
Abstract
All aggregate biological phenomena in the aerosphere are due to the behaviors of unique individuals acting according to their own rules of behavior and perceived external stimuli. An appealing characteristic of aeroecology is that we can observe both these aggregate behaviors of large groups (using tools such as radar and observational networks) as well as the behavior of individual animals (by employing animal tracking technology). Traditional population modeling efforts focus on equations that mimic natural populations in terms of overall population size and/or mean population parameters, often discounting mechanisms operating on the individual level that give rise to overall population dynamics. Concurrent advancements in computing capacity and animal tracking methodologies provide us with the opportunity to examine how the actions of individuals scale up to give rise to population-level phenomena in the aerosphere. More specifically, we can now model populations as a collection of individuals that behave independently, and we can validate the inferences from these agent-based models by tracking actual animals over the course of their annual cycle. In this chapter, we provide an example of how an agent-based model can be used to predict migration behavior across a species range based on a small set of actual migration tracks. The example provides a generalizable framework for using agent-based models as a link between data from individuals and broad-scale phenomena.
Similar content being viewed by others


1 Introduction: Agent-Based Modeling in Aeroecology
An appealing characteristic of aeroecology is that current methodologies allow us to observe aggregate behaviors of large groups of animals as well as individual behaviors. Tools such as weather radar and observational networks like eBird allow us to make large-scale quantifications of animal populations that use the aerosphere (see Chaps. 4, 12, 13 and 16), whereas tracking devices like satellite transmitters and geolocators let us determine the locations and behaviors of individual animals (see Chap. 9). However, when we try to apply these data sources to address fundamental questions about what governs individual or aggregate behaviors, we often find that the specificity of the broad-scale data is lacking and that the generalizability of individual-based tracking data is limited. This dilemma is analogous to the more general problem of understanding animal behavior and population biology from top-down and bottom-up approaches. We can represent the gross dynamics of a population as a simple mathematical formulation (e.g., a Lotka–Volterra equation; Yorke and Anderson 1973), but this approach fails to offer detailed explanations for the observed population dynamics, especially when applied to systems with dynamically interacting heterogeneous components (Kaul and Ventikos 2015). Yet, a focus on the behavior of a few individual animals or even many animals within a single population may be biased toward the peculiarities of the studied population. Moreover, expanding a study to include a large number of individuals and populations is often economically or logistically impossible.
In this chapter, we argue that agent-based models (ABMs) can serve as a unifying link between knowledge about individuals and observations of broad, population-level phenomena. The theoretical basis for ABMs assumes that all aggregate biological phenomena are due to the behaviors of unique individuals acting according to their own rules of behavior and perceived external stimuli (Marceau 2008). If we can generate a realistic simulation of how individuals interact with their environment and each other, then we can simulate entire populations of individuals that demonstrate the same population-level characteristics of actual populations. Basic concepts of population growth and demography can still be applied, but there is the added benefit of knowing how individual-level behaviors relate to the overall population dynamics. Moreover, we can experimentally change these individual parameters and observe the aggregate outcome. This key capacity in agent-based modeling provides insight into the evolutionary forces that shape both individual and, consequently, aggregate behavior. Even further insight is possible given that we can follow the histories of individual agents to see how their particular decisions led to particular fates. For example, Kanarek et al. (2008) sought to explain the use of traditional foraging grounds by Barnacle Geese (Branta leucopsis) by generating agents (geese) that could choose unoccupied sites according to social rank, memories from past seasons, past reproductive success, and an inherited genetic propensity for site faithfulness. They found that year-to-year site fidelity is highly dependent upon the principle that increased familiarity with a site leads to increased food intake. Hence, site fidelity is largely due to memory and prior experience, which suggests that geese may not adapt readily to rapid redistributions of resources.
ABMs generally seek at least one of two forms of insight. The first is large-scale emergent behaviors or phenomena not explicitly described by the behavior of the components of the system that may be nonintuitive, context dependent, or otherwise too complex to predict with knowledge only of how individual agents behave. Discovery of emergent behaviors was a goal of what is arguably the first agent-based model, that of Botkin et al. (1972). This model, called JABOWA, used known measures of growth as well as shade sensitivity, water availability, and temperature effects to simulate forest dynamics and succession within a mixed-species, mixed-age expanse of trees. The model was successful in achieving realistic simulations of interactions among trees of different sizes and different species, and the study helped to explain the maintenance of species diversity in old-age forests.
