
Abstract
Selective stopping is demanded in situations where responses must be suppressed to certain signals, but not others. To explore this type of inhibition, the standard stop-signal task has been modified to include a selective implementation of response inhibition by introducing a new stimulus that participants should ignore. However, a stimulus-selective stop-signal task can be performed following different strategies. Some participants fulfill the selective implementation of the stopping process after discriminating the stop and ignore signals, but some others stop the ongoing response whenever any new stimulus appears. The factors that influence this strategy choice are being explored, where both task and participant variables are under consideration. This study aimed to investigate whether the difficulty in discriminating between stop and ignore signals influences strategy adoption. Additionally, we examined whether participants modify their strategy in a flexible manner throughout the task in alternating easy and hard discrimination condition blocks. In the easy discrimination condition, the stop and the ignore signals differed both in color and shape, whereas in the hard discrimination condition, they only differed in shape. Our results from 64 participants revealed that manipulating the difficulty of signal discrimination strongly influenced strategy choice. Also, we found that participants can adapt their strategy according to task demands. They preferentially adopted a selective stopping strategy when discrimination was easy, whereas they changed to a nonselective stopping strategy under the hard discrimination condition. Overall, results from the current study suggest that signal discrimination difficulty influences the adoption of strategies in selective stopping.
Similar content being viewed by others
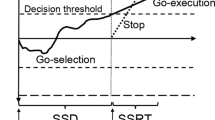
The complexity of the environment in which we function every day continuously demands adjustments in our behaviour. Such goal-oriented adjustments stem from the need to optimize the investment of limited resources in an environment that is difficult to predict. In these circumstances, our flexible adaptation mainly relies on the ability to predict future outcomes of goal-directed actions and to cancel them when they are unlikely to accomplish our objectives (Mirabella, 2014). Selective stopping paradigms (Aron, 2011) have been widely used to examine these skills. They comprise a heterogeneous set of tasks that share the conditional interruption of a response, either to a specific stimulus (stimulus-selective stopping) or regarding specific aspects of the response (motor-selective stopping). One of these paradigms is the stop-signal task, which allows for the study of the interruption of already initiated responses and enables the estimation of the covert duration of the stopping process (stop-signal reaction time [SSRT]; Verbruggen & Logan, 2009). To study the selective implementation of response cancellation, a new stimulus has been added to the typical (and global) stop-signal task. Specifically, in a stimulus-selective stop-signal task, participants are trained to respond as quickly as possible to the go stimulus, and to stop their responses whenever a stop stimulus is presented shortly after the go stimulus. However, a different stimulus (the ignore or continue stimulus) can also be presented just after the go stimulus, which signals that the participant should continue the response that has been already initiated. In this paradigm, following go stimuli, participants are first required to discriminate between stop and ignore trials. Subsequently, they have to specifically cancel the response only after stop stimuli.
Intriguingly, prior evidence has shown that not all participants perform the task as expected (Bissett & Logan, 2014). Indeed, participants follow at least two different general strategies to achieve task demands. The so-called discriminate then stop strategy (DtS) is characterized by an initial discriminating stage, which is followed by a selective response cancellation in stop trials, as theoretically expected. Conversely, some participants adopt the stop then discriminate strategy (StD), in which the response after go trials is stopped whenever a new stimulus is presented without discriminating between a stop or an ignore stimulus. Thereafter, in this second strategy, participants need to restart their response in ignore trials. Of note, SSRTs in the StD strategy would not reflect the selective implementation of response cancellation, as there is no discrimination stage. In agreement with this view, the SSRTs for participants following the StD strategy often match those observed in global stopping studies. The identification of these two general strategies is based on the analysis of differences between the mean reaction times (RTs) to the three experimental conditions of the task: go RT, failed-stop RT, and ignore RT. Mean RTs in DtS participants would show a mean ignore RT not slower than a mean go RT. By contrast, StD participants would show a mean ignore RT slower than a go RT. Regarding go and stop conditions, StD participants would show a mean failed-stop RT faster than a mean go RT. Intriguingly, it has been shown that some DtS participants violate the independence assumption between go and stop processes proposed by the horse-race model (Logan & Cowan, 1984). These participants show a mean failed-stop RT that is equal or even slower than mean go RT. This is the case of the dependent discriminate then stop strategy (dDtS), which assumes that some kind of dependency between going and stopping processes during the discrimination stage slows down both failed-stop and ignore mean RTs (Bissett & Logan, 2014). When the independence between processes is preserved, participants are classified into the Independent discriminate then stop strategy (iDtS). These participants show faster mean failed-stop RTs compared with mean go RTs.
