
Abstract
This paper addresses the stability problem of a class of switched positive nonlinear systems (SPNSs). Both continuous-time systems and discrete-time systems are studied. By applying the minimum dwell-time (MDT) approach, we design time-dependent switching rules under which the continuous-time SPNSs is asymptotically stable. For the corresponding discrete-time case, a sufficient condition is given for exponential stability of SPNSs. In addition, the MDT switching signals are designed via analyzing the weighted \(l_{\infty}\) norm for the considered systems. Finally, a numerical example is provided to illustrate the effectiveness of our result.
Similar content being viewed by others


1 Introduction
The qualitative theory of dynamic systems such as oscillation criterion and stability property has been widely studied and many results have been reported [1–8]. As a special class of dynamic systems, positive systems are those systems whose states always take nonnegative values as long as the initial conditions are nonnegative. Examples of this type are frequently encountered in real word, such as populations levels in biology [9], industrial process involving chemical reactors [10]. In recent years, more and more researchers have focussed on the theory of positive systems because of their importance in applications [11–15]. In the literature on positive systems, the stability property takes an important position and it has been comprehensively studied from different fields [16–19].
As is well known, positive LTI systems have many special and interesting properties. For example, it was proved in [20] the stability of positive LTI systems is delay-independent, which implies that time delays have no effect on the stability of the systems. In [21], some simple criteria for exponential stability of positive LTI systems were presented. Up to now, positive linear-time invariant (LTI) systems are well understood [20–22]. As many physical systems are nonlinear, it is natural to extend the stability theory of positive linear systems to nonlinear systems. Recently, some excellent work has been done on positive nonlinear systems called cooperative homogeneous systems. For example, [23] showed that the global asymptotic stability (GAS) of the time-delay cooperative homogeneous systems can be concluded from the GAS of the corresponding delay-free systems.
On the other hand, switched systems, which are a class of hybrid systems, have received much attention in the past decades. Many researchers have highlighted and investigated the switched system theory [24–26]. As a special class of positive systems, switched positive systems that inherit the feature of both switched systems and positive systems have also received ever-increasing research interest [27–32]. The stability of switched positive linear systems (SPLSs) has been extensively discussed by the approach of common or multiple linear co-positive Lyapunov functions such as [19, 28, 29, 32]. However, the popular approaches for analyzing SPLSs cannot be applied for the SPNSs. The stability theory for SPNSs is considerably less well-developed, so there is a need to exploit valid methods to study it.
Note that the author of [27] only studied the switched positive systems with the degree of homogeneity one. However, when the degree is not constrained to be one, the systems turn to be more complicated, such as the decay rate may depend on initial conditions at each switched instant. In this case, it is worth studying whether it is possible to design suitable switching signals to keep the system stable. In addition, the results in [33] only dealt with asymptotical stability of positive systems. As is known to us, switched systems may be unstable even if we ensure that all the subsystems are stable. Therefore, it is meaningful to combine the positive systems with switched systems. Based on the previous discussion, in this paper, using the method which does not involve the Lyapunov–Krasovskii function, we study the SPCHSs with the degree greater than one for the first time. The main contributions of this paper are as follows. For the continuous-time SPCHSs, we present a sufficient condition for asymptotic stability of SPCHSs of degree \(\alpha >1\) by using the MDT approach. Then, a sufficient condition is also obtained for exponential stability of discrete-time case with the degree \(\alpha \geq 1\) under MDT switching. In addition, a new class of the MDT switching signals are designed via analyzing the weighted \(l_{\infty }\) norm of the considered systems.
In Sect. 2, we introduce the notation and review some preliminaries and the main results of this paper are stated in Sect. 3. Section 4 provides a number example to show the effectiveness of our results. Finally concluding remarks are given in Sect. 5.