A second general goal of ABMs is to determine a simple suite of individual behavioral traits that can give rise to a known aggregate behavior. An example that sought this goal was a model by Parrish et al. (2002), which synthesized several mathematical models to generate a simple set of individual behavioral traits that gave rise to stereotypical schooling behavior in collections of computer-generated fish. Their ABM was capable of generating schooling behavior among individuals whose movement decisions amounted to a sum of locomotory, social, and random forces acting on each individual, with no inherent drive to match each others’ behavior. They found that social forces (attraction to conspecific groups) were the driving force of school formation, but physiological and physical forces (i.e., drag and/or swimming speed) determined the type of schooling behavior (e.g., polarized swimming) that emerged. The now famous “Boids” program was an even simpler means of simulating a natural phenomenon. In this model, Reynolds (1987) was able to generate realistic flocking behavior among virtual birds that “flew” amidst each other as well as various objects. The agents’ paths were determined by only three simple rules: (1) maintain a minimum distance from any object/bird, (2) match the speed of nearby birds, and (3) move toward the center of the flock. Although this model is a simplification of the behavioral rules that govern real flight behavior, the emergent behavior of a group of “boids” closely resembles the flight behavior of real flocks.
At present, ABMs are used for everything from economics to oncology (Tesfatsion 2002; Wang et al. 2015), and they have progressed toward ever greater levels of realism. The earliest ABMs were often confined to a theoretical landscape. However, increased availability of geographic information has given rise to a generation of agent-based models that uses representations of a real-world landscape as an arena for agents to interact with their environment and each other. Extending this paradigm further are ABMs that predict evolutionary responses to environmental change by altering the current digital representations of landscapes to match predictions of future changes (Coss-Custard and Stillman 2008). The ecological scope of ABMs is also expanding. Of particular interest is a recent methodological convergence by ecologists and epidemiologists in the use of ABMs to investigate the role of individual behavior and social networks in disease spread (see Chap. 17). Despite these advances over the last 40 years, ABMs are not a mainstream form of analysis. At present, ABMs are biased toward addressing pragmatic problems (e.g., management of threatened populations), but they also are increasingly used as a tool for addressing more general questions (DeAngelis and Grimm 2014).
We argue that in fields like aeroecology, where the gap between our understanding of the individual and that of broad-scale phenomena (e.g., transcontinental migration) is particularly wide, ABMs offer a much-needed link between individuals and populations. Although they cannot be applied to every situation, ABMs work well when individuals respond strongly to a minimal set of environmental cues or spatiotemporal features in the landscape. An excellent example is a simulation by Erni et al. (2003) that explores the possible migration strategies used by inexperienced (first year) Garden Warblers to navigate from their natal locations in Scandinavia to potential wintering sites in West Africa. The modeling effort compared a variety of instinctive orientation strategies (i.e., flying in a fixed direction) and incorporation of simple movement decisions wherein birds followed coastlines that led toward the wintering grounds. They found that survival, as estimated from the availability of refueling habitat along a route, was enhanced when birds followed coastlines (thus avoiding long-distance water crossings), even though these routes were not as efficient as those that relied upon fixed flight headings. Another example comes from Dennhardt et al. (2015), who present an agent-based model of Golden Eagle (Aquila chrysaetos) movements in the Northeastern USA that is founded on the premise that these birds respond strongly to updrafts as they soar southward during their fall migration. Dennhardt et al. used a real-world physical model of updrafts to predict the migratory movements of eagles with regard to both space and time, and their model results corresponded closely with historical raptor monitoring data as well as monitoring in new sites selected as a result of the modeling output. The following chapter section offers a similar but more generalized approach to using ABMs to predict migration behavior.
2 Extending an Existing Model to Predict Bird Migration Routes
2.1 Background
As a more general example of agent-based modeling, we present an extension of a previous optimization exercise that attempted to determine if a molt-migrant songbird, the Painted Bunting (Passerina ciris), migrated in a manner that optimized its exposure to primary productivity. Molt migrants are so called because they molt their flight feathers during fall migration as opposed to immediately before or after, often pausing at traditional molting sites each year en route between breeding and wintering areas. Among North American songbirds, many molt migrants fly to the North American Monsoon Region in Northwestern Mexico to molt their feathers before moving farther south to their wintering grounds. Some birds, including many Painted Buntings, follow a markedly indirect path between their breeding and wintering grounds to molt their feathers in the monsoon region (Contina et al. 2013; Jahn et al. 2013), and this behavior has been attributed to the flush of primary productivity that is typical of this region in early fall (Leu and Thompson 2002; Rohwer et al. 2005). Bridge et al. (2016) created an agent-based model wherein virtual birds, with movement capabilities similar to real birds, were allowed to move upon a dynamic map of real-world primary productivity in North America that represented the amount of new plant growth (based on a 28-day differential of EVI) within each grid point (pixel) for every day of the fall migration period. Through comparisons among millions of simulations generated by several different search algorithms, this modeling effort yielded sets of migration paths that optimized exposure to primary productivity during the fall molt migration. These optimal paths agreed strongly with the actual migration tracks of real Painted Buntings from southwestern Oklahoma (Fig. 11.1; Contina et al. 2013), which suggests that real Painted Bunting migration paths can be predicted by finding movement paths that maximize exposure to primary productivity as the breeding season ends.