The use of different strategies in the stimulus-selective stopping paradigm is the outcome of RT adjustments derived from task instructions. Prior knowledge can affect the choice of a strategy by modulating those processes that lead to action execution (Mirabella, 2014; Mirabella, Pani, & Ferraina, 2008). Thus, these top-down strategic adjustments based on prior knowledge can be conceptualized in terms of proactive inhibition (Aron, 2011), and this ability is impaired in several diseases characterized by poor control of urges, such as Parkinson’s disease (Mirabella, Fragola, Giannini, Modugno, & Lakens, 2017), obsessive-compulsive disorder (Mancini et al., 2018), or motor stereotypies (Mirabella, Mancini, Valente, & Cardona, 2020). Indeed, previous evidence suggests that the proactive and selective properties of action inhibition are closely related. In this sense, selective stopping requires having goals regarding which tendency to control, which necessarily involves a previous preparation to control (Aron & Verbruggen, 2008; Cai, Oldenkamp, & Aron, 2011). Accordingly, it has been observed that higher proactive control increases the selectivity in motor execution and inhibition (Greenhouse, Oldenkamp, & Aron, 2012; Majid, Cai, George, Verbruggen, & Aron, 2012; see also Smittenaar, Guitart-Masip, Lutti, & Dolan, 2013, for a more detailed description). Therefore, theoretical frameworks such as the dual mechanisms of control (DMC; Braver, 2012) might provide additional insights when investigating stimulus-selective stopping strategies. According to this view, successful cognition likely depends upon some mixture of a proactive (“early selection”) and reactive (“late correction”) modes of control. However, there are some critical differences in the experimental paradigms that have been typically used to investigate proactive inhibition and selective stopping. In this sense, a pretrial cue providing participants relevant information about the appropriate performance in a trial is often presented to participants in proactive inhibition designs (but see Mirabella et al., 2008; Mirabella et al., 2017, for a different approach). However, this pretrial cue is not provided in the stimulus-selective stop-signal task. Despite these differences, it might be speculated that the complexity of selective stopping task instructions would enable different proactive adjustments, so the use of different strategies could be reflecting different degrees of balance in the proactive–reactive control mechanism (Wessel, 2018).
Several studies have aimed to investigate the nature of the differences between strategies, delineating those factors that may influence strategy adoption. Regarding task variables, Bissett and Logan (2014) observed a significant association between relative signal frequency and strategy adoption. Concretely, the StD strategy was chosen when stopping was frequently demanded (speeding the stopping process), whereas the DtS strategy was preferred when stopping was infrequently demanded (speeding ignore RT at the expense of slower SSRT). Importantly, these authors also observed that the same participants alternated between the two different strategies based on the frequency of the stop and ignore signals within an experimental session. These data suggest that participants can flexibly adjust their strategy based on task demands. Interestingly, results from another study show that manipulating the difficulty to map stopping processes onto their respective stimuli would also bias strategy selection (Verbruggen & Logan, 2015).
The discrimination between stop and ignore signals plays a central role in the theoretical description of strategy profiles in selective stopping (Bissett & Logan, 2014). In contrast to the findings of prior work (see the review of eight studies that used selective stopping paradigms by Bissett & Logan, 2014), the StD strategy was adopted by most participants in two experiments in which differences between stop and ignore signals were minimized by using perceptually similar geometric shapes that only differed in their orientation (Sánchez-Carmona, Albert, & Hinojosa, 2016; Sánchez-Carmona, Santaniello, Capilla, Hinojosa, & Albert, 2019). By contrast, when color was used to discriminate between the signals, the iDtS strategy was preferred (Rincón-Pérez et al., 2020). Altough the difficulty of signal discrimination was not directly manipulated in these studies, their results provide indirect evidence for the role of this variable in selective stopping and highlight the need to explicitly address this question.
Therefore, the aim of the present study was to directly investigate whether the perceptual discrimination difficulty between stop and ignore signals can bias strategy adoption in selective stopping. Additionally, we examined if participants can flexibly modify their strategy in response to this manipulation. To this end, we varied the similarity between stop and ignore signals in two experimental conditions: hard discrimination and easy discrimination. We hypothesize that StD will be the dominant strategy in hard discrimination condition blocks, because this strategy can be considered as more conservative. Conversely, when discrimination is easier, we expect that most participants will choose the DtS strategy.
Method
Participants
Ethical approval for this study was obtained from the Ethics Committee of the Universidad Autónoma de Madrid (UAM). Seventy-one undergraduate students (mean age = 19.66, SD = 4.14; 68 females) participated in the study. All of them provided informed consent prior to the experiment and were rewarded with course credits. No participant reported history of psychiatric disorder, and all had normal or corrected-to-normal vision.
Given the importance of the speed–accuracy trade-off in stop-signal tasks, participants’ performance was assessed through a multivariate model approach to discard those participants that were not performing the task properly. Thus, each observation was regressed onto an accuracy measure (number of responses omitted to the target, having discounted those responses that were emitted just after the trial ended) and two speed measures (mean go reaction time and mean stop-signal delay, or SSD). After that, we computed the Cook’s distance for each observation, measuring the change in the fitted prediction with and without the presence of each of these observations. Those observations that had a Cook’s distance larger than 4 times the mean were classified as outliers. Following this procedure, seven participants were eliminated. Thus, the final sample consisted of 64 individuals.