2 Notation and preliminaries
2.1 Notation
\(\mathbb{R}\), \(\mathbb{N}\) and \(\mathbb{N}_{0}\) are the sets of real numbers, natural numbers and natural numbers including zero, respectively. \(\mathbb{R}^{n}\) means the n-dimensional Euclidean space. Let \(\mathbb{R}^{n}_{+}:=\{\boldsymbol{x}\in \mathbb{R}^{n}, x_{j}\geq 0, 1\leq j\leq n\}\). Given two vectors \(\boldsymbol{x},\boldsymbol{y}\in \mathbb{R}^{n}\), we write: \(\boldsymbol{x}\geq \boldsymbol{y}\), if \(x_{j}\geq y_{j}\), for \(1 \leq j \leq n\); \(\boldsymbol{x} > \boldsymbol{y}\), if \(\boldsymbol{x} \geq \boldsymbol{y}\) and \(\boldsymbol{x} \neq \boldsymbol{y}\); \(\boldsymbol{x} \gg \boldsymbol{y}\), if \(x_{j} > y_{j}\), \(1 \leq j \leq n\). \(x_{j}\) is used to denote the jth component of x. Similarly, \(x_{pj}\) stands for the jth coordinate of vector \(\boldsymbol{x}_{p}\). In [14] the definition of weighted \(l_{\infty }\) norm is defined by a vector \(\boldsymbol{\upsilon }\gg 0\), as
For matrix \(A \in \mathbb{R}^{n\times n}\), \(a_{ij}\) denotes its entry in row i and column j. Given a real \(n \times n\) matrix \(A=(a_{ij})_{n\times n}\), it is Metzler if its off-diagonal entries \(a_{ij}\) (\(i \neq j\)) are nonnegative. Let \(C([a, b],\mathbb{ R}^{n})\) be the space of continuous functions from \([a, b]\) to \(\mathbb{R}^{n}\). The upper-right Dini-derivative of a continuous function \(h: \mathbb{R} \rightarrow \mathbb{R}\) is defined by
2.2 Preliminaries
Next, we present some definitions and results which are used in this paper.
Definition 1
The vector field \(\boldsymbol{f}: \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}\) is called homogeneous of degree \(\alpha >0 \), if
Definition 2
The vector field \(\boldsymbol{f}: \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}\) which is continuous differentiable on \(\mathbb{R}^{n} \setminus \{\boldsymbol{0}\}\) is said to be cooperative if the Jacobian matrix \({\frac{\partial \boldsymbol{f}}{\partial \boldsymbol{x}}}(\boldsymbol{a})\) is Metzler for all \(\boldsymbol{a}\in \mathbb{ R}^{n}\setminus \{\boldsymbol{0}\}\).
It follows from Remark 3.1 in [34] that the cooperative systems satisfy the following property.
Proposition 1
Let \(\boldsymbol{f}: \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}\) be cooperative. For any two vector x and y in \(\mathbb{R}^{n}_{+}\) with \(\boldsymbol{x} \geq \boldsymbol{y}\) and \(x_{j}= y_{j}\), we have \(f_{j}(\boldsymbol{x}) \geq f_{j}(\boldsymbol{y})\).
Definition 3
A vector field \(\boldsymbol{g}: \mathbb{R}^{n}\rightarrow \mathbb{R}^{n}\) is said to be order-preserving on \(\mathbb{R}^{n}_{+}\), if \(\boldsymbol{g}(\boldsymbol{x}) \geq \boldsymbol{g}(\boldsymbol{y})\) for any \(\boldsymbol{x},\boldsymbol{y} \in \mathbb{R}^{n}_{+}\) such that \(\boldsymbol{x}\geq \boldsymbol{y}\).
Definition 4
Consider a switched sequence \(0=t_{0}< t_{1}<\cdots<t _{k}<\cdots\) . Let \(\Delta t_{k}=t_{k+1}-t_{k}\), \(k\in \mathbb{N}_{0}\). The constant τ is called the minimum dwell time of the switching signals if \(\tau = \inf_{k\in \mathbb{N}_{0}} \Delta t_{k}\).
We now give the definition of exponentially stable for discrete-time contexts of SPNSs. Let \(\Vert \cdot \Vert \) be some norm on \(\mathbb{R}^{n}\).