Migration tracks of 12 real Painted Buntings (blue) and the best ten tracks (red) from the “random-optimized” simulation method in Bridge et al. (2016). Tracks are shown on a background map of the scaled EVI values that served as the basis for selection of the best simulated migration tracks
We used this observation as the basis for predicting the migration paths of Painted Buntings from locations throughout their breeding range. Interestingly, Painted Buntings have a split geographic distribution among breeding populations. A large western population in the South-Central USA is separated from a smaller breeding population near the Atlantic Coast by a ~500 km east-west expanse of coastal plain that lacks Painted Buntings (Fig. 11.1). The eastern population does not consist of molt migrants. Rather, these birds molt on the breeding grounds in a manner typical of other eastern songbirds. Hence, our modeling effort not only addresses migration routes but also general molt-migration strategies.
2.2 Model Description
For full details about the ABM used here, refer to Bridge et al. (2016). Briefly, the model prescribes realistic movements to individual agents by having the agents draw from distributions of movement distances based on the movements of real birds. For each day, agents were first assigned to a migratory or nonmigratory state for a particular day with a probability of 0.93 for the nonmigratory state. Birds that entered the nonmigratory state either drew from a distribution of short, local movement distances or did not move at all. Agents in the migratory state traveled at a random heading for a given distance that was drawn from a gamma distribution of distances reflecting the capabilities of real birds making migratory flights (see Contina et al. 2013). For the next 5 days after entering the migratory state, there was a probability of 0.2 that long-distance movement would continue, and if that happened, the heading would be maintained within 20° of the original heading. Except for the constrained headings associated with the migratory state, travel direction was a randomly chosen heading from 0 to 359°.
Millions of movement paths were generated with this process with the intent of exploring a wide range of possible migration routes. Optimization, or identification of the “best” paths, was performed by ranking the paths according to how well they would have exposed birds to high levels of primary productivity. To generate primary productivity scores, the locations for each path were mapped upon a dynamic, real-world grid of values derived from the enhanced vegetation index (EVI) and the 28-day change in EVI (dEVI). We incorporated both of these data layers into the grid, but with rescaling to emphasize the importance of new plant growth expressed in dEVI. The resulting scaled EVI map data was updated every day during the fall migration period, which we designated as July 17 (day of year 198) to December 22 (day 356). As birds moved through this virtual landscape, they acquired a scaled EVI score for each day. Total scaled EVI scores for the entire migration provided a means of ranking migration paths.
Bridge et al. (2016) used several variants on the agent specifications described above as well as different optimization methods for finding optimal migration routes within the constraints of the model. For the sake of simplicity, here we only use what was arguably the best method in terms of processing speed and the resulting scaled EVI totals among the highest ranking routes. This method, referred to as the Constrained Random Optimized method, allowed birds to move randomly as described above, except that at the end of each time step, the virtual bird could search locally (within ±30 km along each of the x and y axes) for the map pixel with the highest scaled EVI score and then go to that pixel location and add its scaled EVI score to the list of daily values. In addition, we added constraints on the initiation of migration to reflect the distribution of departure dates in real birds, and we incorporated a stationary period of at least 30 days to simulate the molting period. For each of five selected origin locations, we simulated one million agents using the Constrained Random Optimized method. Optimal routes were designated as the top 100 routes ranked according to the total scaled EVI score from throughout the migration period.
We chose origin locations that represented the extent of the breeding range for Painted Buntings (Fig. 11.1). The choice of these particular locations was arbitrary although they correspond with current and potential study sites for our research group. Within the western population we chose four sites. The western most of these is Big Bend Texas (29.25°N, 103.29°W). Also among these sites is our original study site at the Wichita Mountains Wildlife Refuge in Southwestern Oklahoma (34.8°N, 98.8°W), for which we have tracking data from real birds. We also include sites in northeastern Arkansas (35.46°N, 94.15°W) and in southern Mississippi near its border with Louisiana (31.42, 91.46) which we know host robust populations of Painted Buntings. Within the eastern portion of the breeding range, we specified migration origins in coastal North Carolina (33.85°N, 78.0°W) and at an inland site in South Carolina (33.1°N, 80.9°W).