Stimuli and task
Every subject performed a stimulus-selective stop-signal task. In this task, participants are asked to stop their responses only to a specific stimulus. There were three types of trials: go, stop, and ignore trials. In go trials, participants had to respond as fast as possible by pressing the space bar on a keyboard with their dominant hand whenever a white down pointing arrow on a black background was displayed. To simplify the whole task and leave the discrimination between signals as the main influencing dimension of the paradigm, a one-stimulus-to-one-response mapping was used in go trials. Intertrial delay was set to 0.5 or 1 seconds, with a similar probability. In an infrequent proportion of trials (40%), a new stimulus was displayed briefly after go stimuli. If it was a stop stimulus (20%), participants were asked to stop their ongoing response, and, if it was an ignore stimulus (20%), participants just had to continue responding, as if it was a go trial. SSD was initially set at 250 ms and was dynamically adjusted by ±50 ms, depending on the participant’s previous performance. By this staircase algorithm, the final probability of responding to a given signal was approximately 0.5. The ignore signal delay (ISD) just reproduced the previous SSD, and no adaptation was implemented according to task performance. Every stimuli remained on the screen until the trial ended, at 1,500 ms. Since the aim of our study was to measure how the difficulty in the stimulus discrimination stage between stop and ignore signals influences behavioural performance, two sets of stop and ignore stimuli were used. In the easy discrimination condition, stop and ignore stimulus were represented by a red diamond and a green square, respectively. Notice that in the easy discrimination condition both shape and color differed between stop and ignore stimuli, and also that each of them were associated to semantically significant colors. In the difficult discrimination condition, both stimuli only differed in shape, and color was kept in white (see Fig. 1).

Schematic representation of easy discrimination and hard discrimination blocks. ms = milliseconds; ITD = intertrial delay; SSD = stop-signal delay; ISD = ignore signal delay
Stimuli were presented in 4 alternating easy and hard discrimination blocks, the order of administration was counterbalanced between subjects. To ensure task instructions were understood, a practice block was presented where the participant performed both easy and hard discrimination blocks. These practice blocks kept the stimuli ratio constant, but consisted of less trials. Thus, every participant performed four main blocks of 250 trials each, and two practice blocks of 30 trials each. A cue that said “Color Block” or “Shape Block” was presented before each block.
Participants performed the experiment seated comfortably in a semi sound attenuated room. Task stimuli were presented on a computer monitor that was positioned at eye level about 65 cm in front of the participant. The stimuli were displayed on a 19-inch LCD-LED Samsung 943 N color monitor, with a 75-Hz refresh rate, a 5:4 aspect ratio, and a resolution of 1,024 × 768. The task was designed and implemented in MATLAB, using Psychtoolbox (www.psychtoolbox.org). The MATLAB script of STOP-IT (Verbruggen, Logan, & Stevens, 2008) served as starting point for programming our stimulus-selective stop-signal task.
Power analyses
Two a priori power analyses were performed using G*Power 3.1 software (Faul, Erdfelder, Lang, & Buchner, 2007). On the one hand, an a priori power analysis was used to calculate the number of trials required for determining the strategy used by each participant in each discrimination difficulty condition. With an α = 0.05, a power of P = 1 − β = 0.8, and a medium size effect d of 0.5, as well as an allocation ratio between both samples of 0.2 (ignore)/0.1(failed stop), the minimum number of trials needed are 30 ignore, 27 failed stop, and 275 go trials for the t tests as described in the Data Analysis section. On the other hand, given that a reduced number of participants by category is expected, the Freeman–Halton extension of Fisher’s exact test (Freeman & Halton, 1951) is used to study whether participants changed their strategy based on task demands. Thus, using an α = 0.05, a power of P = 1 − β = 0.8–0.95, a high size effect w of 0.5 (based on Bissett & Logan’s, 2014, data), and 3 degrees of freedom, it was estimated that the total sample size required should be between 44 (β = 0.8) and 69 (β = 0.95) valid participants.
Data analysis
Following the methodology of Bissett and Logan (2014), we first assessed general performance in the task in terms of speed and precision, collapsing across strategies. Thus, to study speed differences, repeated-measures amalyses of variance (ANOVAs) were conducted to analyze the mean RTs, with perceptual discrimination difficulty (two levels: hard and easy) and trial type (three levels: go, failed-stop, and ignore) as within-subjects factors. The Greenhouse–Geisser (GG) epsilon correction was applied to adjust the degrees of freedom of the F ratios where necessary, and post hoc comparisons for determining the significance of pairwise contrasts were made using the Bonferroni procedure (alpha < 0.05). To study precision differences, we performed two repeated-measures t tests comparing the mean number of omissions and perseverations in each discrimination condition. To precisely compute omission errors (go and ignore trials with no response) and perseverative responses (a response emitted before displaying a go stimulus), we examined the intertrial interval of the next trial. If this period contained a response, we considered this event as an atypically slow response instead of an omission. Consequently, this atypically slow response was also not computed as a perseverative response.
Subsequently, the strategy of each participant was identified by performing two independent-sample t tests at the level of each subject to contrast go RTs with both failed-stop and ignore RTs. According to these results, the iDtS strategy was identified if failed-stop RT < go RT ≮ ignore RT, the StD strategy was identified if failed-stop RT < go RT < ignore RT, and the dDtS strategy was identified if participants showed failed-stop RT ≮ go RT < ignore RT. Moreover, to compare the evidence for and against the null hypothesis without bias (Rouder, Speckman, Sun, Morey, & Iverson, 2009), each t value obtained was transformed into a Bayes factor. Bayes factor represents a ratio between the likelihood of data given the null hypothesis and the likelihood of data given the alternative hypothesis. Thus, t values and sample sizes of each contrast were submitted to Rouder’s Bayes factor calculator on the Perception and Cognition Lab website (http://pcl.missouri.edu/bf-two-sample). The Jeffrey–Zellner–Siow prior was used since there are not any a priori assumptions (Rouder et al., 2009).
