
Abstract
In this work, we deal with two-point Riemann–Liouville fractional boundary value problems. Firstly, we establish a new comparison principle. Then, we show the existence of extremal solutions for the two-point Riemann–Liouville fractional boundary value problems, using the method of upper and lower solutions. The performance of the approach is tested through a numerical example.
Similar content being viewed by others

1 Introduction
The purpose of this paper is to consider the existence of solution for the following nonlinear fractional differential equation with two-point boundary conditions:
where \(f\in C([a,b]\times R,R)\); \(A,B\in R\); \({}^{L}D^{\alpha }_{a^{+}}\) and \(I^{2-\alpha }_{a^{+}}\) denote the Riemann–Liouville fractional derivative of order α and the Riemann–Liouville fractional integral of order \(2-\alpha \), respectively.
The monotone iterative technique, combined with the method of upper and lower solutions, is a powerful tool for proving the existence of solutions for nonlinear ordinary differential equations [1–3] and for nonlinear Caputo fractional differential equations of order \(0< \alpha <2\), see [4–7] and the references therein. Also many people paid attention to the existence result of solution of the initial value problem for fractional differential equations involving Riemann–Liouville fractional derivative of order \(0 < \alpha <1\), see [8–11] and the references therein. However, only few papers considered the method of lower and upper solutions for Riemann–Liouville fractional differential equations with order \(1 < \alpha < 2\).
In this paper, we present a method based on upper and lower solutions to prove the existence of solutions for Riemann–Liouville fractional differential equations (1.1). We establish a new comparison principle and show the existence of extremal solutions for (1.1), applying the monotone iterative technique and the method of lower and upper solutions. Moreover, we consider a numerical example to illustrate the accuracy of the presented method.
2 The comparison principle
Let \(C(J)\) denote the Banach space of all continuous functions from \(J=[a,b]\) into R with the norm \(\|x\|_{C}=\mbox{sup}_{t \in J}|x(t)|\). Let \(AC(J)\) be the space of functions f which are absolutely continuous on J and \(AC^{m}(J)=\{f:J\rightarrow \mathbb{R}\mbox{ and }f^{(m-1)}(x)\in AC(J)\}\). To define the solutions of (1.1), we also consider \(C_{2-\alpha }(J)=\{x:x\in C(a,b],(t-a)^{2- \alpha }x(t)\in C(J), 1 <\alpha < 2\}\) with the norm \(\|x\|_{C_{2- \alpha }}=\sup \{(t-a)^{2-\alpha }|x(t)|:t\in J\}\). Obviously, the space \(C_{2-\alpha }(J)\) is a Banach space.
We recall the following definitions and basic properties from fractional calculus. For more details, one can see [12].
Definition 2.1
The integral
is called Riemann–Liouville fractional integral of order α, where Γ is the gamma function.
Definition 2.2
For a function \(f(t)\) given in the interval \([0,\infty)\), the expression
where \(n=[\alpha ]+1\), \([\alpha ]\) denotes the integer part of number \(\alpha >0\), is called the Riemann–Liouville fractional derivative of order α.
Lemma 2.1
([12])
Let \(\alpha >0\), \(m=[\alpha ]+1\), and let \(x_{m-\alpha }(t)=I^{m-\alpha }_{a^{+}}x(t)\) be the fractional integral of order \(m-\alpha \). If \(x(t)\in L^{1}(a,b)\) and \(x_{m-\alpha }(t)\in AC^{m}(J)\), then we have the following equality:
For \(1<\alpha <2\) and \(u\in C_{2-\alpha }(J)\), we easily get
From Lemma 2.1 and simple calculations, we also have the following.
Lemma 2.2
The linear boundary value problem
where M is a constant and \(\sigma \in C_{2-\alpha }(J)\), has the following integral representation of solution:
where
By Lemma 2.2, we may say that \(u\in C_{2-\alpha }(J)\) is a solution of (1.1) if the following integral equation holds:
Lemma 2.3
([5])
Let G be the Green function given in Lemma 2.2. Then
-
(1)
\(G(t,s)\geq 0\) for all \(a\leq t,s\leq b\);
-
(2)
\(\max_{t\in J}G(t,s)=G(s,s)\), \(s\in J\);
-
(3)
\(G(s,s)\) has a unique maximum, given by
$$\max_{s\in J}G(s,s)=G\biggl(\frac{a+b}{2},\frac{a+b}{2} \biggr)=\frac{1}{ \Gamma (\alpha)}\biggl(\frac{b-a}{4}\biggr)^{\alpha -1}; $$ -
(4)
\({\int^{b}_{a}G(t,s)\,ds\leq \frac{1}{\Gamma (\alpha)}}\frac{(\alpha -1)^{ \alpha -1}}{\alpha^{\alpha +1}}(b-a)^{\alpha }\).