Upon examining the results from these simulations, we noted that it was common for birds from the east coast to move across the continent to northwestern Mexico (Fig. 11.2). Given that these migration routes are highly unlikely based on what we know about the species, we carried out a series of post hoc simulations in which we imposed a distance penalty in which presumed energetic gains relative to scaled EVI scores were reduced in proportion to the distances the agents moved. Hence, long transcontinental movements were less likely to result in net benefit, despite the resulting possibility of exposure to higher and rapidly increasing EVI scores. The penalty was assessed at every time step with one unit of scaled EVI subtracted for every 10 km traveled. This distance penalty could also be regarded as an energy penalty that affects the number of refueling days required in association with a long-distance movement. For example, the number of “refueling” days needed to offset a 500 km migration was, for example: 0.8 days at a theoretical maximum site (EVI = 1.0, dEVI = 1.0, scaled EVI = 125.0), 3.2 days at an average site (EVI = 0.5, dEVI = 0.5, scaled EVI = 15.625), or 25.6 days at a poor site (EVI = 0.25, dEVI = 0.25; scaled EVI = 1.95). To make a slightly more thorough search of the landscape, this second simulation was run with 20 million agents for each site of origin. Otherwise, all settings were identical to the previous simulation.

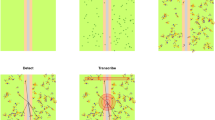
Maps for each of the origin sites used for agent-based simulations without a flight-distance penalty. The 10 tracks with the highest total scaled EVI scores are shown with the highest scoring track of each set of 10 indicated by a red line. Black circles indicate molting sites for the simulated birds. The tracks are presented atop a series of background maps that illustrate how daily scaled EVI values vary in both space and time during the migration period
2.3 Results
As in Bridge et al. (2016), the model results emphasize the importance of the North American Monsoon region as a stopover site for molting birds (Fig. 11.2). Even some of the best virtual-bird tracks from the eastern population made the cross-continental journey to the monsoon region. We regard these routes as highly unlikely if not impossible due to the distances traveled, genetic signatures of Painted Buntings in the monsoon region (Contina, unpublished data), and the fact that the eastern birds molt on the breeding grounds before migrating (Thompson 1991). The conventional view of Painted Bunting migration is that birds in the eastern populations move south to winter in the tip of Florida, the Caribbean islands, and perhaps the Yucatan Peninsula (Lowther et al. 1999; Sykes et al. 2007). It is also apparent that the simulated birds are drawn to the Mississippi River valley, where high and perhaps increasing levels of primary productivity are maintained in the fall, which is largely due to agriculture (Hicke et al. 2004). We note that real Painted Buntings do not make use of this region as a migratory stopover location, which suggests a degree of oversimplification in our model. Clearly, current levels of primary productivity alone do not dictate migration routes, and it is likely that the migration routes of real Painted Buntings evolved prior to agricultural enhancement of primary productivity in the Mississippi River Valley.
Among the simulations originating from Oklahoma and Texas, which had the highest total accumulation of scaled EVI scores, all of the birds molted their feathers in the monsoon region. In contrast, there was a mix of strategies among the best simulations originating from Arkansas and Mississippi. This difference suggests that molting at or near the breeding grounds becomes a viable option as one moves east across the breeding range. This scenario is corroborated by museum specimens from the coastal plains region that were in molt when collected during the post-breeding period (see Thompson 1991). Also, eBird checklists from late fall and early winter corroborate the suggestion that many Painted Buntings molt near the north coast of the Gulf of Mexico (eBird 2012).
Our initial simulations (i.e., those without the distance penalty) of birds originating from North Carolina and South Carolina resulted in many high-ranking tracks where birds flew across North America to the monsoon region in Northwestern Mexico (Fig. 11.2). The behavior of these agents points to a potential weakness in the model, which is that birds can potentially fly great distances without constraints related to energetic costs. To address this problem, we carried out a post hoc set of simulations that entailed a distance penalty (described above) wherein extremely long flights would detract from total scaled EVI accumulations. These simulations yielded tracks that were more in line with expected migratory behavior than the simulations with no distance penalty. In particular, birds from the eastern populations did not fly to the monsoon region with the distance penalty in effect. Instead, these birds moved almost directly southward to areas within the known wintering range of Painted Buntings (Fig. 11.3). Interestingly, all these simulated birds reached wintering sites in Mexico and Central America. A large contingent of Painted Buntings are known to winter in Southern Florida and the Caribbean, but this strategy is not represented among the highest scoring simulations. Moreover, it is known that most if not all Painted Buntings in the eastern USA molt their feathers on or near their breeding grounds prior to fall migration. Again, the best of the simulated tracks did not hold to this strategy as molt locations (circles in Fig. 11.3) were more strongly associated with wintering locations than breeding locations, with considerable molt occurring in Cuba and Southern Mexico.

