
Abstract
Background
Musculoskeletal disorders can contribute to injurious falls and incur significant societal and healthcare burdens. Identification of fallers from non-fallers through wearable-based gait analysis can facilitate timely intervention to assist mobility and prevent falls whilst improving care and attention for high fall-risk patients. In this study, we use wearable sensor-based gait analysis to introduce a novel variable to assess walking stability in fallers and non-fallers – the Walking Orientation Randomness Metric. The WORM score quantifies the stability, or ‘figure-of-eight’ motion of a subject’s trunk during walking as an indicator of a falls-predictive (pathological) gait.
Methods
WORM is calculated as the ‘figure-of-eight’ oscillation mapped out in the transverse-plane by the upper body’s centre-point during a walking bout. A sample of patients presenting to the Prince of Wales Hospital (Sydney, Australia) with a primary diagnosis of “falls for investigation” and age-matched healthy controls (non-fallers) from the community were recruited. Participants were fitted at the sternal angle with the wearable accelerometer, MetaMotionC (Mbientlab Inc., USA) and walked unobserved (at self-selected pace) for 5-50 m along an obstacle-free, carpeted hospital corridor.
Results
Participants comprised of 16 fallers (mean age: 70 + 17) and 16 non-fallers (mean age: 70 + 9) based on a recent fall(s) history. The (median) WORM score was 17-fold higher (p < 0.001) in fallers (3.64 cm) compared to non-fallers (0.21 cm). ROC curve analyses demonstrate WORM can discriminate fallers from non-fallers (AUC = 0.97). Diagnostic analyses (cut-off > 0.51 cm) show high sensitivity (88%) and specificity (94%).
Conclusion
In this pilot study we have introduced the WORM score, demonstrating its discriminative performance in a preliminary sample size of 16 fallers. WORM is a novel gait metric assessing walking stability as measured by truncal way during ambulation and shows promise for objective and clinical evaluation of fallers.
Similar content being viewed by others

Background
Although quantification is difficult, changes in gait patterns are well-established and recognised in a variety of pathological conditions [1,2,3,4]. Traditionally gait analyses are performed in two distinct settings, each with its own benefits and disadvantages. The first is the laboratory setting which is typically objective with high accuracy but may be limited by expense, time consumption, and specialised material [5,6,7,8]. Further, with such synthetic testing conditions there is speculation that patterns may not be reflective of true everyday functions. In contrast the clinical setting (health care professional observation) may allow the observer to match one of several pathognomonic gait patterns, such as a Trendelenburg gait [9, 10], or neurogenic claudicant gait [11] to specific pathologies but may be limited by the degree of finite data able to be collected and the time for assessing the subject.
Inertial measurement units (IMU’s), commonly known as ‘wearable devices’ (wearables), contain various microelectromechanical sensors (MEMS) including accelerometers, gyroscopes and magnetometers. They have recently appeared as an alternative to the existing methods of gait assessment in the clinical setting [12, 13]. They are small, cheap, and marry the convenience of clinical assessment with the accuracy and objectivity of laboratory gait assessment. Additionally, unlike both existing methods, wearables provide the ability to observe walking in the absence of an observer, such as a clinician, eliminating the presence of any ‘white coat effect’ in a laboratory or when studied by a clinician [14]. Greater conscious control of walking can result in a representation of ‘best performance’ when observed (rather than ‘free-living’ gait) with overestimated cadence and underestimated gait variability [15].
Current commercial wearables can accurately measure numerous gait metrics including gait velocity, stride length, stride time, cadence, and step count [12]. The latest generation of devices are now able to detect more nuanced features of the gait cycle including aberrant (variable or asymmetric) movements, exaggerated axial sway or range of joint motion [13]. Despite this, integration to the health setting has been limited, though potential utility is great. In addition to assessing disability and post-intervention recovery, wearable devices may also be useful in the identification of falls-risk patients [16].
Falls incur a significant disease burden annually, resulting in 695,771 deaths and a vast 35,940,787 disability-adjusted life years (DALYs) lost globally during 2017 [17]. Current falls-risk stratification strategies in clinical settings rely on structured questionnaires based on well-established risk factors including falls history, sedative medications, altered psychological states and gait or balance disorders. However, clinical accuracy in identifying patients at high risk of falls has been found to be limited [18], with Chapman et al’s (2011) assessment of four common tools (including Morse Fall Scale and Hendrich II Fall Risk Model) demonstrating sensitivity to range from 57.1–100% and specificity from 24.9–69.3% [19]. There is a clear need to implement more accurate falls prediction and prevention strategies, particularly leveraging recent wearable sensor capabilities.
