
Abstract
In this study, we designed an oil-filled motor that can be used at full-ocean depths, and investigated the friction losses caused by the rotating seal and the properties of the oil. The direct current (DC) motor is encapsulated in an aluminum alloy housing. A rubber diaphragm is used to balance the internal and external pressures so that the motor can work on the seabed without pressure difference. To study the resistance caused by the rotating seal, a numerical model of the Glyd ring and the rotating shaft was established. Results from a rotational torque test agreed with those from numerical analysis. The kinematic viscosity of four oils was measured at 1–25 °C. Oil bath experiments in an incubator showed that the resistance from oil is highly correlated with its dynamic viscosity. Dimethicone appears to be very suitable as an insulating oil for these motors. The working characteristics of the motor were tested in a high-pressure chamber. The results showed that the motor needs to overcome higher oil resistance under higher pressure. A prototype of a pressure-adaptive motor was designed and applied successfully in the hadal zone at a water depth of more than 10000 m.
摘要
目的
设计一种压力自平衡式充油电机以适应全海深工作的需求, 并探究输出轴处旋转密封件的摩擦阻以及四种不同类型油的粘性阻力, 为深海电动执行器的设计提供参考。
创新点
1. 提出了旋转密封用格莱圈对电机输出轴旋转阻力的影响。2. 通过仿真与实验相结合的方法探究了几种不同的液压油在不同温度下电机的粘性阻力影响。
方法
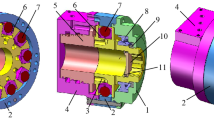
1. 在分析对比磁耦合电机与充油电机的基础上, 设计充油电机的结构(图1), 并介绍其控制方式和工作模式(图2)。2. 从两个方面研究充油电机的摩擦损耗特性: 首先, 研究旋转密封对电机的摩擦损耗, 在有限元分析软件Abaqus中建立分析模型(图3), 得到不同压缩率下的旋转密封接触压力分布(图4), 并搭建旋转密封测试平台以验证分析结果(图5); 其次, 研究充油类型在高压和低温情况下对充油电机工作的影响。3. 基于Fluent建立充油电机旋转分析模型, 并得到其在不同温度、不同油类型下的油粘损耗(图8)。4. 在高压舱内进行测试, 研究高压对电机工作性能的影响(图10)。5. 介绍所研制的电机在马里亚纳海沟的应用(图14)。
结论
1. 旋转密封格莱圈对于电机的摩擦阻力随着压缩率的增大而增大, 并且其启动阻力约为稳定运行时阻力的2.5倍。2. 电机所受到的粘性阻力与油的动力粘度高度正相关。3. 二甲基硅油是充油电机用油的合适选择之一; 其粘性阻力低且在低温下的动力粘度变化不大。
Similar content being viewed by others


References
Bai YF, Zhang QF, Fan YL, et al., 2018. Research and experiment on viscous friction power loss of deep-sea electric manipulator. Proceedings of OCEANS-MTS/IEEE Kobe Techno-Oceans, p.1–4. https://doi.org/10.1109/OCEANSKOBE.2018.8559121
Bai YF, Zhang QF, Zhang AQ, 2021. Modeling and optimization of compensating oil viscous power for a deep-sea electric manipulator. IEEE Access, 9:13524–13531. https://doi.org/10.1109/ACCESS.2021.3052165
Cai MJ, Wu SJ, Yang CJ, 2016. Effect of low temperature and high pressure on deep-sea oil-filled brushless DC motors. Marine Technology Society Journal, 50(2):83–93. https://doi.org/10.4031/MTSJ.50.2.8
Chen JW, Huang Y, Lin Y, et al., 2020. A novel sediment pressure sampling device carried by a hadal-rated lander. Journal of Marine Science and Engineering, 8(11):839. https://doi.org/10.3390/jmse8110839
Du MR, Peng XT, Zhang HB, et al., 2021. Geology, environment, and life in the deepest part of the world’s oceans. The Innovation, 2(2):100109. https://doi.org/10.1016/j.xinn.2021.100109
Dubbioso G, Muscari R, di Mascio A, 2014. Analysis of a marine propeller operating in oblique flow. Part 2: very high incidence angles. Computers & Fluids, 92:56–81. https://doi.org/10.1016/j.compfluid.2013.11.032
Fu M, Yan H, Yin ZY, et al., 2019. Coupling calculation of 3D whole domain steady flow and temperature field for underwater oil-filled brushless DC motors. Proceedings of the 22nd International Conference on Electrical Machines and Systems, p.1–6. https://doi.org/10.1109/ICEMS.2019.8922073
Gasparoto HF, Chocron O, Benbouzid M, et al., 2021. Advances in reconfigurable vectorial thrusters for adaptive underwater robots. Journal of Marine Science and Engineering, 9(2):170. https://doi.org/10.3390/jmse9020170
Ji B, Luo XW, Peng XX, et al., 2012. Numerical analysis of cavitation evolution and excited pressure fluctuation around a propeller in non-uniform wake. International Journal of Multiphase Flow, 43:13–21. https://doi.org/10.1016/j.ijmultiphaseflow.2012.02.006
Kang YJ, Liu SJ, Zou WS, et al., 2019. Design and analysis of an innovative deep-sea lifting motor pump. Applied Ocean Research, 82:22–31. https://doi.org/10.1016/j.apor.2018.10.018