After classifying each participant according to the adopted strategy, we examined whether the ratio of strategy choice varied depending on discrimination difficulty. To this aim, contingency tables were used to evaluate the association between discrimination conditions and strategy. As previously mentioned, we expected that certain strategies would be chosen by a reduced number of participants, so chi-squared tests would be inappropriate here. Instead, the Freeman–Halton extension of Fisher’s exact test (Freeman & Halton, 1951) was used to study whether participants changed their strategy as a consequence of task demands. To explore the flexibility and the direction of the strategy adaptation, the proportion of each change profile (the change or maintenance of a given strategy from hard to easy blocks) was also studied.
SSRTs were computed via the integration method, since this approach is less biased than the traditional mean method when the normality criterion in the go RT distribution is violated (Verbruggen, Chambers, & Logan, 2013). As Bissett and Logan (2014) reported, in the dDtS strategy the independent horse-race model would be violated because of dependence between going and discriminating signals (stop and ignore). Consequently, the SSRT cannot be estimated in the classical way (based on the underlying go RT distribution). However, Bissett and Logan also argued that if going were slowed to the same degree on both stop and ignore trials, the SSRT could be estimated based on the ignore RT distribution. Importantly, if such assumption is not satisfied, that solution would not be valid, so SSRTs computed using the ignore RT distribution should be interpreted with caution. Thus, SSRTs were computed for both go and ignore RT distributions. Data from this study are available in the figshare repository (https://doi.org/10.6084/m9.figshare.12045102.v1).
Results
Precision across blocks
The omissions rate comparison did not show any statistical significance, t(63) = 1.353, p = .181, d = 0.18, BF10 = 0.92. No difference was observed in perseverative errors between easy and hard discrimination conditions, t(63) = −0.685, p = .496, d = 0.09, BF10 = 0.81. Means and standard deviations across conditions are shown in Table 1.
Speed across blocks
The repeated-measures ANOVA revealed a significant main effect of perceptual discrimination difficulty, F(1, 63) = 6.15, p = .02, ƞp2 = 0.09, BF10 = 14.86: Participants were faster in easy discrimination blocks than in hard discrimination blocks, collapsing across trials (diference of 23.54 ms, 95% CI [4.57, 42.51]). The main effect of trial type was also significant, F(2, 84.19) = 204.01, p < .001, ƞp2 = 0.76, BF10 = 2.65. Post hoc t tests with Bonferroni correction for multiple comparisons revealed that failed-stop RTs were faster than go RTs, t(63) = 11.61, p < .001, d = 1.74, BF10 = 2.10e+14; difference of 76.36 ms, 95% CI [60.17, 92.54], and that go RTs were also faster than ignore RTs, t(63) = 10.61, p < .001, d = 1.39,BF10 = 4.92e+12; difference of 32.09 ms, 95% CI [24.65, 39.52]. This last result would preserve the independence assumption established by the horse race model (Verbruggen & Logan, 2009). The interaction of both factors was also significant, F(2, 103.74) = 13.95, p < .001, ƞp2 = 0.18, BF10 = 1.18. The nature of this interaction is reported in Fig. 2. Post hoc t tests with the Bonferroni correction showed that mean failed-stop RTs in easy discrimination blocks were significantly faster than mean failed-stop RTs in hard discrimination blocks, t(63) = 2.25, p = .03, d = 0.28, BF10 = 2.29; difference of 21.76 ms 95% CI [2.46, 41.06]. The same was true for mean ignore RTs, t(63) = 3.71, p < .001, d = 0.46, BF10 = 54.29; difference of 38.31 ms, 95% CI [17.66, 58.95]. By contrast, go RTs did not differ between discrimination conditions, t(63) = 1.07, p = .30, d = 0.13, BF10 = 0.84; difference of 10.55 ms, 95% CI [−9.24, 30.35].

Speed differences between task blocks. The black star denotes significant differences between trials (p < .05). Error bars denote 95 % CI
Following Verbruggen and Logan (2009), failed-stop trials theoretically correspond to the fastest tail of the complete go RT distribution. Thus, it may be hard to understand why mean go RTs did not differ between discrimination conditions, while mean failed-stop RTs did. To explore the nature of this unexpected result, we performed an additional analysis. Skew is an important characteristic of RT distributions in most stop-signal experiments (Verbruggen et al., 2013), and we proposed that it could be worth conceptualizing the go RT distributions as positively skewed (i.e., ex-Gaussian distribution) and then study their differences. Consequently, it could be argued that a discrete central tendency statistic would fail to capture the real difference between easy and hard discrimination go RT distributions. Accordingly, we fit the go RTs of each participant in each condition to an ex-Gaussian distribution, characterized by the mu, sigma, and tau parameters. Then, we performed three repeated-measures t tests to evaluate the differences between each of these three parameters. We observed a lower mu parameter for easy than for hard discrimination go RT distribution, t(63) = 2.1, p = .04, d = 0.26, BF10 = 1.85, difference of 25.11 ms 95% CI [1.22, 49.01], and a tau parameter higher for easy than for hard go RT distribution, t(63) = 2.18, p = .03, d = 0.27, BF10 = 2.07, difference of 13.46 ms, 95% CI [1.13, 25.79]. Together, these results could explain why differences were observed in failed-stop RT distributions, whereas no differences were observed in the mean go RT distribution between discrimination conditions. The sigma parameter did not differ between conditions, t(63) = 0.6, p = .55, d = 0.07, BF10 = 0.84, difference of 3 ms, 95% CI [−6.92, 12.94].