Lemma 2.4
Suppose that M satisfies the following inequality:
Then problem (2.2) has a unique solution.
Proof
Define the operator \(T:C_{2-\alpha }(J)\rightarrow C_{2-\alpha }(J)\) by
We will show that the operator T has a unique fixed point. Let \(u,v\in C_{2-\alpha }(J)\). By Lemma 2.3, one has
That is to say, T is a contracting operator on \(C_{2-\alpha }(J)\). Therefore, the operator T has a unique fixed point, and we get the desired result. □
The key tool to get our main results is the following comparison principle.
Lemma 2.5
If \(x\in C_{2-\alpha }(J)\) and satisfies the relations
with
Then, for any \(t\in (a,b)\), \(x(t)\leq 0\).
Proof
Suppose that there exists \(t\in (a,b)\) such that \(x(t)> 0\). Let \(x(t^{*})=\max \{x(t):t\in (a,b)\}=\rho \), \(\rho >0\). From (2.5), there exist \(q(t)\geq 0\) and \(A^{*}\leq 0\), \(B^{*}\leq 0\) such that
By Lemmas 2.2 and 2.3, we obtain that \(\forall t\in (a,b)\),
Let \(t=t^{*}\), one has
So
which contradicts \(M\frac{1}{\Gamma (\alpha)}\frac{(\alpha -1)^{ \alpha -1}}{\alpha^{\alpha +1}}(b-a)^{\alpha }<1\). Hence \(x(t)\leq 0\), \(\forall t\in (a,b)\). The proof is complete. □
Remark 2.1
Note that the following inequality
holds, i.e., (2.4) implies (2.6).
For problem (1.1), we list the definitions of upper and lower solutions below.
Definition 2.3
A function \(\varphi \in C_{2-\alpha }(J)\) is called a lower solution of problem (1.1) if it satisfies
Analogously, the function \(\phi \in C_{2-\alpha }(J)\) is called an upper solution of problem (1.1) if it satisfies
The following assumptions will be used in the sequel:
3 The main result
In this section, we prove the existence of extremal solutions of problem (1.1) by the monotone iterative technique.
Theorem 3.1
Let (H) hold. Suppose that \(\eta,\theta \in C_{2-\alpha }(J)\) such that
Then \(\varphi (t)\leq \eta (t)\leq \theta (t)\leq \phi (t)\), and \(\theta (t)\), \(\eta (t)\) are an upper and a lower solution of (1.1), respectively.
Proof
By Lemma 2.4, η and θ are well defined. Let \(m(t)=\varphi (t)-\eta (t)\). Then
By Lemma 2.5, we have \(m(t)\leq 0\), that is, \(\varphi (t) \leq \eta (t)\), \(\forall t\in (a,b)\). A similar argument using the property of upper solution of problem (1.1) gives \(\theta (t) \leq \phi (t)\), \(\forall t\in (a,b)\).
Again, let \(\omega (t)=\eta (t)-\theta (t)\). By (2.9) , we have
By Lemma 2.5 again, we also have \(\omega (t)\leq 0\), that is, \(\eta (t)\leq \theta (t)\), \(\forall t\in (a,b)\). Then
Next, we prove that \(\eta (t)\) is the lower solution of (1.1). Note that
Furthermore, by \(I^{2-\alpha }_{a^{+}}\eta (t)|_{t=a}=A\) and \(\eta (b)=B\) and the definition of lower solution, we easily get that \(\eta (t)\) is a lower solution of (1.1). Similarly, \(\theta (t)\) is an upper solution of (1.1). The proof is complete. □
Theorem 3.2
Suppose (H) holds, then there exist monotone iterative sequences \(\{u_{n}\}, \{v_{n}\}\subset [\varphi,\phi ]\) such that \(u_{n}\rightarrow u^{*}\), \(v_{n}\rightarrow v^{*}\) (\(n\rightarrow \infty\)) uniformly in \([\varphi,\phi ]\), and \(u^{*}\), \(v^{*}\) are a minimal and a maximal generalized solution of (1.1) in \([\varphi,\phi ]\), respectively.