Li GR, Chen XP, Zhou FH, et al., 2021. Self-powered soft robot in the Mariana trench. Nature, 591(7848):66–71. https://doi.org/10.1038/s41586-020-03153-z
Li JJ, Xu YX, Zou JB, et al., 2009. Rotor eddy-current loss of permanent magnet machine in brushless AC and DC modes, used for deep-sea HUV’s propeller. Proceedings of the International Conference on Electrical Machines and Systems, p.1–4. https://doi.org/10.1109/ICEMS.2009.5382701
Li JJ, Zhou JB, Jiang XT, et al., 2010. Electrical-thermal coupled calculation of a submersible motor used for deep-sea electromagnetic propeller. Proceedings of the Digests of the 14th Biennial IEEE Conference on Electromagnetic Field Computation, p.1. https://doi.org/10.1109/CEFC.2010.5481401
Meng JH, 2021. Sliding mode variable structure chaos control for propulsion motor of deep sea robot. Journal of Physics: Conference Series, 2025:012077. https://doi.org/10.1088/1742-6596/2025/1/012077
Qiu ZL, 2008. Design and research on a variable ballast system for deep-sea manned submersibles. Journal of Marine Science and Application, 7(4):255–260. https://doi.org/10.1007/s11804-008-7092-y
Romanov VS, Goldstein VG, 2018. The dynamic improvement methods of energy efficiency and reliability of oil production submersible electric motors. Journal of Physics: Conference Series, 944:012099. https://doi.org/10.1088/1742-6596/944/1/012099
Smith KL, Teal JM, 1973. Deep-sea benthic community respiration: an in situ study at 1850 meters. Science, 179(4070): 282–283. https://doi.org/10.1126/science.179.4070.282
Umapathy A, Babu SM, Vedachalam N, et al., 2019. Influence of deep-sea ambient conditions in the performance of pressure-compensated induction motors. Marine Technology Society Journal, 53(1):67–73. https://doi.org/10.4031/mtsj.53.1.7
Wang H, Chen JW, Wang YH, et al., 2020. Research and analysis of pressure-maintaining trapping instrument for macro-organisms in hadal trenches. Journal of Marine Science and Engineering, 8(8):596. https://doi.org/10.3390/JMSE8080596
Xu YM, Meng DW, Liu YL, et al., 2010. Amelioration research of submersible motor design method. Proceedings of the Asia-Pacific Power and Energy Engineering Conference, p.1–4. https://doi.org/10.1109/APPEEC.2010.5449324
Zhang X, Luan ZD, Yan J, et al., 2012. Development of a deep-sea sediment long coring system based on a Jackhammer for R/V Kexue. Proceedings of the Oceans, p.1–6. https://doi.org/10.1109/OCEANS.2012.6404782
Zou JB, Qi WJ, Xu YX, et al., 2012. Design of deep sea oil-filled brushless DC motors considering the high pressure effect. IEEE Transactions on Magnetics, 48(11):4220–4223. https://doi.org/10.1109/TMAG.2012.2204731
Acknowledgments
This study is supported by the National Key R&D Program of China (No. 2018YFC0310601), the Strategic Priority Research Program of the Chinese Academy of Science (No. XDA22000000), the National Key Research and Development Program of China (Nos. 2016YFC0300800 and 2017YFC006500), and the Key Program of Sanya Yazhouwan, China. We are grateful to the team of the Yuanweishiyan LANDER, and the pilots, captain, and crews of the R/V Tansuoyihao for their professional service during the TS-21 cruises organized by the Institute of Deep-sea Science and Engineering, Chinese Academy of Sciences.
Author information
Authors and Affiliations
Contributions
Hao WANG mainly designed the device. Hao WANG and Jia-wang CHEN processed the data. Hao WANG and Chen CAO drafted the manuscript. Jin GUO, Wei WANG, and Peng ZHOU helped to organize the manuscript. Peng ZHOU helped to design the device.
Corresponding author
Additional information
Conflict of interest
Hao WANG, Chen CAO, Jin GUO, Wei WANG, Peng ZHOU, and Jia-wang CHEN declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Wang, H., Cao, C., Guo, J. et al. Design and friction loss study of full-ocean depth oil-filled direct current motor. J. Zhejiang Univ. Sci. A 23, 587–598 (2022). https://doi.org/10.1631/jzus.A2100375
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/jzus.A2100375