Maps for each of the origin sites used for agent-based simulations with a flight-distance penalty. Colors and symbols are the same as in Fig. 11.2
Although the distance penalty had little effect on optimal routes from Oklahoma and Texas, it did appear to influence migration from Arkansas and Mississippi. The top ten simulated birds from these areas were divided among migration routes that circumnavigated the Gulf of Mexico to the east and west (Fig. 11.3), although the majority of the birds went west. There was also some disagreement among these tracks with regard to molt strategies, as most birds molted after a substantial migratory movement, but a few molted near the breeding area. We note that the highest scoring track from Mississippi did not leave North America when the distance penalty was in effect (Fig. 11.3), which is likely due to artificially high EVI scores associated with agriculture.
Although we enabled agents to cross the Gulf of Mexico, it rarely occurred in the highest ranking simulations either with or without the distance penalty. Reports from offshore drilling operations suggest that some Painted Buntings do cross the Gulf of Mexico, although we do not have sufficient data to speculate as to the length or path of this overwater flight. It is possible that gulf-crossing is performed primarily by birds that breed near the gulf coast. These birds would benefit most from an overwater shortcut in terms of flight time and distance. Our simulations did not include gulf-coast breeders, and examination of gulf-crossing per se is not the focus of this exercise. However, simulations that start at an array of locations along the gulf coast might make for a useful follow-up exercise.
Total scaled EVI scores for the top 100 tracks were remarkably similar across the different breeding origins (Table 11.1). Tracks originating from Southwestern Texas had slightly higher scaled EVI totals than the others, which is probably due to the site’s proximity to the North American Monsoon Region. Molt dates were also slightly advanced for the best tracks from Texas, which is also likely due to the fact that these birds can reach the monsoon region sooner. Interestingly, departure dates (defined as the day that corresponds with a movement of at least 160 km from the origin) were uniform and early across the breeding sites. The same phenomenon was observed in Bridge et al. (2016), which implies that some selective force other than maximizing exposure to primary productivity is influencing the timing of migration. One possible explanation is that Painted Buntings are primarily granivorous and require plant growth that is mature enough to produce seeds. Hence, new growth might not be the best metric for evaluating favorable locations for Painted Buntings.
In summary, the simulations offer several testable hypotheses with regard to migratory connectivity among different populations of Painted Buntings. For example, birds from the eastern edge of the western population would most likely circumnavigate the Gulf of Mexico to the west, but an eastern movement is also viable. Also, it is predicted that many of these birds molt after leaving the breeding grounds. These hypotheses could be tested empirically through geolocator tracking or, in the case of molt initiation, simple field observations.
3 Further Expansion and Implementation of Agent-Based Modeling
The modeling effort presented above is one of several means by which agent-based modeling can be applied to aeroecology. Clearly, our approach could be fine-tuned more to introduce more species-specific movement parameters. Moreover, this approach could be modified to emulate the state-space samplers that underlie several animal-tracking analysis packages (Rakhimberdiev et al. 2016; Sumner et al. 2009; Wotherspoon and Sumner 2014).
A few of the potential applications for ABMs in aeroecology are mentioned above, but the list is expansive. ABMs are already used by epidemiologists, but Ross et al. (Chap. 17) offer an ABM customized to diseases spread by volant animals that not only simulates the disease agent but also the measures taken to detect and monitor the disease. Hence, this ABM lets us determine how much effort it will take to effectively track a disease. ABMs also provide a means of predicting responses to anticipated landscape changes (e.g., habitat degradation, fragmentation, corridor construction, etc.) as well as climate change. With regard to the latter, ABMs could be a valuable tool in predicting optimal timing of migratory movements under a variety of warming scenarios. Whether those optima fall within the range of phenotypic variation for a particular migratory species could provide a key means of quantifying extinction risk or range shifts as a result of climate change.
3.1 Validation
Of course, an agent-based model is ultimately a reasoned guess about how the mechanics of a particular system operate. A key element in any ABM-based study is validation. In the case of aerial and/or migratory animals, there are numerous avenues toward validation. In the example presented above, the ABM leads us to several hypotheses about widespread migration patterns in Painted Buntings that we can test in a number of ways. The most obvious means of validation might be to deploy tracking devices on birds at all of the breeding sites investigated in the ABM. However, this means of validation would have to overcome several major logistical hurdles, among them the fact that Painted Buntings, along with most other songbirds, are so small that they must be tracked with archival devices as opposed to transmitters (Bridge et al. 2011). Hence, the birds must be captured to deploy the devices and captured again, a year later, to recover them. Coordinated tracking efforts of this sort have been done (e.g., Fraser et al. 2013; Hallworth et al. 2015 #5124; Stanley et al. 2014), but they are not common.