Definition 5
Consider a fixed class of MDT switching signals. The solution \(\boldsymbol{x}(k)\) of system (12) is exponentially stable if there exist two constants \(a>0\) and \(0< b<1\) such that \(\boldsymbol{x}(k)\) satisfies
3 Main results
3.1 Continuous-time case
In this subsection, we consider the following switched nonlinear system:
where \(\boldsymbol{x}(t)=[x_{1}(t),x_{2}(t),\ldots,x_{n}(t)]\) is the state vector and \(\sigma (t):[0,+\infty )\rightarrow M={\{1,2,\ldots,m}\}\) is a piecewise constant, right continuous function. \(\forall p \in M\), \(\boldsymbol{f}_{p}:\mathbb{R}^{n}\rightarrow \mathbb{R}^{n}\) is continuously differentiable on \(\mathbb{R}^{n} \backslash \{\boldsymbol{0}\}\). In addition, throughout this section, \(\forall p \in M\), \(\boldsymbol{f}_{p}\) always satisfies Assumption 1.
Assumption 1
-
(i)
\(\forall p\in M\), \(\boldsymbol{f}_{p}\) is cooperative on \(\mathbb{R}^{n}_{+} \backslash \{\boldsymbol{0}\}\).
-
(ii)
\(\forall p\in M\), \(\boldsymbol{f}_{p}\) is homogeneous of degree α.
Remark 1
It should be pointed that, for every \(p\in M\), as \(\boldsymbol{f}_{p}\) is defined cooperative and homogeneous, the system (1) is positive under arbitrary switching laws. This implies that for every \(\boldsymbol{x}(0)\in \mathbb{R}^{n}_{+}\) the corresponding state trajectory \(\boldsymbol{x}(t)\in \mathbb{ R}^{n}_{+}\) for all \(t\geq 0\).
Lemma 1
(see [33])
\(\forall p\in M\), \(\sigma (t)\equiv p\), consider the subsystem \(\dot{\boldsymbol{x}}(t)=\boldsymbol{f}_{p}(\boldsymbol{x}(t))\) under Assumption 1 with the degree \(\alpha > 1\). Then the following two statements are equivalent:
-
(i)
There exists a vector \(\boldsymbol{\upsilon }_{p}=[\upsilon _{p1},\upsilon_{p2},\ldots,\upsilon_{pn}]\gg \boldsymbol{0}\) such that
$$ f_{pj}(\upsilon_{p1},\upsilon_{p2},\ldots, \upsilon_{pn})< 0,\quad \forall p \in M, j \in {\{1,2,\ldots,n\}}. $$ -
(ii)
The system \(\dot{\boldsymbol{x}}(t)=\boldsymbol{f}_{p}(\boldsymbol{x}(t))\) is globally polynomially stable for any nonnegative initial condition. In particular, every solution \(\boldsymbol{x}(t)\) of system (1) satisfies
$$ \bigl\Vert \boldsymbol{x}(t) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{p}} \leq \bigl( \bigl( \bigl\Vert \boldsymbol{x}(0) \bigr\Vert _{ \infty }^{\boldsymbol{\upsilon} _{p}}\bigr)^{1-\alpha }+(\alpha -1)\eta t \bigr) ^{-\frac{1}{\alpha -1}}, $$(2)where η is such that \(0< \eta <\min_{1 \leq j \leq n}\eta _{j} \) with \(\eta_{j}\) being the unique positive solution of the equation
$$ \frac{f_{pj}(\boldsymbol{\upsilon }_{p})}{\upsilon_{pj}}+\eta_{j}=0. $$(3)
Lemma 2
(see [27])
Assume that \(\boldsymbol{x}(t)\) is the solution of system (1), then for any \(p,q\in M\)
where \(\beta =\max_{1 \leq j \leq n} \frac{\overline{\upsilon}_{j}}{\underline{\upsilon}_{j}}\) with \(\overline{\upsilon}_{j}= \max_{p\in M}\upsilon_{pj} \), \(\underline{\upsilon}_{j}= \min_{p\in M}\upsilon_{pj}\), \(\overline{\boldsymbol{\upsilon}}=[\overline{ \upsilon}_{1},\overline{\upsilon}_{2},\ldots,\overline{\upsilon }_{n}]\) and \(\underline{\boldsymbol{\upsilon}}=[\underline{\upsilon}_{1},\underline{ \upsilon}_{2},\ldots,\underline{\upsilon}_{n}]\).