The SSD did not differ between discrimination conditions, t(63) = 1.07, p = .29, d = 0.13, BF10 = 0.84, difference of 17.92 ms, 95% CI [−15.02, 49.39]. The SSRT (computed over go RT distribution) was significantly faster in easy than in hard discrimination conditions, t(63) = 2.28, p = .03, d = 0.28, BF10 = 2.39, difference of 22.09 ms, 95% CI [2.69, 41.51]. However, this last result should be interpreted with caution given that some of the participants included in the computation adopted the dDtS strategy, in which the SSRT estimation would be inappropriate.
Strategies across blocks
Having identified the strategy that characterized each participant’s performance in easy and hard discrimination conditions (see Supplementary Material for bayes factors results), the following ratio was observed (see Fig. 3).

Proportion of strategy choice by discrimination condition. iDtS = independent discriminate then stop strategy; StD = stop then discriminate strategy; dDtS = dependent discriminate then stop strategy; ED = easy discrimination condition; HD = hard discrimination condition
In the easy discrimination condition, the dominant strategy was the iDtS, selected by 34 participants. The StD strategy was observed in 23 participants, and only three selected the dDtS strategy. In the easy discrimination condition, it was not possible to classify four participants due to equivalent RTs between trials. In the hard discrimination condition, the predominant strategy was the StD (32 participants), followed by the iDtS strategy (18 participants), and the dDtS strategy (10 participants). In the hard discrimination condition, again, four participants were not classified under any strategy. Strategy adoption was thus modulated by the perceptual discrimination difficulty (Fisher’s exact test = 10.13, p = .016, Cramer’s V = 0.28). Specifically, the typified residuals analysis between observed and expected frequencies revealed that in our sample there was a significantly higher proportion of participants choosing an iDtS strategy in easy than in hard discrimination conditions. Regarding the StD strategy, there was not a significant difference in the proportion of participants in each discrimination condition. Finally, the proportion of participants following a dDtS strategy was significantly higher in hard than in easy discrimination conditions.
This scenario could also be interpreted in terms of the way that each participant modified their strategy according to discrimination difficulty. Most participants adopted an StD strategy in hard discrimination condition blocks and later flexibly adapted their performance to adopt an iDtS strategy in easy discrimination condition blocks and vice versa. Concretely, 25% of the whole sample modified their strategy in this way. However, it is worth mentioning that 21.8% of the participants followed an StD strategy in both conditions, and 20.3% followed an iDtS strategy during the whole experiment (see Fig. 4).

Percentage of change profiles in strategy from hard discrimination condition blocks to easy discrimination condition blocks. No participant reported an iDtS–dDtS profile. iDtS = independent discriminate then stop strategy; StD = stop then discriminate strategy; dDtS = dependent discriminate then stop strategy
Discussion
In the current study, all participants were instructed to selectively stop their responses to stop stimuli and to continue responding to ignore stimuli. However, in agreement with previous evidence (Bissett & Logan, 2014), we observed that a considerable proportion of participants performed the task without fulfilling this requirement. Indeed, two main groups can be differentiated considering the sequence of processes involved to achieve task demands: the DtS and the StD strategies. Moreover, the DtS strategy group can be further divided into two subgroups, depending on whether they fulfill the independence assumption between stopping and going processes. In those participants following a dDtS strategy the independence assumption is compromised, thus posing important restraints for the estimation of the SSRT. In contrast, those participants that choose the iDtS strategy would satisfy all the requirements of this computation. This strategy classification is currently achieved by constrasting the mean go, failed-stop, and ignore RTs (Bissett & Logan, 2014). It is also supported by the results from electrophysiological and haemodynamic studies (Sánchez-Carmona et al., 2016; Sánchez-Carmona et al., 2019; Sebastian et al., 2017).
Besides these findings, as we have already noted, our understanding about the factors that influence strategy adoption in different individuals is rather scarce. Recent findings suggest that the choice of strategy could be influenced by genetics (Rincón-Pérez et al., 2020). Specifically, it has been found that strategy adoption was modulated by the interaction of two relevant dopaminergic polymorphisms (in COMT and DRD2 genes). Regarding task variables, Bissett and Logan (2014) found that strategy adoption might also be modulated by the relative frequency of signals (stop and ignore). Moreover, modifying the difficulty with which stopping processes are mapped onto their respective stimuli would also bias strategy selection (Verbruggen & Logan, 2015). In the current study we aimed to further examine a task dimension that might influence strategy adoption in a selective stopping task. Furthermore, we tested whether participants could modify their strategy profile when they were confronted with an easy perceptual discrimination condition (color & shape) with respect to a difficult discrimination condition (only shape) .
First, a global analysis of task performance showed that participants were faster in the easy relative to the hard discrimination conditions, but only in those trials in which stimuli discrimination played a critical role (i.e., stop and ignore). It should be noted that the go trial was the same between discrimination conditions (a down-pointing arrow), whereas stop and ignore trials were not. Importantly, in both easy and hard conditions, the mean failed-stop RT was significantly faster than the mean go RT, which indicates that the independence assumption between stopping and going processes is fulfilled. Thus, simplifying the go task in the current study did not lead to violations of the race model (Verbruggen et al., 2019). Moreover, interferences between stop-signal presentation and go stimulus encoding were also unlikely, since the mean SSD for each task block was enough to process each stimulus (see Table 1).