Genetic markers offer an alternative means of validating ABM results, especially if one can identify geographical markers that distinguish among regional populations (e.g., Haig et al. 2011; Kelly et al. 2005; Ruegg et al. 2014; Rushing et al. 2014). For example, a set of genetic tools that distinguish among individuals from the six specified breeding origins would allow us to determine whether birds breeding in Arkansas and Mississippi actually travel to the North American Monsoon Region in large numbers. Similarly museum collections and observational data can serve to verify that a species does indeed occur when and where an ABM predicts it should. In the above example, we found both corroboration of ABM results from observational records and reason to dismiss some simulations as misleading. Finally, various types of radar can serve as a validation tool for ABMs. If output from an ABM is specific enough to render three-dimensional locations for flying individuals through time, it is possible to simulate how those agents would be represented by radar data (Stepanian 2015).
3.2 Tools for Agent-Based Modeling
There are numerous tools available for generating agent-based models (see Table 11.2). In choosing a modeling platform, one must generally balance ease of use with the scope and complexity of the envisioned model. The higher level modeling frameworks, such as NetLogo (Wilensky 1999) and Repast Simphony (North et al. 2013), are easy to implement, but they can be extremely slow to run if models are complex or require large numbers of agents and/or time steps (Railsback et al. 2006). Moreover, the specialized and feature-rich ABM platforms sometimes lack transparency with regard to how models actually work. For example, Romanowska (2014, #5304) complained that in NetLogo some operations are so obscure and that the user is sometimes unaware of the details that underlie a particular set of agent “decisions.” If the behavior of each agent depends on several calculations, then it would be important to know the order of those calculations. Yet, such specifications are handled “behind the scenes” in some ABM platforms.
Our analysis of Painted Bunting migration was performed with Agent Analyst (ESRI 2010), which is an ABM package that operates within ArcGIS (ESRI 2011). This package greatly simplifies the process of using real-world GIS data in an ABM framework. However, our use of Agent Analyst for the exercise described above was complicated by an obscure programming language (Not-Quite Python) and a data-leak bug that consistently caused a system crash when accessing map data directly from ArcGIS while performing large (>100,000) numbers of simulations. Ultimately, we had to forego the use of Agent Analyst’s GIS features to execute a sufficiently large series of simulations. Hence, we would only recommend this platform for models that involve static loading of map layers but do not require rapid and repeated switching of large map datasets (e.g., long sequences of daily EVI maps loaded during independent agent simulations).
Looking beyond the packages listed in Table 11.2, one can generally implement an agent-based model in any programming environment. Although ABM packages like NetLogo have appeal to the beginner and can be useful for many types of simulation, we think that most researchers who regularly build ABMs will eventually gravitate toward generalized programming tools like R, MatLab, and Python (Romanowska 2014; Zvoleff and Li 2014). A downside to this approach is that one must often start from scratch. Establishing agents, generating a virtual environment for them, and implementing behaviors in a generalized computing language could involve reinventing several of the wheels already implemented in a higher level ABM package. Perhaps the future of agent-based modeling lies in shared packages and software libraries that work within generalized environments. For example, Zvoleff (2014) has recently offered PyABM, a toolkit for implementing ABMs in Python.
The emergence of new ABM platforms is accompanied by an increasing number of sources for real-world environmental data. With increased variety and resolution of environmental data, we can come ever closer to generating arenas for ABM that mirror the real world. One of the most exciting aspects of aeroecology is the rapid development of sensor data and data infrastructure that is relevant to life in the aerosphere. Although the Painted Buntings in this example use the aerosphere as a conduit for long-distance movement, this model does not make explicit use of data that describe the aerosphere, such as air temperatures, winds aloft, or precipitation patterns. Clearly these factors influence migration routes (see Chap. 8), and several agent-based studies have focused on phenomena in the aerosphere as drivers of migration patterns. The study of Golden Eagles by Dennhardt et al. (2015; described in Sect. 1) is one example of how localized aeroecology phenomena (updrafts) shape migration patterns. A more general example of how aerosphere phenomena can shape migration routes is the optimization study by Kranstauber et al. (2015), which sought optimal migration routes for songbirds given 21 years of empirical global wind data. Although the authors do not characterize their work as an agent-based model, they effectively simulated more than one million north-to-south migratory flights of bird agents moving between 2000 pairs of randomly generated departure and destination locations. They found that optimal migration routes (i.e., those that exploited winds to minimize migration time) were on average about 25% faster than the shortest distance routes. The optimization algorithm by Kranstauber et al. (2015) will likely be an important tool in the next generation of bird-migration ABMs directed at scaling up from individuals to populations.