In the following theorem, for \(p\in M\), \(j\in {\{1,2,\ldots,n\}}\), we always assume that \(f_{pj}(\upsilon_{p1},\upsilon_{p2}, \ldots,\underline{ \upsilon }_{j},\ldots,\upsilon_{pn})<0\). Based on Lemma 1 and 2, we next establish a sufficient condition for asymptotic stability of system (1) and the symbols defined above continue to use. In addition, Let Q be any given closed subset of \(\mathbb{R}^{n}_{+} \setminus \{\boldsymbol{0}\}\) and define
which is used to design the switching signals in the following.
Theorem 1
For the switched nonlinear system (1), suppose that Assumption 1 holds with the degree \(\alpha >1\). If there exists a vector \(\boldsymbol{\upsilon }_{p}=[\upsilon _{p1},\upsilon_{p2},\ldots,\upsilon_{pn}]\gg \boldsymbol{0}\) for each \(p\in M\), \(j\in {\{1,2,\ldots,n\}}\), such that
Then the system (1) is asymptotically stable for any nonnegative initial condition \(\boldsymbol{x}(0)\in Q\) under MDT switching signal τ satisfying
where \(0<\eta <\min_{p\in M}\min_{1 \leq j \leq n}{\eta _{pj}}\) and \(\eta_{pj}\) is the solution of the following equation:
Proof
Let
where \(\boldsymbol{\upsilon }_{p}\gg \boldsymbol{0}\) is the vector such that \({f_{pj}}(\boldsymbol{\upsilon }_{p})<{0}\) for each \(p\in M\), \(j\in {\{1,2,\ldots,n \}}\).
Thus
Define
and
Hence, one can verify that
where \(\delta =\max_{p\in M}\max_{1 \leq j \leq n} \delta_{pj}\). This implies that \(0<\delta <1\).
Next, consider a switched sequence \(0=t_{0}< t_{1}< t_{2}<\cdots<t_{k}<t _{k+1}<\cdots\) .
From (4) and the definition of γ, for any \(\boldsymbol{x}(0)\in Q\), we have
In order to prove asymptotically stable of system (1), the proof now proceeds in two steps:
-
1.
First, we prove \(\Vert \boldsymbol{x}(t) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\leq \beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\) for all \(t\geq 0\).
-
2.
By induction, we will show for each \(l\in \mathbb{N}_{0}\), there exists a time \(t_{l}\geq 0\) such that \(\Vert \boldsymbol{x}(t) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\leq \delta^{l}\beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\underline{\boldsymbol{\upsilon }}}\) for all \(t\geq t_{l}\).
Step 1: As for every \(p\in M\), there exists a vector \(\boldsymbol{\upsilon }_{p}\gg \boldsymbol{0}\) such that \(\boldsymbol{f}_{p}(\boldsymbol{\upsilon } _{p})\ll \boldsymbol{0}\), it follows from Lemma 1 that all the subsystems are polynomially stable. Thus, for the first subsystem, we can get
where we have used (8) to get the third inequality.
Furthermore, according to Lemma 2, we arrived at
Therefore, \(\Vert \boldsymbol{x}(t_{k}) \Vert _{\infty }^{\boldsymbol{\upsilon } _{\sigma (t_{k})}}\leq \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\boldsymbol{\upsilon }_{ \sigma (0)}}\) is true for \(k=1\). Next assume for induction that \(\Vert \boldsymbol{x}(t_{k}) \Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (t_{k})}}\leq \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (0)}}\) for a given k, we will show that it holds for \(k+1\), i.e., \(\Vert \boldsymbol{x}(t_{k+1}) \Vert _{ \infty }^{\boldsymbol{\upsilon }_{\sigma (t_{k+1})}}\leq \Vert \boldsymbol{x}(0) \Vert _{ \infty }^{\boldsymbol{\upsilon }_{\sigma (0)}}\).
