
Abstract
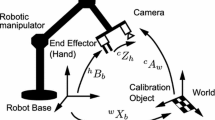
To solve the homogeneous transformation equation of the form AX=XB in hand-eye calibration, where X represents an unknown transformation from the camera to the robot hand, and A and B denote the known movement transformations associated with the robot hand and the camera, respectively, this paper introduces a new linear decomposition algorithm which consists of singular value decomposition followed by the estimation of the optimal rotation matrix and the least squares equation to solve the rotation matrix of X. Without the requirements of traditional methods that A and B be rigid transformations with the same rotation angle, it enables the extension to non-rigid transformations for A and B. The details of our method are given, together with a short discussion of experimental results, showing that more precision and robustness can be achieved.
Similar content being viewed by others


References
Daniilidis, K., 1999. Hand-eye calibration using dual quaternions. Int. J. Rob. Res., 18(3):286–298. [doi:10.1177/02783649922066213]
Fassi, I., Legnani, G., 2005. Hand to sensor calibration: a geometrical interpretation of the matrix equation AX=XB. J. Rob. Syst., 22(9):497–506. [doi:10.1002/rob.20082]
Park, F.C., Martin, B.J., 1994. Robot sensor calibration: solving AX=XB on the Euclidean group. IEEE Trans. on Rob. Autom., 10(5):717–721. [doi:10.1109/70.326576]
Shiu, Y.C., Ahmad, S., 1989. Calibration of wrist-mounted robotics sensors by solving homogeneous transform equations of the form AX=XB. IEEE Trans. on Rob. Autom., 5(1):16–27. [doi:10.1109/70.88014]
Tsai, R., Lenz, R., 1989. A new technique for fully autonomous and efficient 3D robotics hand/eye calibration. IEEE Trans. on Rob. Autom., 5(3):345–358. [doi:10.1109/70.34770]
Zhang, Z.Y., 2000. A flexible new technique for camera calibration. IEEE Trans. on Pattern Anal. Machine Intell., 22(11):1330–1334. [doi:10.1109/34.888718]
Zhao, Z., Liu, Y., 2006. Hand-eye Calibration Based on Screw Motions. 18th Int. Conf. on Pattern Recognition, p.1022–1026. [doi:10.1109/ICPR.2006.620]
Zhuang, H., 1998. Hand/eye calibration for electronic assembly robots. IEEE Trans. on Rob. Autom., 14(4):612–616. [doi:10.1109/70.704231]
Zhuang, H., Roth, Z.S., 1991. Comments on “Calibration of wrist-mounted robotic sensors by solving homogeneous transform equations of the form AX=XB”. IEEE Trans. on Rob. Autom., 7(6):877–878. [doi:10.1109/70.105398]
Zhuang, H., Roth, Z.S., 1995. Simultaneous calibration of a robot and a hand-mounted camera. IEEE Trans. on Rob. Autom., 11(5):649–660. [doi:10.1109/70.466601]
Author information
Authors and Affiliations
Corresponding author
Additional information
Project (No. 60703002) supported by the National Natural Science Foundation of China
Rights and permissions
About this article
Cite this article
Liang, Rh., Mao, Jf. Hand-eye calibration with a new linear decomposition algorithm. J. Zhejiang Univ. Sci. A 9, 1363–1368 (2008). https://doi.org/10.1631/jzus.A0820318
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/jzus.A0820318
Key words
- Homogeneous transformation equation
- Singular value decomposition (SVD)
- Optimal rotation matrix
- Rigid transformations