As we hypothesized, perceptual discrimination difficulty influenced strategy choice in the stimulus-selective stop-signal task. Concretely, the dominant strategy in the easy discrimination blocks was the iDtS, more closely associated with task instructions. Conversely, in the hard discrimination blocks, participants mostly followed the StD strategy. In line with the suggestions made by Bissett and Logan (2014), our data indicate that the StD strategy may be a reflection of conservative task performance, which is mainly adopted when participants find it difficult to stop to achieve task demands (i.e., low frequency of stop signal trials or difficult discrimination between stop and ignore signals). It could be speculated that individual differences in psychological traits such as impulsivity, could also bias strategy selection in the same way. Thus, it would be interesting to explore in future research how strategy choice differs between typically developing individuals and those with psychiatric or neurodevelopmental disorders characterized by deficits in response inhibition, such as attention-deficit/hyperactivity disorder (Chmielewski et al., 2019; Hart, Radua, Nakao, Mataix-Cols, & Rubia, 2013; López-Martín, Albert, Fernández-Jaén, & Carretié, 2015), obsessive-compulsive disorder (Mancini et al., 2018), or motor stereotypies (Mirabella et al., 2020).
A main conclusion of the present study is that participants flexibly adapt their strategy depending on the discrimination difficulty between stop and ignore trials. The most common profile was to follow an iDtS strategy in the easy discrimination blocks that changed to an StD strategy in hard discrimination blocks (25% of participants), regardless of the order of presentation. However, it is also worth mentioning that an important set of participants did not change their strategy across blocks (StD, 21.88%; iDtS, 20.31%). These results closely reproduce those reported by Bissett and Logan (2014). As these authors claimed, it is possible that these participants only had a single strategy available and were therefore unable to switch strategies. Nonetheless, even though strategy adoption seems to be highly unintentional, an interesting question for future research will be to examine if strategies can change as a consequence of explicit instructions or by rewarding specific dimensions of participants’ behaviour.
Importantly, the design used in the current study allows us to draw some conclusions about the causes of the dependency observed between going and discrimination processes in participants following a dDtS strategy. Bissett and Logan (2014) proposed three potential explanations for this dependence. Among them, the dual-task interference hypothesis grants special importance to the discrimination stage, which is the main variable that we manipulated in the present study. This explanation suggests that the discrimination process and the go process may either rely on the same processing bottleneck (Pashler, 1994; Welford, 1952) or share common resources (Dux & Marois, 2009; Navon & Gopher, 1979). Discriminating the signal may occupy the bottleneck or take resources away from go processing, which slows both go RT and ignore RT. Thus, discriminating stop and ignore signals that are perceptually similar, as in the hard condition blocks, could be particularly demanding. Beyond discrimination difficulty, we cannot rule out the possibility that current results could be due to an increase in inhibitory control, working memory, and/or attentional demands in the hard discrimination versus the easy discrimination condition. Importantly, the dual-task explanation would also predict that simpler two-stimuli-to-two-response go mapping may reduce the dependency between go and stop stimulus discrimination (Bissett & Logan, 2014). Accordingly, it could be speculated that the decision to simplify the go task to highlight the influence of discrimination difficulty on strategy adoption resulted in a considerable increase of participants following an iDtS strategy, regardless of the discrimination difficulty. We already observed a similar effect in a previous study (Rincón-Pérez et al., 2020). Previous work by Bissett and Logan (2014, Experiment 1) found that the dDtS strategy was one of the two most common strategies. In contrast, only a low percentage of participants followed this strategy in the two condition blocks of our study. Nonetheless, an interesting finding is that in the hard discrimination blocks, in which the discrimination stage could be predicted to take resources away from the go process, we observed an increased number of participants choosing a dDtS strategy (n = 10 vs. n = 3). Thus, it could be argued that the dependency between going and discrimination processes in selective stopping would take place during both the stimulus-to-response mapping and the discrimination stage, and enhanced demands at these processing stages lead to an increase in the proportion of participants following the dDtS stategy. Future studies might explore this interaction to provide addtional support to the dual-task interference hypothesis in selective stopping (Bissett & Logan, 2014; Verbruggen & Logan, 2015).