As the \((k+1)\)th subsystem is also polynomially stable, we have
This together with Lemma 2, we obtain
By induction, we prove that, for any \(k \in \mathbb{N}_{0}\), \(\Vert \boldsymbol{x}(t_{k}) \Vert _{\infty }^{\boldsymbol{\upsilon }_{\boldsymbol{\sigma }(t_{k})}} \leq \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\boldsymbol{\upsilon }_{\boldsymbol{\sigma }(0)}}\). Then, for any \(t\in (0,+\infty )\), assume \(t\in [t_{k},t_{k+1})\). It immediately follows from Lemma 1 that
Hence applying Lemma 2, we can get
Step 2: According to the previous Step 1, the induction by hypothesis is true for \({l=0}\). Now, assume that, for a given \(l>0\), there exists a time \(t_{l}\) such that
We will show that it is true for \(l+1\). First, we prove there exists a time \(t_{l+1}\geq t_{l}\) such that
Suppose this is not true. Then
Denote \(W(\boldsymbol{x}(t))= \Vert \boldsymbol{x}(t) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\) and let j be an index such that
Then, the upper-right Dini-derivative of \(W(\boldsymbol{x}(t))\) along the trajectories of system (1) is given by
From the definition of \(\Vert \boldsymbol{x}(t) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\), we see that
which, together with the cooperativity and homogeneity of \(\boldsymbol{f}_{ \sigma (t)}\), implies that
Let \(\theta_{1}=\min_{p\in M}\min_{1 \leq j\leq n}\frac{ f_{pj}(\upsilon_{p1},\upsilon_{p2},\ldots,\underline{\upsilon }_{j},\ldots, \upsilon_{pn})}{f_{pj}(\boldsymbol{\upsilon }_{\boldsymbol{p}})} \frac{\upsilon_{pj}}{\underline{ \upsilon }_{j}}\), then we have \(\theta_{1}>0\). Substituting (11) into (10) yields
where the third and the fourth inequality is from (9) and (7), respectively. Let \(\theta =(\delta^{l}\beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}})^{\alpha }\theta_{1}\frac{\xi }{2}\), we then have \(D^{+}W(\boldsymbol{x}(t))\leq -\theta \), which means
Thus, from (9) we obtain
Furthermore, one can verify that for \(t\geq t_{l}+\frac{\delta^{l} \beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\underline{\boldsymbol{\upsilon }}}(1-\delta )}{ \theta }\)
which contradicts (9). So there exists a time \(t_{l+1}\) such that \(\Vert \boldsymbol{x}(t) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\leq \delta^{l+1}\beta \Vert \boldsymbol{x}(0) \Vert _{ \infty }^{\underline{\boldsymbol{\upsilon }}}\).
On the other hand, since \(W(\boldsymbol{x}(t))\) is continuous on \(\mathbb{R}\), we claim that
By contradiction, suppose this is not true, then there must exist a time \(t^{\ast }\geq t_{l+1}\) such that \(W(\boldsymbol{x}(t^{\ast }))= \delta^{l+1}\beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\underline{\boldsymbol{\upsilon }}}\) and \(D^{+}W(\boldsymbol{x}(t^{\ast }))\geq 0\). As \(\boldsymbol{f}_{\sigma (t)}\) is cooperative and homogeneous, we can prove \(D^{+}W(\boldsymbol{x}(t^{\ast }))<0\). The proof is similar to the previous arguments and is thus omitted. Then we arrive at a contradiction, which implies that
Therefore, according to Steps 1 and 2, we conclude that for each \(l\in \mathbb{N}_{0}\) there exists a time \(t_{l}\) such that
Since \(\delta <1\), \(\delta^{l}\beta \Vert \boldsymbol{x}(0) \Vert _{\infty }^{ \underline{\boldsymbol{\upsilon }}}\rightarrow 0\) as \(l\rightarrow + \infty \). Thus, for any given set Q, the system (1) is asymptotically stable under MDT switching. □
3.2 Discrete-time case
Next, we consider the discrete-time case analogue of (1)
Here \(\boldsymbol{x}(k)\in \mathbb{R}^{n}\) is the state variable. \(\sigma_{k}: \mathbb{N}_{0}\rightarrow M={\{1,2,\ldots,m\}}\) is the switching signal. \(\forall k\in \mathbb{N}_{0}\), \(\sigma_{k}=p\), \(\boldsymbol{f}_{p}: \mathbb{R} ^{n}\rightarrow \mathbb{R}^{n}\) is continuous on \(\mathbb{R}^{n} \backslash \{\boldsymbol{0}\}\), which satisfies the following assumption.
Assumption 2
\(\forall p\in M\), \(\boldsymbol{f}_{p}\) is homogeneous of degree α and order-preserving on \(\mathbb{R}^{n}_{+}\).