Falls may be caused by an interplay between (patient-related) intrinsic and (environmental) extrinsic risk factors [20,21,22,23]. Despite multiple causes, balance and gait abnormalities have been consistently identified in the literature as one of the primary causes [21, 24,25,26]. Objective studies of fallers’ gait has demonstrated spatiotemporal alterations, with some of these variables such as gait velocity, cadence and stride length further explored for falls-classification [27, 28]. One hypothesis is that balance dysfunction and poor postural control account for inconsistent stepping patterns and therefore drive a greater gait variability [29, 30]. As a consequence the stride-to-stride variability of gait parameters have also been found to be useful [31], despite differing measures of standard deviation [32] or coefficient of variation being used to examine fall related gait behaviour [33, 34].
Previous wearable accelerometry studies of walking stability in fallers have assessed the smoothness and rhythm (variability) of acceleration patterns with the Lyapunov exponent [35, 36], autocorrelation coefficient [34, 37] and harmonic ratio [34, 38, 39]. Previous authors have typically considered balance in the mediolateral, vertical, and anteroposterior planes [34, 39,40,41]. Trunk-based sensor-placement has been widely employed as it is most proximal to the centre of mass (COM) [33, 41, 42]. Whilst most studies employed placement at the lumbar vertebrae [33, 39, 42], some have used chest-based sensor placement [41, 43].
The COM is calculated to lie a few centimetres anterior to the lumbosacral joint [44], with most wearable sensor-based studies analysing COM motion opting for sensor-placement along the lumbar vertebrae [33, 39, 42]. However, these lumbosacral approximations do not entirely reflect the movement of each individual body segment of ambulation (especially the upper limbs) which can largely influence COM motion and walking stability [45, 46]. We hypothesise that sensor placement in the midline (anterior) chest wall captures truncal and limb motion, providing a holistic measure of walking stability.
Indeed, chest-based sensor placement has been validated in the literature to provide reliable and accurate measurement of postural [41, 47, 48] and spatiotemporal gait parameters [43, 49]. Chest-based sensor placement has also been previously used to measure truncal sway and assess ataxic gait [50, 51]. Previous studies have demonstrated fallers experience greater displacements and velocities of truncal sway in the anteroposterior and mediolateral planes [52]. However, an integrative approach combining accelerometric, gyroscopic and magnetometry inputs to measure movement of the trunk’s centre-point in the transverse plane (i.e path lengths) has previously not been explored.
This technical description therefore aims to provide a standardised unit to assess walking stability and discriminate between fallers and non-fallers. Using a chest-based wearable device, we introduce a novel variable that quantifies the transverse-plane motion of a subject’s trunk during walking – hereby referred to as the Walking Orientation Randomness Metric (WORM).
Methods
Walking orientation randomness metric (WORM)
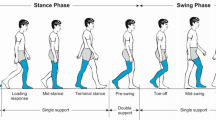
During walking, the summative motion of individual joint segments accelerates the trunk forwards of the base of support. With each step, the trunk also oscillates side-to-side (about 46 mm), over each leg during its stance phase [53, 54]. Subtracting the average forward velocity of the body, shows the subjects’ trunk to therefore oscillate rhythmically left-right [45]. This lateral truncal displacement is pertinent from a clinical standpoint as lateral stability is ultimately compromised in many neurological and orthopaedic pathologies [55].
To assess the stability of this inverted pendulum-like motion during walking [56,57,58], the WORM score measures the ‘figure-of-eight’ motion of the upper body derived from a chest-based wearable device as shown in Fig. 1. The single-point IMU provides real-time quaternions that are subsequently converted to Euler angles. These three-dimensional angles are then used to calculate the trajectory of the subject’s truncal sway (Eq. 1–3). We first calculate the point pt at time step t from the orientation of the body with respect the world frame, \({{{}{}^{\mathrm{W}}\mathrm{R}}_{\mathrm{t}}^{\mathrm{B}}}\). The body orientation, \({{}{}^{\mathrm{W}}\mathrm{R}}^{\mathrm{B}}\), is obtained from the orientation measured by the single point IMU, \({{}{}^{\mathrm{W}}\overset{\smile }{\mathrm{R}}}_{\mathrm{t}}^{\mathrm{S}}\), adjusted by a fixed sensor-to-body rotational offset, \({{}{}^{\mathrm{B}}\mathrm{R}}_0^{\mathrm{S}}\), as shown in Eq. 1. The sensor-to-body offset, \({{}{}^{\mathrm{B}}\mathrm{R}}_0^{\mathrm{S}}\), was calculated by assuming an upright pose (i.e., \({{}{}^{\mathrm{W}}\mathrm{R}}_0^{\mathrm{B}}={\mathrm{I}}_{3\mathrm{x}3}\)) at t = 0 as shown in Eq. 2. Finally, point pt, which is effectively the x and y coordinates of the body z axis with centre at the origin, is calculated using Eq. 3 (the three-dimensional body orientation is projected in two-dimensions, the transverse plane). From point pt, WORMdist is calculated as the distance travelled in the transverse plane travel by pt, (the length of the blue outline) measuring truncal motion during the walking bout (Fig. 1).