Beyond genetics and task-related variables such as the probability of appearance of stop/ignore signals and the difficulty of signal discrimination, other factors probably play a role in the adoption of selective stopping strategies. Considering that in stop-signal tasks it is explicitly mentioned that stop signals may occur at any time, participants might perform the task by anticipating an upcoming need to stop. Thus, performance in this task would reflect a balance between proactive and reactive inhibition (Braver, 2012; Cai et al., 2011; Wessel, 2018). In this sense, proactive and selective inhibtion are thought to be strongly interrelated. Selective stopping involves maintaining goals regarding those responses that have to be cancelled (response-selective stopping) or about which specific stimulus indicates that responses should be cancelled (stimulus-selective stopping). This would involve a preparation to control that would necessarily need to occur in advance (Aron & Verbruggen, 2008; Cai et al., 2011). Indeed, studies on response-selective stopping have shown higher selectivity in motor execution and inhibition as proactive control increases (Greenhouse et al., 2012; Majid et al., 2012; Smittenaar et al., 2013). To our knowledge, no study has yet examined either the influence of proactive inhibition in the stimulus-selective stopping task or its role on strategy adoption. According to the DMC framework (Braver, 2012), it could be speculated that participants following iDtS and StD strategies might differ in terms of the degree and the timing of the activation of the stopping-goal representation. It could be the case that some participants become more conservative in their response tendencies when they detect conflict. Alternatively, sensitivity to this conflict might have increased in some participants (Aron, 2011). Finally, it could also be speculated that different strategies are associated with different ways to tonically apply proactive control before the response tendency is triggered. After all, as proposed by the model of goal-oriented actions (Mirabella, 2014), proactive control is thought to be implemented by a monitoring system that deals with the computation of predictions about future rewards and the detection of discrepancies between expected and actual outcomes. This system is actively involved in all the processing steps of the model (i.e., early and late “should-I-stay-or-should-I-go” decisions, goal and action selection, and action execution). Nonetheless, further studies are needed specifically designed to clarify the role of proactive inhibition in stimulus-selective stopping strategies. Indeed, unpublished data from our lab suggest that proactive inhibitory control (measured as poststop and postignore slowing) also predicts strategy choice in the stimulus-selective stop-signal task (Sánchez-Carmona et al., 2019). These findings would support the notion that differences in preparatory control mechanisms influence strategy adoption.
Another factor that may influence strategy choice in selective stopping is attentional capture. Attentional capture highly characterizes stop-signal trials, and it has been frequently intermixed with response inhibition (Albert et al., 2013; Sharp et al., 2010). Given that ignore and stop-signal trials are similar in timing and frequency, ignore trials have been proposed as an excellent attentional capture control condition (Sánchez-Carmona et al., 2016; Sharp et al., 2010). Nonetheless, some participants could experience a stronger attentional capture induced by the unexpected displaying of signals (stop and/or ignore), which would have resulted in motor slowing and might have influenced strategy adoption. Finally, the influence of working memory on the choice of strategy should not be ruled out. Differences in the ability to retain task instructions could result in changes in RT and accuracy measures, thus biasing participants’ strategy choice. Further research is needed to examine the role of attentional capture and working memory in the modulation of strategies in the stimulus-selective stop-signal task.
In sum, the current results shed light on the role of some task variables that influence strategy choice in selective stopping. We found that the difficulty to discriminate signals strongly influences the adoption of different strategies. Additionally, we showed that individuals can adapt their strategy according to changes in task demands. In this sense, participants preferred the selective stopping strategy when discrimination was easy, whereas they changed to a nonselective stopping strategy under the hard discrimination condition.
References
Albert, J., López-Martín, S., Hinojosa, J. A., & Carretié, L. (2013). Spatiotemporal characterization of response inhibition. Neuroimage, 76, 272–281.
Aron, A. R. (2011). From reactive to proactive and selective control: Developing a richer model for stopping inappropriate responses. Biological Psychiatry, 69(12), e55–e68.
Aron, A. R., & Verbruggen, F. (2008). Stop the presses: Dissociating a selective from a global mechanism for stopping. Psychological Science, 19(11), 1146–1153.
Bissett, P. G., & Logan, G. D. (2014). Selective stopping? Maybe not. Journal of Experimental Psychology: General, 143(1), 455.
Braver, T. S. (2012). The variable nature of cognitive control: a dual mechanisms framework. Trends in Cognitive Sciences, 16(2), 106–113.
Cai, W., Oldenkamp, C. L., & Aron, A. R. (2011). A proactive mechanism for selective suppression of response tendencies. Journal of Neuroscience, 31(16), 5965–5969.
Chmielewski, W., Bluschke, A., Bodmer, B., Wolff, N., Roessner, V., & Beste, C. (2019). Evidence for an altered architecture and a hierarchical modulation of inhibitory control processes in ADHD. Developmental Cognitive Neuroscience, 36, 100623.
Dux, P. E., & Marois, R. (2009). The attentional blink: A review of data and theory. Attention, Perception, & Psychophysics, 71(8), 1683–1700.
Faul, F., Erdfelder, E., Lang, A.-G., & Buchner, A. (2007). G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behavior Research Methods, 39, 175–191.
Freeman, G. H., & Halton, J. H. (1951). Note on an exact treatment of contingency, goodness of fit and other problems of significance. Biometrika, 38(1/2), 141–149.
Greenhouse, I., Oldenkamp, C. L., & Aron, A. R. (2012). Stopping a response has global or nonglobal effects on the motor system depending on preparation. Journal of Neurophysiology, 107(1), 384–392.
Hart, H., Radua, J., Nakao, T., Mataix-Cols, D., & Rubia, K. (2013). Meta-analysis of functional magnetic resonance imaging studies of inhibition and attention in attention-deficit/hyperactivity disorder: Exploring task-specific, stimulant medication, and age effects. JAMA Psychiatry, 70(2), 185–198.
Logan, G. D., & Cowan, W. B. (1984). On the ability to inhibit thought and action: A theory of an act of control. Psychological Review, 91(3), 295.
López-Martín, S., Albert, J., Fernández-Jaén, A., & Carretié, L. (2015). Emotional response inhibition in children with attention-deficit/hyperactivity disorder: Neural and behavioural data. Psychological Medicine, 45(10), 2057–2071.
Majid, D. A., Cai, W., George, J. S., Verbruggen, F., & Aron, A. R. (2012). Transcranial magnetic stimulation reveals dissociable mechanisms for global versus selective corticomotor suppression underlying the stopping of action. Cerebral Cortex, 22(2), 363–371.