Remark 2
For every \(p\in M\), as \(\boldsymbol{f}_{p}\) is order-preserving, one can verify that the system (12) is positive for any nonnegative condition under arbitrarily switching laws. That is, if \(\boldsymbol{x}(0)\geq \boldsymbol{0}\) then \(\boldsymbol{x}(k)\in \mathbb{R}^{n}_{+} \) for all \(k\in \mathbb{N}_{0}\).
Based on Lemma 2, we present and prove the main result of this section. In addition, Let \(R={\{\boldsymbol{x}\in \mathbb{R}^{n}_{+}| \Vert \boldsymbol{x}(0) \Vert _{\infty }^{\underline{\boldsymbol{\upsilon }}} \leq 1 }\}\), which is used in Theorem 2.
Theorem 2
Consider the system (12) with \(\alpha \geq 1\). Suppose that Assumption 2 holds. If for every \(p\in M\), there exists a vector \(\boldsymbol{\upsilon }_{p}\gg \boldsymbol{0}\) such that
Then the switched nonlinear system (12) is exponentially stable for any initial condition \(\boldsymbol{x}(0)\in R\) under the MDT switching signal τ satisfying
In particular, every solution \(\boldsymbol{x}(k)\) of system (12) satisfies
where \(\omega =\max_{p\in M}\max_{1 \leq j \leq n} \omega_{pj}\) with \(\omega_{pj}\) being the solution to the equation
Proof
It follows from (13) that
Consider a switched sequence \(0=k_{0}< k_{1}<\cdots<k_{n}<\cdots\) , which is a sub-sequence of \(\mathbb{N}_{0}\). It immediately follows that
Using Lemma 2 for any \(\boldsymbol{x}(0)\in R\), we have
In the following, we fix a nonnegative solution \(\boldsymbol{x}(k)\) of system (12). Then the proof now proceeds in two steps.
-
1:
First, we show that, for an arbitrary interval \([k_{l},k_{l+1})\), the following conditions hold:
$$\begin{aligned}& \bigl\Vert \boldsymbol{x}(k_{l}) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (k_{l})}}\leq \bigl\Vert \boldsymbol{x}(k_{0}) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (k_{0})}}\leq 1, \end{aligned}$$(15)$$\begin{aligned}& \bigl\Vert \boldsymbol{x}(k) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (k_{l})}} \leq \bigl\Vert \boldsymbol{x}(k_{l}) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (k_{l})}} \omega^{k-k_{l}}, \quad \forall k\in [k_{l},k_{l+1}). \end{aligned}$$(16) -
2:
Then we prove the solution of system (12) is exponentially stable. That is, there exist two constants \(a>0\) and \(0< b<1\) such that
$$ \bigl\Vert \boldsymbol{x}(k) \bigr\Vert _{\infty }^{\boldsymbol{\upsilon }_{\sigma (k)}}\leq ab^{k} \bigl\Vert \boldsymbol{x}(0) \bigr\Vert _{\infty }^{\underline{\boldsymbol{\upsilon }}}. $$
Step 1: Consider the first interval \([k_{0},k_{1})\) on which \(\sigma (k)=\sigma (k_{0})\). Next we prove that for any \(k\in [k_{0},k _{1})\)
Obviously, it holds true for \(k=k_{0}\). Assume for induction that (17) holds for all k up to some \(\overline{k} \in [k_{0},k_{1})\). Thus
This means for each \(j\in {\{1,2,\ldots,n\}}\)
On the other hand, as \(\boldsymbol{f}_{\sigma (k_{0})}\) is order-preserving and homogeneous of degree α on \(\mathbb{R}^{n}_{+}\), then, for any \(j\in {\{1,2,\ldots,n\}}\), we have
where the last inequality is from (14) and \(0<\omega <1\). Furthermore, we can get
which implies that (17) is true for \(k=\overline{k}+1\). Thus, by induction, we conclude that (17) holds for all \(k\in [k_{0}, k_{1})\). It immediately follows that
where the second inequality is from the inequality
Then using Lemma 2, one can verify that
From (17) and (19), we claim that (15) and (16) hold for the first interval \([k_{0},k_{1})\). By induction, we assume that (15) and (16) are true for the lth interval. Then we can use similar arguments to the proofs of (17) and (19) to show that (15) and (16) also hold for the \((l+1)\)th interval.
By now, we show that (15) and (16) hold for arbitrarily interval of any fixed switching sequence.
