
Abstract
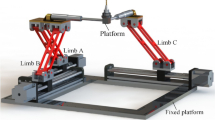
The motion character of a special three degree-of-freedom (DOF) parallel mechanism is analyzed by screw theory. This mechanism’s significant feature is that the axis of its prismatic pair is parallel to that of its revolute pair in the same limb. Firstly, by analysis, the mechanism’s constraint screws are obtained, which leads to motions along the fixed-length links being restricted. Secondly, we get the mechanism’s constraint screws’ reciprocal productions, namely the mechanism’s free motions, which are three screw motions. After that, a numerical example is presented to illustrate the analysis in detail. At last, we draw some conclusions and discuss the future work.
Supported by Institutions Youth Science and Technology Research Fund of Education Department of Hebei Province(2010217)
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
Wahl J (2000) Articulated tool head:Canada, CA 2349579 11 May 2000
Saenz Fernandez AJ, Collado Jimenez V, Gimenez Olazabal M (2002) Kinematical system for a movable platform of a machine:European, EP1245349 (A1), 10 Jan 2002
Lee KM, Shah DK (1988) Kinematic analysis of a three-degree-of-freedom in-parallel actuated manipulator. IEEE T Robotic Autom 4(3):354–360
Bürüncük K, Tokad Y (1999) On the kinematic of a 3-DOF stewart platform. J Robotic Syst 16(9):105–118
Carretero JA, Nahon MA, Podhorodeski RP (2000) Workspace analysis and optimization of a novel 3-DOF parallel manipulator. IEEE T Robotic Autom 15(4):178–188
Fan KC,Wang H,Zhao JW et a1 (2003) Sensitivity analysis of the 3-PRS parallel kinematic spindle platform of a serial-parallel machine tool. Int J Mach Tool Manu ,43:1561–1569
Pond GT,Carretero JA (2004) Kinematic analysis and workspace determination of the inclined PRS parallel manipulator. In: 15th CISM-IFToMM Symposium on Robot Design,Dynamics,and Control, Springer Quebec, pp 4–18
Liu X J,Pruschek P,Prjtschow G (2004) A new 3-dof parallel mechanism with full symmetrical structure and parasitic motions. In: International Conference on Intelligent Manipulation and Grasping, Grafica K s.n.c., Genoa, pp 389–394
Liu XJ, WU C, Wang JS, Bonev I (2008) Attitude description method of [PP]S type parallel robotic mechanisms. Chin J Mech Eng (Chinese Version) 44(10):19–23
Zhao JS, Feng ZJ, Chu FL (2009) Analytical theory of degrees of freedom for robot mechanisms. SciencePress, Beijing
Zhao TS (2000) Some theoretical issues on analysis and synthesis for spatial imperfect-dof parallel robot. Yan Shan University, Qinhuangdao
Yu JJ, Liu XJ, Ding XL, Dai JS (2008) Mathematical foundations of robot mechanism. China Machine Press, Beijing
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag London
About this paper
Cite this paper
Gao, Z., Su, R., Zhao, J., Wang, H. (2012). Analysis on Motion Characters for A 3-PRS Parallel Mechanism. In: Dai, J., Zoppi, M., Kong, X. (eds) Advances in Reconfigurable Mechanisms and Robots I. Springer, London. https://doi.org/10.1007/978-1-4471-4141-9_34
Download citation
DOI: https://doi.org/10.1007/978-1-4471-4141-9_34
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-4471-4140-2
Online ISBN: 978-1-4471-4141-9
eBook Packages: EngineeringEngineering (R0)