Diagrammatic model of human body during walking. WORM score calculation reflects truncal motion as a measure of walking (in)stability. WORMdist is calculated as the distance travelled in the transverse plane travel by p, (the length of the blue outline) measuring truncal motion during the walking bout. IMU = Inertial Measurement Unit, WORM = Walking Orientation Randomness Metric
This WORMdist output is subsequently averaged to time walked and to distance walked to derive the final WORM Score (hereafter referred to simply as WORM). Thus, WORM measures the “figure-of-eight” motion of the trunk in the transverse plane, averaged per metre and per second of walking.
Study participants
The participants of this study were a sample of patients presenting to the Prince of Wales Hospital (Sydney, Australia) with a primary diagnosis of “falls for investigation” in July–August 2020. During their acute hospital admission, study parameters and risks were discussed, and consent obtained. Participants lacking the ability to walk any distance without a form of support (walking stick or frame) were excluded. Participants with any form of orthopaedic injury following their fall (for instance neck of femur fracture), that may exacerbate their gait dysfunction were also excluded. Included patients underwent a semi-structured interview to obtain demographic information and assess eligibility. To be included in the “fallers” group, the fall must have been unrelated to a medication event and the patient must have intact binocular vision without concurrent visual pathologies. Age-matched “non-faller” controls were recruited from the community following a similar semi-structured interview. Ethics for this study was obtained from the South Eastern Sydney Local Health District, with reference code 17/184.
Study design
A retrospective study design was used to group fallers, based on recent history of falls (in the week of community ambulation preceding admission). A retrospective study design was opted for this pilot study due to the ethical concerns and technical difficulties of prospective long term community follow-up of ‘potential fallers’. Moreover, categorisation of faller status based on recent history of falls is reasonably justified by the fact that history of previous falls strongly predicts future falls [20, 21, 59]. The authors of the study believed that, assuming no major injuries had been sustained from the high fall population that their inpatient gait patterns were reasonably reflective of their pre-fall pattern of ambulation. Controls were included to the non-fallers group, based on no previous history of falls and age-matching with participants of the fallers group.
Sample size calculations
Required sample size of 14 participants per group was calculated using the GPower 3.0 program to achieve at least 80% power given an effect size of 1. A recruitment target of at least 15 participants was therefore set for this preliminary study to account for any potential data losses.
Procedure
Prior to the walk, participants were fitted at the sternal angle (Supplementary Materials - Appendix B) with an inertial measurement unit: the MetaMotion© (MMC) manufactured by Mbientlab Inc. (California, USA). In addition, patients wore a safety belt such that any fall during the subsequent walking event could be prevented by the 3 investigators who were in close proximity to the patient walking for safety. Following a short initial pause to orient the MMC device, participants walked a self-selected distance (5–50 m) with (mean +/− standard deviation) distance walked by fallers being 17 +/− 18 m whilst non-fallers walked 49 +/− 2.8 m. Participants walked as far as they could consent to walk safely, at a self-selected pace along a 50 m unobstructed pathway on level ground. Trials were discarded if the patient did (or could) not pause to orient the device, walk more than 5 m or required walking assistance during the bout.
Data processing
The MMC is a wearable sensor that involves data fusion (using a Kalman filter) from a 16 bit 100 Hz triaxial accelerometer, a 16 bit, 100 Hz triaxial gyroscope and a 0.3 μT, 25 Hz triaxial magnetometer. Captured data is stored as a matrix of the values corresponding to each time point (100 captures per second) for up to 20 min of walking. For the purposes of this study, the MMC device recorded the entire walking trial, and the data captured was transmitted via Bluetooth™ to an Android™ smartphone running the IMUGait Recorder application developed for this study (Supplementary Materials - Appendix B). The IMUGait Recorder application then uploaded the raw data to a centralised database where a modified version of Czech et al’s open-source python program (IMUGaitPy program) was used to process the gait metrics for that walking trial [60], and visualise the WORM Score (Supplementary Materials - Appendix C). The MMC was used to measure truncal sway, and IMUGaitPy program was then used to calculate the Walking Orientation Randomness Metric (WORM) score.