Mancini, C., Cardona, F., Baglioni, V., Panunzi, S., Pantano, P., Suppa, A., & Mirabella, G. (2018). Inhibition is impaired in children with obsessive-compulsive symptoms but not in those with tics. Movement Disorders, 33(6), 950–959.
Mirabella, G. (2014). Should I stay or should I go? Conceptual underpinnings of goal-directed actions. Frontiers in Systems Neuroscience, 8, 206.
Mirabella, G., Fragola, M., Giannini, G., Modugno, N., & Lakens, D. (2017). Inhibitory control is not lateralized in Parkinson's patients. Neuropsychologia, 102, 177–189.
Mirabella, G., Mancini, C., Valente, F., & Cardona, F. (2020). Children with primary complex motor stereotypies show impaired reactive but not proactive inhibition. Cortex, 124, 250–259.
Mirabella, G., Pani, P., & Ferraina, S. (2008). Context influences on the preparation and execution of reaching movements. Cognitive Neuropsychology, 25(7/8), 996–1010.
Navon, D., & Gopher, D. (1979). On the economy of the human-processing system. Psychological Review, 86(3), 214.
Pashler, H. (1994). Dual-task interference in simple tasks: data and theory. Psychological Bulletin, 116(2), 220.
Rincón-Pérez, I., Echeverry-Alzate, V., Sánchez-Carmona, A. J., Bühler, K. M., Hinojosa, J. A., … Albert, J. (2020). The influence of dopaminergic polymorphisms on selective stopping. Behavioural Brain Research, 381, 112441.
Rouder, J. N., Speckman, P. L., Sun, D., Morey, R. D., & Iverson, G. (2009). Bayesian t tests for accepting and rejecting the null hypothesis. Psychonomic Bulletin & Review, 16(2), 225–237.
Sánchez-Carmona, A. J., Albert, J., & Hinojosa, J. A. (2016). Neural and behavioral correlates of selective stopping: Evidence for a different strategy adoption. Neuroimage, 139, 279–293.
Sánchez-Carmona, A. J., Santaniello, G., Capilla, A., Hinojosa, J. A., & Albert, J. (2019). Oscillatory brain mechanisms supporting response cancellation in selective stopping strategies. NeuroImage, 197, 295–305.
Sebastian, A., Rössler, K., Wibral, M., Mobascher, A., Lieb, K., Jung, P., & Tüscher, O. (2017). Neural architecture of selective stopping strategies: Distinct brain activity patterns are associated with attentional capture but not with outright stopping. Journal of Neuroscience, 37(40), 9785–9794.
Sharp, D. J., Bonnelle, V., De Boissezon, X., Beckmann, C. F., James, S. G., Patel, M. C., & Mehta, M. A. (2010). Distinct frontal systems for response inhibition, attentional capture, and error processing. Proceedings of the National Academy of Sciences of the United States of America, 107(13), 6106–6111.
Smittenaar, P., Guitart-Masip, M., Lutti, A., & Dolan, R. J. (2013). Preparing for selective inhibition within frontostriatal loops. Journal of Neuroscience, 33(46), 18087–18097.
Verbruggen, F., Aron, A. R., Band, G. P., Beste, C., Bissettt, P. G., Brockett, A. T., … Colzato, L. S. (2019). A consensus guide to capturing the ability to inhibit actions and impulsive behaviors in the stop-signal task. Elife, 8, e46323.
Verbruggen, F., Chambers, C. D., & Logan, G. D. (2013). Fictitious inhibitory differences: how skewness and slowing distort the estimation of stopping latencies. Psychological Science, 24(3), 352–362.
Verbruggen, F., & Logan, G. D. (2009). Models of response inhibition in the stop-signal and stop-change paradigms. Neuroscience & Biobehavioral Reviews, 33(5), 647–661.
Verbruggen, F., & Logan, G. D. (2015). Evidence for capacity sharing when stopping. Cognition, 142, 81–95.
Verbruggen, F., Logan, G. D., & Stevens, M. A. (2008). STOP-IT: Windows executable software for the stop-signal paradigm. Behavior Research Methods, 40(2), 479–483.
Welford, A. T. (1952). The psychological refractory period and the timing of high-speed performance-a review and a theory. British Journal of Psychology, 43(1), 2.
Wessel, J. R. (2018). Surprise: A more realistic framework for studying action stopping? Trends in Cognitive Sciences, 22(9), 741–744.
Acknowledgments
This work was supported by grants PSI2017-84922-R (MINECO-FEDER), PGC2018-098558-B-I00 (MINECO-FEDER), PSI2015-68368-P (MINECO-FEDER), SI1/PJI/2019-00061 (Comunidad de Madrid-UAM), and H2019/HUM-5705 (Comunidad de Madrid).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Open practices statement
The data for this experiment are available (https://doi.org/10.6084/m9.figshare.12045102.v1). The study was not preregistered.
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
ESM 1
(DOCX 22 kb)
Rights and permissions
About this article

Cite this article
Sánchez-Carmona, A.J., Rincón-Pérez, I., López-Martín, S. et al. The effects of discrimination on the adoption of different strategies in selective stopping. Psychon Bull Rev 28, 209–218 (2021). https://doi.org/10.3758/s13423-020-01797-6
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13423-020-01797-6