Step 2: \(\forall k\in \mathbb{N}_{0}\), suppose that \(k\in [k_{l}, k _{l+1})\). Then we have
Let
which can easily be verified that \(a>0\) and \(0< b<1\) from the fact that \(\tau >-\frac{\ln \beta }{\ln \omega }\).
Therefore, system (12) is exponentially stable for the initial condition \(\boldsymbol{x}(0)\in R\). □
4 Numerical simulation
Consider the switched nonlinear system consisting of two subsystems given by
where
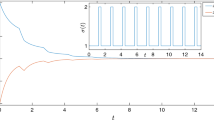
It is easy to verify that \(\boldsymbol{f}_{1}\), \(\boldsymbol{f}_{2}\) satisfy the conditions of Theorem 1. Let \(Q=\{x\in \mathbb{R}^{n}_{+}| x_{i} \geq 0.5, i=1,2\}\). It follows from Theorem 1 that the corresponding switched nonlinear system is asymptotically stable under MDT switching \(\tau \geq 1.67\), where \(\overline{\boldsymbol{\upsilon }}=[2,3]\), \(\underline{\boldsymbol{\upsilon }}=[2,2]\), \(\beta =\frac{3}{2}\), \(\eta =1.2\) and \(\gamma =0.25\). From Fig. 1, we see that \(\boldsymbol{x}(t)\) converges to origin. This agrees with the implication of Theorem 1.

The simulation results of the actual decay rate with the initial condition \(\boldsymbol{x}(0)=[1.2,0.6]^{T}\) and the MDT \(\tau =2\)
5 Conclusion
In this paper, we study the stability of SPCHSs. For the continuous-time SPCHSs, we present a sufficient condition for asymptotic stability of SPCHSs with the degree \(\alpha >1\) by using the MDT approach. Then, for the discrete-time case, a sufficient condition is also obtained for exponential stability of SPNSs with \(\alpha \geq 1\) under MDT switching.
References
Bohner, M., Li, T.: Oscillation of second-order p-Laplace dynamic equations with a nonpositive neutral coefficient. Appl. Math. Lett. 37, 72–76 (2014)
Li, T., Rogovchenko, Yu.V.: Asymptotic behavior of higher-order quasilinear neutral differential equations. Abstr. Appl. Anal. 2014, 395368 (2014)
Li, T., Rogovchenko, Yu.V.: Oscillation of second-order neutral differential equations. Math. Nachr. 288(10), 1150–1162 (2015)
Qi, J., Sun, Y.: Global exponential stability of certain switched systems with time-varying delays. Appl. Math. Lett. 26(7), 760–765 (2013)
Ramakrishnan, K., Ray, G.: Robust stability criteria for a class of uncertain discrete-time systems with time-varying delay. Appl. Math. Model. 37(3), 1468–1479 (2013)
Li, T., Rogovchenko, Yu.V.: Oscillation criteria for even-order neutral differential equations. Appl. Math. Lett. 61, 35–41 (2016)
Li, T., Rogovchenko, Yu.V.: Oscillation criteria for second-order superlinear Emden-Fowler neutral differential equations. Monatshefte Math. 184(3), 489–500 (2017)
Shah, R., Li, T.: The thermal and laminar boundary layer flow over prolate and oblate spheroids. Int. J. Heat Mass Transf. 121, 607–619 (2018)
Hofbauer, J., Sigmund, K.: Evolutionary Games and Population Dynamics. Cambridge University Press, Cambridge (1998)
Viel, F., Jadot, F., Bastin, G.: Global stabilization of exothermic chemical reactors under input constraints. Automatica 33(8), 1437–1448 (1997)
Liu, X.: Constrained control of positive systems with delays. IEEE Trans. Autom. Control 54(7), 1596–1600 (2009)
Li, P., Lam, J., Shu, Z.: \(\mathrm{H}_{\infty}\) positive filtering for positive linear discrete-time systems: an augmentation approach. IEEE Trans. Autom. Control 55(10), 2337–2342 (2010)
Feyzmahdavian, H.R., Charalambous, T., Johansson, M.: Exponential stability of homogeneous positive systems of degree one with time-varying delays. IEEE Trans. Autom. Control 59(6), 1594–1599 (2014)
Feyzmahdavian, H.R., Charalambous, T., Johansson, M.: Asymptotic stability and decay rates of homogeneous positive systems with bounded and unbounded delays. SIAM J. Control Optim. 52, 2623–2650 (2014)