As tracking technologies improve and more researchers are able to follow the movements of a limited number of individuals, we will likely make increasing use of data from the aerosphere as we attempt to scale up from individuals to populations. At the same time, improvements in agent-based modeling within the field of aeroecology will be linked to improvements in both computing infrastructure and the programming skills of future researchers. We predict that the use of ABMs will expand as ecologists become more concerned with what individuals are doing and as we attempt to provide wildlife managers with more detailed predictions about how species of conservation concern will respond to different management efforts. Aggregate phenomena such as migration, communal roosting, and swarming are key features of aeroecology (see Chaps. 7, 14 and 16). The basic premise behind emergent behavior, that the behavior of the group is determined by the actions of the independent agents within the group, demands that we understand the motivations of individuals if we want to fully describe aggregate phenomena in the field of aeroecology.
References
Botkin DB, Wallis JR, Janak JF (1972) Some ecological consequences of a computer model of forest growth. J Ecol 60:849–873
Bridge ES et al (2011) Technology on the move: recent and forthcoming innovations for tracking migratory birds. Bioscience 61:689–698
Bridge ES, Ross JD, Contina AJ, Kelly JF (2016) Do molt-migrant songbirds optimize migration routes based on primary productivity? Anim Behav 27:784–792
Contina A, Bridge ES, Seavy NE, Duckles J, Kelly JF (2013) Using geologgers to investigate bimodal isotope patterns in painted buntings. Auk 130:265–272
Coss-Custard JD, Stillman RA (2008) Individual-based models and the management of shorebird populations. Nat Resour Model 21:3–71
DeAngelis DL, Grimm V (2014) Individual-based models in ecology after four decades. F1000Prime Rep 6:39
Dennhardt AJ, Duerr AE, Brandes D, Katzner TE (2015) Modeling autumn migration of a rare soaring raptor identifies new movement corridors in central appalachia. Ecol Model 303:19–29
eBird (2012) eBird: an online database of bird distribution and abundance [web application]. eBird, Ithaca. http://www.ebird.org. Accessed 23 June 2015
Erni B, Liechti F, Bruderer B (2003) How does a first year passerine migrant find its way? Simulating migration mechanisms and behavioural adaptations. Oikos 103:333–340
ESRI (2010) Agent analyst: agent based modeling extension for arcgis users. Environmental Systems Research Institute, Redlands
ESRI (2011) ArcGIS Desktop: Release 10. Environmental Systems Research Institute, Redlands
Fortmann-Roe S (2014) Insight maker: a general-purpose tool for web-based modeling & simulation. Simul Model Pract Theory 47:28–45
Fraser KC et al (2013) Consistent range-wide pattern in fall migration strategy of purple martin (progne subis), despite different migration routes at the Gulf of Mexico. Auk 130:291–296
Haig SM et al (2011) Genetic applications in avian conservation. Auk 128:205–229
Hallworth MT, Sillett TS, Van Wilgenburg SL, Hobson KA, Marra PP (2015) Migratory connectivity of a Neotropical migratory songbird revealed using archival light-level geolocators. Ecol Appl 25:336–347
Hicke JA, Lobell DB, Asner GP (2004) Cropland area and net primary production computed from 30 years of usda agricultural harvest data. Earth Interact 8(10):1–20
Jahn AE et al (2013) Migration timing and wintering areas of three species of flycatchers (tyrannus) breeding in the great plains of North America. Auk 130:247–257
Kanarek AR, Lamberson RH, Black JM (2008) An individual-based model for traditional foraging behavior: investigating effects of environmental fluctuation. Nat Resour Model 21:93–116
Kaul H, Ventikos Y (2015) Investigating biocomplexity through the agent-based paradigm. Brief Bioinform 16:137–152
Kelly JF, Ruegg KC, Smith TB (2005) Combining isotopic and genetic markers to identify breeding origins of migrant birds. Ecol Appl 15:1487–1494
Kranstauber B, Weinzierl R, Wikelski M, Safi K (2015) Global aerial flyways allow efficient travelling. Ecol Lett 18:1338–1345
Leu M, Thompson CW (2002) The potential importance of migratory stopover sites as flight feather molt staging areas: a review for neotropical migrants. Biol Conserv 106:45–56