Proof
For any \(u_{n-1}, v_{n-1}\in C_{2-\alpha }(J)\), \(n\geq 1\), we may define two sequences \(\{u_{n}\}, \{v_{n}\}\subset [\varphi,\phi ]\) satisfying the following equation:
By Lemma 2.4, \(\{u_{n}\}\) and \(\{v_{n}\}\) are well defined. Now, using Theorem 3.1 and induction, we immediately conclude that
Using the standard arguments, moreover, it is easy to show that \(\{(t-a)^{2-\alpha }u_{n}\}\) and \(\{(t-a)^{2-\alpha }v_{n}\}\) are uniformly bounded and equicontinuous in \(C(J)\). By the Arzela–Ascoli theorem, we obtain that \((t-a)^{2-\alpha }u_{n}\rightarrow (t-a)^{2- \alpha }u^{*}\), \((t-a)^{2-\alpha }v_{n}\rightarrow (t-a)^{2-\alpha }v ^{*}\) (\(n\rightarrow \infty\)) uniformly in J, i.e., \(u_{n}\rightarrow u^{*}\), \(v_{n}\rightarrow v^{*}\) (as \(n\rightarrow \infty\)) in \(C_{2-\alpha }(J)\) and that \(u^{*},v^{*}\in [\varphi,\phi ]\) are solutions of problem (1.1).
Finally, we prove that \(u^{*}\) and \(v^{*}\) are a minimal and a maximal solution of (1.1) in \([\varphi,\phi ]\), respectively. Let \(u(t)\in C_{2-\alpha }(J)\) be any solution of (1.1). Suppose that there exists a positive integer n such that \(u_{n}(t)\leq u(t) \leq v_{n}(t)\), \(t\in J\). Let \(\lambda (t)=u_{n+1}(t)-u(t)\). By (2.9), we have
Besides, \(I^{2-\alpha }_{a^{+}}\lambda (t)|_{t=a}=0\) and \(\lambda (b)=0\). By Lemma 2.5, we get \(\lambda \leq 0\), that is, \(u_{n+1}(t)\leq u(t)\). Similar to the proof of above, we get \(u(t)\leq v_{n+1}(t)\). Since \(u_{0}\leq u(t)\leq v_{0}\), then \(u_{n}\leq u(t)\leq v_{n}\), by induction, taking the limit \(n\rightarrow \infty \), we obtain \(u^{*}\leq u(t)\leq v^{*}\). This completes the proof. □
4 Numerical example
We apply the previous analysis and general numerical scheme to an example to verify the performance of the proposed approach.
Consider the following problem:
Taking \(u_{0}(t)\equiv 0\), \(v_{0}(t)\equiv 1\), we have
which shows that \(u_{0}(t)\) and \(v_{0}(t)\) are a lower and an upper solution of (4.1), respectively. On the other hand, note that \(f(t,u(t))=-\frac{1}{30}u^{2}(t)e^{t}-\frac{1}{30}u(t)e^{t}- \frac{1}{30}e^{t}\) is valid for
where \(u_{0}(t)\leq y\leq x\leq v_{0}(t)\). Hence the constant M used in the algorithm is \(M=\frac{1}{30}<\frac{\sqrt{\pi }}{2}\). To sum up, condition (H) of Theorem 3.2 is satisfied. Then (4.1) has two extremal generalized solutions \(u^{*},v^{*}\in [u _{0},v_{0}]\) which are obtained by taking limits from its iterative sequences.
