić Z (eds) L’épave de Pakoštane, Croatie (fin IVe–début Ve siècle apr. j.-c.). Archaeonautica 17:105–151 (Annexe:143–145)
Gasparetto A (1973) The Gnalić wreck: identification of the ship. J Glass Stud 15:79–84
Gracias N, Ridao P, Garcia R, Escartíny J, L’ Hour M, Cibecchini F, Campos R, Carreras M, Ribas D, Palomeras N, Magi L, Palomer A, Nicosevici T, Prados R, Hegedüsz R, Neumann L, De Filippox F, Mallios A (2013) Mapping the moon: using a lightweight AUV to survey the site of the 17th century ship ‘La Lune’. OCEANS, Bergen, Norway, 10–14 June 2013, MTS/IEEE. https://doi.org/10.1109/OCEANS-Bergen.2013.6608142
Green J, Matthews S, Turanli T (2002) Underwater archaeological surveying using PhotoModeler, VirtualMapper: different applications for different problems. Int J Naut Archaeol 31(2):283–292. https://doi.org/10.1006/ijna.2002.1041
Holt P (2010) Site Recorder 4 exercise book. Version 1.5, June 2011. 3H Consulting Ltd. http://www.3hconsulting.com/Downloads/SiteRecorder4ExerciseBook.pdf. Accessed 19 May 2017
Hurtós N, Nagappa S, Palomeras N, Salvi J (2014) Real-time mosaicing with two-dimensional forward-looking sonar. In: 2014 IEEE international conference on Robotics and Automation (ICRA), Hong Kong, pp 601–606. https://doi.org/10.1109/ICRA.2014.6906916
Lane F (1934) Venetian ships and shipbuilders of the Renaissance. The John Hopkins Press, Baltimore
Lazar I, Willmott H (2006) The glass from the Gnalić wreck. Annales Mediterranea, Koper
Mileusnić Z (ed) (2004) The Venetian shipwreck at Gnalić. Annales Mediterranea, Koper
NOAA (2018) Magnetic field calculators. https://www.ngdc.noaa.gov/geomag-web/#declination. Accessed 14 Aug 2018
Petricioli S (1981) Deset godina rada na hidroarheološkom nalazu kod Gnalića. Godišnjak zaštite spomenika culture. Hrvatske 6(7):37–45
Petricioli S, Uranija V (eds) (1970) Brod kod Gnalića - naše najbogatije hidroarheološko nalazište, Vrulje—Glasilo Narodnog muzeja u Zadru 1
Polzer M (2004) An Archaic laced hull in the Aegean: the 2003 excavation and study of Pabuç Burnu ship remains. INA Quaterly 31(3):3–11
Polzer M, Casaban J (2012) Photogrammetry: a legacy of innovation reaching back to Yassıada. INA Quarterly 39(1/2):13–17
Radić Rossi I, Bondioli M, Nicolardi M, Brusić Z, Čoralić L, Vieira de Castro F (2013) Brodolom kod Gnalića—Ogledalo renesansne Europe/the shipwreck of Gnalić—mirror of Renaissance Europe. In: Filep A, Jurdana E, Pandžić A (eds) Gnalić: Blago potonulog broda iz 16. stoljeća/Gnalić—treasure of a 16th century sunken ship, exhibition catalogue. Croatian History Museum, Zagreb, pp 65–95
Radić Rossi I, Nicolardi M, Batur K (2016) The Gnalić shipwreck: microcosm of the Late Renaissance world. In: Davison D, Gaffney V, Miracle P, Sofaer J (eds) Croatia at the Crossroads: a consideration of archaeological and historical connectivity. Archaeopress Archaeology, Oxford, pp 23–248
Ridao P, Gracias N (2017) The methodology and the results of the AUV (Girona 500 survey of the present state of the Gnalić shipwreck site. In: Abstracts In Poseidon’s realm XXII: international conference on underwater archaeology (We’re all in the same boat—the social importance of ships, rafts and ferries), Koblenz, 17–19 March 2017
Rule N (1989) The Direct Survey Method (DSM) of underwater survey, and its application underwater. Int J Naut Archaeol 18(2):157–162. https://doi.org/10.1111/j.1095-9270.1989.tb00187.x
Steffy JR (1994) Wooden ship building and the interpretation of shipwrecks. Texas A&M University Press, College Station
Tenenti A (1959) Naufrages, corsaires et assurances maritimes à Venise, 1592–1609. SEVPEN, Paris
Tucci U (1967) Un problema di metrologia navale: la botte veneziana. Studi veneziani IX:201–246
Yamafune K (2016) Using computer vision photogrammetry (Agisoft Photoscan) to record and analyze underwater shipwreck sites. PhD dissertation, Texas A&M University