Statistical analysis
Data analyses were performed using Prism 9 (GraphPad Software). Descriptive statistics were calculated for demographic variables including; age, gender, presence of diabetes and smoking. Spatiotemporal parameters of gait were calculated, and step (rather than stride) measurements chosen for calculations of asymmetry and variation due to greater reliability [61]. Differences between fallers and non-fallers were calculated using unpaired two-tailed t-test. Welch’s correction was applied for variables with unequal variance and Mann Whitney U test used where non-normal distribution was present. Discriminative ability was assessed using the area under the curve values of receiver operating characteristic curves for each gait metric. Accuracy values were interpreted as follows: 0.5 = test due to chance, 0.7–0.9 = moderate accuracy, 0.9–1.0 = very accurate, 1.0 = perfect test. Normality was assessed using Shapiro-Wilk tests and inspection of histograms. Statistical significance was considered with a p-value < 0.05.
Results
Participant demographics
16 participants recruited as ‘fallers’ had a range of comorbidities including delirium, hip/knee osteoarthritis, lumbar radiculopathy, scoliosis, vestibular imbalance, cervical myelopathy, foot-drop and stroke-related hemi-paresis. The 16 control participants recruited as ‘non-fallers’ also had various comorbidities consistent with their age such as osteoarthritis of the spine and lower extremities, however had no history of falls. Demographic variables including age, gender ratios, smoking and diabetic status, body mass indices and height for these participants were not significantly different between fallers and non-fallers, with the exception of weight and daily step count (Table 1).
Spatiotemporal gait parameters
9 gait characteristics were measured across the four main gait domains of spatial, rhythm/temporal, asymmetry and variation metrics. 8 of these were significantly different between fallers and non-fallers (Table 2), and 7 of these remain significant following Bonferroni’s corrections (p = 0.05/13 = 0.0038) for multiple testing. Fallers have a typical gait pattern of significantly lower gait velocity (− 43%), step length (− 27%) and cadence (− 23%) significantly increased parameters include step time (+ 37%), step time asymmetry (+ 305%) and variability in terms of gait velocity (+ 114%), step time (+ 150%) and step length (+ 128%). Asymmetry in step length was not found to be significantly different (p = 0.080) in fallers.
The ability of these spatiotemporal parameters of gait to differentiate between fallers and non-fallers was assessed by statistically significant area under the curve (AUC) values of receiver operating characteristic (ROC) curves (Table 3). Good accuracy was found for most gait parameters with the highest accuracy found in gait velocity (AUC = 0.91), step time (AUC = 0.94), asymmetry in step time (AUC = 0.90), and variation in gait velocity (AUC = 0.90).
WORM scores
Walking stability according to WORM scores (cm/s) was significantly different (p < 0.001), being 17-fold higher (mean ± standard deviation) in fallers (3.64 ± 3.90) compared to non-fallers (0.21 ± 0.17). These differences in WORM scores (as seen in Tables 2 and 3) show high accuracy (AUC = 0.97) in differentiating fallers from non-fallers with a sensitivity of 87.50% and specificity of 93.75% when selecting the cut-off (WORM > 0.51 cm) with highest likelihood ratio (14.00).
Discussion
Through wearable accelerometry we have identified the relevant gait variables with high discriminative power in classifying fallers from non-fallers: gait velocity, step time, gait asymmetry (in step time) and gait variability (in gait velocity). Our identification of significantly different gait parameters in fallers largely aligns with existing findings in literature such as reduced walking speed [27, 28, 62], cadence [28, 62] and stride/step length [27, 62] with greater step time (in double support) [28], gait variability (in swing time) [28] and gait asymmetry [39, 62]. These gait deficits in the fallers group could be attributable to dysfunction of muscle strength, balance, proprioceptive physiology and/or disuse-related [63]. In this pilot study we have also introduced the WORM score, demonstrating its discriminative performance in a preliminary sample size of 16 fallers, affirming clinical utility for further research.
The novel gait metric investigated in the present study (WORM), assesses walking stability as measured by truncal motion in the transverse-plane during walking. The rationale for WORM stems from existing theories surrounding centre of mass (COM) motion [64,65,66] during ambulation, when considering the translation of the body system as a whole. Previous clinical studies and mathematical modelling suggests COM motion to undergo a closed figure-of-eight path (a ‘bow-tie’ shape), upwardly concaved in the frontal plane [65, 67,68,69]. Measurement of COM trajectory (especially its lateral motion) is thus clinically relevant to understanding and predicting falls, as they mostly occur towards the lateral direction [55].