Lowther PE, Lanyon SM, Thompson CW (1999) Painted bunting (Passerina ciris). In: Poole A, Gill F (eds) The birds of North America no. 398. The Birds of North America, Philadelphia, pp 1–28
Marceau DJ (2008) What can be learned from multi-agent systems? In: Gimblett R (ed) Monitoring, simulation and management of visitor landscapes. University of Arizona Press, Tucson, pp 411–424
North MJ, Collier NT, Ozik J, Tatara ER, Macal CM, Bragen M, Sydelko P (2013) Complex adaptive systems modeling with Repast Simphony. Complex Adapt Syst Model 1:1–26
Parrish JK, Viscido SV, Grunbaum D (2002) Self-organized fish schools: an examination of emergent properties. Biol Bull 202:296–305
Railsback SF, Lytinen SL, Jackson SK (2006) Agent-based simulation platforms: review and development recommendations. Simul Trans Soc Model Simul Int 82:609–623
Rakhimberdiev E, Senner NR, Verhoeven MA, Winkler DW, Bouten W, Piersma T (2016) Comparing inferences of solar geolocation data against high-precision GPS data: annual movements of a double-tagged black-tailed godwit. J Avian Biol 47(4):589–596
Reynolds CW (1987) Flocks, herds, and schools: a distributed behavior model. Comput Graph 21:25–34
Rohwer S, Butler LK, Froehlich DR (2005) Ecology and demography of east-west differences in molt scheduling in neotropical migrant passerines. In: Greenberg R, Marra PP (eds) Birds of two worlds. Johns Hopkins University Press, Baltimore, pp 87–105
Romanowska I (2014) How the python ate the turtle. Accessed 29 June 2015
Ruegg KC, Anderson EC, Paxton KL, Apkenas V, Lao S, Siegel RB, Desante DF, Moore F, Smith TB (2014) Mapping migration in a songbird using high-resolution genetic markers. Mol Ecol 23:5726–5739
Rushing CS, Ryder TB, Saracco JF, Marra PP (2014) Assessing migratory connectivity for a long-distance migratory bird using multiple intrinsic markers. Ecol Appl 24:445–456
Stanley CQ et al (2014) Connectivity of wood thrush breeding, wintering, and migration sites based on range-wide tracking. Conserv Biol 29:164–174
Stepanian PM (2015) Radar polarimetry for biological applications university of oklahoma. Norman, Oklahoma
Sumner MD, Wotherspoon SJ, Hindell MA (2009) Bayesian estimation of animal movement from archival and satellite tags. PLoS One 4:7324
Sykes PW Jr, Holzman S, Inigo-Elias EE (2007) Current range of the eastern population of painted bunting (Passerina ciris) part II: winter range. North Am Birds 61:378–406
Tesfatsion L (2002) Agent-based computational economics: growing economies from the bottom up. Artif Life 8:55–82
Thompson CW (1991) The sequence of molts and plumages in painted buntings and implications for theories of delayed plumage maturation. Condor 93:209–235
Wang Z, Butner JD, Cristini V, Deisboeck TS (2015) Integrated PK-PD and agent-based modeling in oncology. J Pharmacokinet Pharmacodyn 42:179–189
Wilensky U (1999) NetLogo. Center for connected learning and computer-based modeling, Northwestern University. Evanston. http://ccl.northwestern.edu/netlogo/
Wotherspoon S, Sumner M (2014) SGAT: Solar/satellite geolocation for animal tracking. https://github.com/SWotherspoon/SGAT
Yorke JA, Anderson WN (1973) Predator-prey patterns. Proc Natl Acad Sci USA 70:2069–2071
Zvoleff A (2014) PyABM: an open source agent-based modeling toolkit. http://azvoleff.com/pyabm.html. Accessed 29 June 2015
Zvoleff A, Li A (2014) Analyzing human-landscape interactions: tools that integrate. Environ Manag 53:94–111
Acknowledgements
This reasearch was aided by support from the National Science Foundation (awards 1340921, 1152356, and 0946685) and from the United States Department of Agriculture National Institute for Food and Agriculture (award 2013-67009-20369). All authors belong to the Applied Aeroecology Group, a University Sponsored Organization at the University of Oklahoma.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Bridge, E.S., Ross, J.D., Contina, A.J., Kelly, J.F. (2017). Using Agent-Based Models to Scale from Individuals to Populations. In: Chilson, P., Frick, W., Kelly, J., Liechti, F. (eds) Aeroecology. Springer, Cham. https://doi.org/10.1007/978-3-319-68576-2_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-68576-2_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-68574-8
Online ISBN: 978-3-319-68576-2
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)