Yamafune K (2017) A methodology for accurate and quick photogrammetric recording of underwater cultural heritage. In: Proceedings of the 3rd Asia-Pacific Regional conference on Underwater Cultural Heritage, Hong Kong, 1, pp 517–537
Yamafune K, Torres R, Castro F (2016) Multi-Image photogrammetry to record and reconstruct underwater shipwreck sites. J Archaeol Method Theory 24(3):703–725. https://doi.org/10.1007/s10816-016-9283-1
Acknowledgements
We express our gratitude to the Ministry of Culture of the Republic of Croatia, the Croatian Science Foundation (Archaeology of Adriatic Shipbuilding and Seafaring Project [AdriaS], IP-09-2014-8211), the City of Biograd na Moru, the Municipality of Tkon, the Nautical Archaeology Program of Texas A&M University, the Institute of Nautical Archaeology, the Institute for Maritime Heritage ARS NAUTICA, and the Local Heritage Museum of Biograd na Moru for their financial and logistical support of the Gnalić shipwreck excavation. Special thanks to the Association for Promotion of Underwater Archaeology (FUWA) from Koblenz, Germany, which invested a lot of money and human power into supporting the excavation since 2013, thus significantly extending the excavation seasons. We are also grateful to Filipe Castro from the Ship Reconstruction Laboratory of Texas A&M University for having supported the project in the period from 2012 to 2014, including the work on the photogrammetric recording of the site; to Dave Ruff, PhD candidate from the same institution, whose help in editing the English text was a precious contribution to the finalization of this and many other articles, and to Pierre Drap and his small CNRS team, which executed the first photogrammetric recording of the Gnalić shipwreck remains. Credit for the outcome of the systematic photogrammetric recording is shared by Sebastian Govorčin, Javier Rodrigez Pandozi, Dražen Gorički, Mirko Belošević, and Danijel and Ranko Frka. The outstanding quality of the photographic coverage of the Gnalić site is a direct result of the quality of the team members who performed the photographic coverage of the researched areas, providing the basis for producing the 3D models. Regarding the underwater photogrammetry, we would like to point out the great contribution of Pere Ridao and the team of the Computer Vision and Robotics Research Institute of the University of Girona, in the hopes that the fruitful initial experiment with AUV-based photogrammetric recording of the Gnalić shipwreck executed in 2016 will continue to develop in the future. We are also grateful for the support of Ervin Šilić and his team from the Novena Digital Media Studio, and look forward to continued collaboration. We would especially like to thank Mariangela Nicolardi and Mauro Bondioli for their most patient and long-lasting examination of the documents in the State Archive of Venice regarding the ship’s context, its personal story and the hull structure, as well as all the other participants in the fieldwork and post-excavation research, whose list includes several hundreds of names from all over the world. Finally, we express our gratitude to the anonymous referees for their comments, corrections and suggestions, that improved the content of the article, and to Miranda Richardson for excellent feedback regarding structural and stylistic aspects of the text.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2019 The Author(s)
About this chapter

Cite this chapter
Radić Rossi, I., Casabán, J., Yamafune, K., Torres, R., Batur, K. (2019). Systematic Photogrammetric Recording of the Gnalić Shipwreck Hull Remains and Artefacts. In: McCarthy, J., Benjamin, J., Winton, T., van Duivenvoorde, W. (eds) 3D Recording and Interpretation for Maritime Archaeology. Coastal Research Library, vol 31. Springer, Cham. https://doi.org/10.1007/978-3-030-03635-5_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-03635-5_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-03634-8
Online ISBN: 978-3-030-03635-5
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)