Sun, Y., Meng, F.: Reachable set estimation for a class of nonlinear time-varying systems. Complexity (2017). https://doi.org/10.1155/2017/5876371
Rami, M.A.: Stability analysis for continuous-time positive systems with time-varying delays. IEEE Trans. Autom. Control 55(4), 1024–1028 (2010)
Ngoc, P.H.A., Naito, T., Shin, J.S., Murakami, S.: On stability and robust control stability of positive linear Volterra equations. SIAM J. Control Optim. 47(2), 975–996 (2008)
Knorn, F., Mason, O., Shorten, R.: On linear co-positive Lyapunov functions for sets of linear positive systems. Automatica 45(8), 1943–1947 (2009)
Sun, Y., Wu, Z.: On the existence of linear copositive Lyapunov functions for 3-dimensional switched positive linear systems. J. Franklin Inst. 350(6), 1379–1387 (2013)
Haddad, W.M., Chellaboina, V.: Stability theory for nonnegative and compartmental dynamical systems with time delay. Syst. Control Lett. 51(5), 355–361 (2004)
Ngoc, P.H.A.: Stability of positive differential systems with delays. IEEE Trans. Autom. Control 58(1), 203–209 (2013)
Zhu, S., Li, Z., Zhang, C.: Exponential stability analysis for positive systems with delays. IET Control Theory Appl. 6(6), 761–767 (2012)
Mason, O., Verwoerd, M., Johansson, M.: Observations on the stability properties of cooperative systems. Syst. Control Lett. 58(6), 461–467 (2009)
Li, Y., Sun, Y., Meng, F.: New criteria for exponential stability of switched time-varying systems with delays and nonlinear disturbances. Nonlinear Anal. Hybrid Syst. 26, 284–291 (2017)
Li, Y., Sun, Y., Meng, F., Tian, Y.: Exponential stabilization of switched time-varying systems with delays and disturbances. Appl. Math. Comput. 324, 131–140 (2018)
Sun, Y.: Stabilization of switched systems with nonlinear impulse effects and disturbances. IEEE Trans. Autom. Control 56(11), 2739–2743 (2011)
Dong, J.: Stability of switched positive nonlinear systems. Int. J. Robust Nonlinear Control 26(14), 3118–3129 (2016)
Fornasini, E., Valcher, M.E.: Linear copositive Lyapunov functions for continuous-time positive switched systems. IEEE Trans. Autom. Control 55(8), 1933–1937 (2010)
Sun, Y.: Stability analysis of positive switched systems via joint linear copositive Lyapunov functions. Nonlinear Anal. Hybrid Syst. 19, 146–152 (2016)
Gurvits, L., Shorten, R., Mason, O.: On the stability of switched positive linear systems. IEEE Trans. Autom. Control 52(6), 1099–1103 (2007)
Sun, Y., Tian, Y., Xie, X.: Stabilization of positive switched linear systems and its application in consensus of multi-agent systems. IEEE Trans. Autom. Control 62(12), 6608–6613 (2017)
Mason, O., Shorten, R.: On linear copositive Lyapunov functions and the stability of switched positive linear systems. IEEE Trans. Autom. Control 52(7), 1346–1349 (2007)
Dong, J.: On the decay rates of homogeneous positive systems of any degree with time-varying delays. IEEE Trans. Autom. Control 60(11), 2983–2988 (2015)
Smith, H.: Monotone Dynamical Systems: An Introduction to the Theory of Competitive and Cooperative Systems. Am. Math. Soc., Providence (1995)
Acknowledgements
This work is supported by the Key Program of National Natural Science Foundation of China (No. 61533011) and the National Natural Science Foundation of China (No. 61473133).
Author information
Authors and Affiliations
Contributions
The authors declare that the work was realized in collaboration with the same responsibility. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Tian, D., Liu, S. Stability analysis for a class of switched positive nonlinear systems under dwell-time constraint. Adv Differ Equ 2018, 95 (2018). https://doi.org/10.1186/s13662-018-1547-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1547-5