
Abstract
In this study, we introduce a noble neurogenetic approach to the design of fuzzy controller. The design procedure dwells on the use of Computational Intelligence (CI), namely genetic algorithms and neurofuzzy networks (NFN). The crux of the design methodology is based on the selection and determination of optimal values of the scaling factors of the fuzzy controllers, which are essential to the entire optimization process. First, the tuning of the scaling factors of the fuzzy controller is carried out, and then the development of a nonlinear mapping for the scaling factors is realized by using GA based NFN. The developed approach is applied to a nonlinear system such as an inverted pendulum where we show the results of comprehensive numerical studies and carry out a detailed comparative analysis.
Chapter PDF
Similar content being viewed by others


Keywords
- Fuzzy Controller
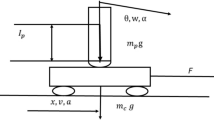
- Inverted Pendulum
- Detailed Comparative Analysis
- Optimize Control Parameter
- Inverted Pendulum System
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Oh, S.K., Pedrycz, W.: The Design of Hybrid Fuzzy Controllers Based on Genetic Algorithms and Estimation Techniques. Kybernetes 31, 909–917 (2002)
Oh, S.K., Ahn, T., Hwang, H., Park, J., Woo, K.: Design of a Hybrid Fuzzy Controller with the Optimal Auto-tuning Method. Journal of Control, Automation and Systems Engineering 1, 63–70 (1995)
Li, H.X.: A comparative design and tuning for conventional fuzzy control. IEEE Trans. Syst., Man, Cybern. B. 27, 884–889 (1997)
Goldberg, D.E.: Genetic algorithms in Search, Optimization, and Machine Learning. Addison-Wesley, Reading (1989)
Yamakawa, T.: A New Effective Learning Algorithm for a Neo Fuzzy Neuron Model. In: 5th IFSA World Conference, pp. 1017–1020 (1993)
Park, B.J., Oh, S.K., Pedrycz, W.: The Hybrid Multi-layer Inference Architecture and Algorithm of FPNN Based on FNN and PNN. In: 9th IFSA World Congress, pp. 1361–1366 (2001)
Jang, J.R.: Self-Learning Fuzzy Controllers Based on Temporal Back Propagation. IEEE Trans. On Neural Networks 3, 714–723 (1992)
Oh, S.K., Rho, S.B., Kim, H.K.: Fuzzy Controller Design by Means of Genetic Optimization and NFN-Based Estimation Technique. International Journal of Control, Automations, and Systems 2, 362–373 (2004)
Park, H.S., Oh, S.K.: Fuzzy Relation-based Fuzzy Neural-Networks Using a Hybrid Identification Algorithm. International Journal of Control, Automations, and Systems 1, 289–300 (2003)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2005 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Oh, S., Roh, S., Ahn, T. (2005). Parameter Estimation of Fuzzy Controller Using Genetic Optimization and Neurofuzzy Networks. In: Wang, J., Liao, XF., Yi, Z. (eds) Advances in Neural Networks – ISNN 2005. ISNN 2005. Lecture Notes in Computer Science, vol 3498. Springer, Berlin, Heidelberg. https://doi.org/10.1007/11427469_16
Download citation
DOI: https://doi.org/10.1007/11427469_16
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-25914-5
Online ISBN: 978-3-540-32069-2
eBook Packages: Computer ScienceComputer Science (R0)