Applying Lemma 2.2 and (4.1) to (3.5) and (3.6), we have
where
and a similar formula for \(v_{n}(t)\). Let \(u_{ni}\approx u_{n}(t_{i})\), \(f_{j}^{n}=e^{s_{j}}u^{2}_{n}(s_{j})+(e^{s_{j}}-1)u_{n}(s_{j})+e^{s _{j}}\), and \(G_{ij}=G(t_{i},s_{j})\). Then, using the composite trapezoidal quadrature formula to approximate the integral on the right-hand side of (4.2), we can obtain the following linear system:
where \(t_{i}=ih\), \(h=\frac{1}{N}\), \(0< i\leq N\), \(N\in N^{+}\). So, (4.3) can be written as a matrix-vector system:
where \(U_{n}=(u_{n1},u_{n2},\ldots,u_{nN})^{T}\), \(F_{n-1}=(f _{1}^{n-1},f_{2}^{n-1},\ldots,f_{N}^{n-1})^{T}\) and I is an identity matrix.
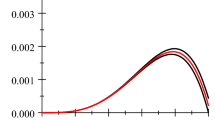
Here, for a given accuracy ϵ, we take \(u_{n}\) and \(v_{n}\) as ϵ-accurate approximations of \(u^{*}\) and \(v^{*}\), respectively, according to the stopping criteria \(E(n)< \epsilon \), \(E(n)\) is defined by \(E(n)=\max \{|v_{n}(t)-u_{n}(t)|:t \in (0,1]\}\). We found that for \(\epsilon =10^{-10}\), at \(n=N=4\), error values \(E(4)<\epsilon \). Table 1 displays \(E(n)\) versus n for selected values of n, and the graphs of \(u_{n}\), \(v_{n}\), for selected values of n, are plotted in Fig. 1.

The graphs of \(u_{n}\) and \(v_{n}\), \(n=0,1,2,3\), for example
References
Cabada, A., Habvets, P., Lois, S.: Monotone method for the Neumann problem with lower and upper solutions in the reverse order. Appl. Math. Comput. 117, 1–14 (2001)
Cabada, A., Sanchez, L.: A positive operator approach to the Neumann problem for a second order ordinary differential equation. J. Math. Anal. Appl. 204, 774–785 (1996)
Cherpion, M., De Coster, C., Habets, P.: A constructive monotone iterative method for second-order BVP in the presence of lower and upper solutions. Appl. Math. Comput. 123, 75–91 (2001)
Al-Refai, M., Hajji, M.A.: Monotone iterative sequences for nonlinear boundary value problems of fractional order. Nonlinear Anal. 74, 3531–3539 (2011)
Ferreira, R.A.C.: Existence and uniqueness of solutions for two-point fractional boundary value problems. Electron. J. Differ. Equ. 2016, 202 (2016)
Shi, A., Zhang, S.: Upper and lower solutions method and a fractional differential equation boundary value problem. Electron. J. Qual. Theory Differ. Equ. 30, 1 (2009)
Zhang, L., Ahmad, B., Wang, G.: Monotone iterative method for a class of nonlinear fractional differential equations on unbounded domains in Banach spaces. Filomat 31, 1331–1338 (2017)
Bai, Z., Zhang, S., Sun, S., Yin, C.: Monotone iterative method for fractional differential equations. Electron. J. Differ. Equ. 2016, 6 (2016)
Liu, Z.H., Li, X.W.: Approximate controllability of fractional evolution systems with Riemann–Liouville fractional derivatives. SIAM J. Control Optim. 53(4), 1920–1933 (2015)
Wei, Z., Li, G., Che, J.: Initial value problems for fractional differential equations involving Riemann–Liouville sequential fractional derivative. J. Math. Anal. Appl. 367, 260–272 (2010)
Zhang, S.: Monotone iterative method for initial value problem involving Riemann–Liouville fractional derivatives. Nonlinear Anal. 71, 2087–2093 (2009)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Acknowledgements
The authors are very grateful to Professor Wang Dongling of Northwestern University for his help and suggestions in the process of numerical calculation.
Funding
The authors were supported by the National Natural Science Foundation of China (Nos. 11671101, 11661012) and Special Funds of Guangxi Distinguished Experts Construction Engineering, NSF of Guangxi (No. 2018GXNSFDA118167), Qinzhou University project (No. 2018KYQD03).
Author information
Authors and Affiliations
Contributions
The authors have made the same contribution. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Tang, B., Zhao, J. & Liu, Z. Monotone iterative method for two-point fractional boundary value problems. Adv Differ Equ 2018, 182 (2018). https://doi.org/10.1186/s13662-018-1632-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1632-9