WORM’s methodology provides an alternative to measuring ‘COM’ at the lower lumbar vertebrae. We believe a chest-based sensor placement incorporates compensatory truncal inclinations and/or upper limb motions (that seek to offset pathological lower limb biomechanics) in assessing walking stability. Greater truncal motion due to these compensatory gait alterations likely enabled discrimination of fallers from non-fallers via WORM in the present study. Our finding aligns with consensus in literature regarding truncal sway measurements offering useful information to distinguish gait abnormalities and fallers [70, 71].
The WORM calculation (averaged as mean per metre and per second of walking) was justified by Fukuchi et al’s recommendations when analysing pathological gait patterns, to consider the confounding effects of higher gait speeds increasing the amplitudes of spatiotemporal parameters, joint kinematics, joint kinetics, and ground reaction forces [72]. This is likely due to velocity-related changes in the total length of the figure-of-eight path due to shortening of its lateral oscillations [45]. As manifested in the present study, the relationship between truncal sway and gait velocity in older adults offers insight into differences between fallers and non-fallers [70]. Although truncal sway decreases with increased gait velocity in clinically normal gait according to Tesio et al. 2019 [45], this relationship likely ceases to exist in pathological gait thereby accounting for greater WORM scores in fallers.
The proposed method presents an objective, unsupervised and unobtrusive method of point-of-care testing to assess walking stability and balance in both clinical and community settings. The WORM score provides clinicians, patients and carers with a quantification of walking instability serving as an accurate and sensitive biomarker for falls-risk. WORM may guide falls-preventative interventions in the elderly such as mobility assistance (walking aids), home modifications [73], alterations to medication regiments [74, 75], or physical therapy [76]. We have reported WORM scores for non-fallers versus fallers, however the intermediate scores between these 2 points may provide further insight into fall-risk stratification to guide these interventions. WORM may also serve clinical utility in minimising post-intervention falls in the community for example when planning safe discharge, rehabilitation and home care [77].
A limitation of the present study would be the classification of faller status based on retrospective history (albeit recent in the preceding week). Although, classification of faller status based on retrospective history can be justified by the fact prior history of falls strongly predicts future falls [20, 21, 59], future studies in prospective fallers may enable confirmation of ‘real-world’ falls-prediction capabilities in community and at-home settings. Despite promising findings in this preliminary study, the sample size of 32 participants is a limitation. Moreover, accuracy and re-test reliability is unknown without future validation in larger external datasets. Moreover, challenges commonly faced by medical wearable devices such as battery life and missed communication (sensor failure and consequent data loss for one patient), were also experienced in the present study [78].
We have reported on a single aspect of walking instability (velocity of truncal sway) being sensitive and specific in our sample population of fallers. However, future research may consider the utility of path lengths and area of truncal sway. The discriminative performance of these WORM scores may vary among pathologies. Other avenues of research include: defining normative values of WORM depending on age and sex, leveraging artificial intelligence classification techniques (such as machine learning, deep neural learning) in future analyses and validation in more specific pathological populations (knee/hip osteoarthritis, multiple sclerosis, Parkinson’s disease).
Conclusion
In this pilot study we have also introduced the WORM score, demonstrating its discriminative performance in distinguishing high-risk falls patients from an age-matched cohort of non-fallers. WORM is a novel gait metric assessing walking stability as measured by truncal motion during ambulation and shows promise for falls prediction.
Availability of data and materials
The datasets generated during and analysed during the current study are not publicly available due to authors’ ownership of intellectual property rights but are available from the corresponding author on reasonable request.
References
Kirtley C. Clinical gait analysis: theory and practice. Elsevier Health Sci. 2006.
Mobbs RJ. Gait velocity (walking speed) is an indicator of spine health, and objective measure of pre and post intervention recovery for spine care providers. J Spine Surg. 2020;6(2):353.
Mobbs RJ, Betteridge C. Daily step count and walking speed as general measures of patient wellbeing. J Spine Surg. 2020;6(3):635.
Ebersbach G, Moreau C, Gandor F, Defebvre L, Devos D. Clinical syndromes: parkinsonian gait. Mov Disord. 2013;28(11):1552–9.
Yavuzer G. Three-dimensional quantitative gait analysis. Acta Orthop Traumatol Turc. 2009;43(2):94–101.
Cappozzo A. Gait analysis methodology. Hum Mov Sci. 1984;3(1–2):27–50.
Mirelman A, Shema S, Maidan I, Hausdorff JM. Gait Handb Clin Neurol. 2018;159:119–34.
Brodie MA, Beijer TR, Canning CG, Lord SR. Head and pelvis stride-to-stride oscillations in gait: validation and interpretation of measurements from wearable accelerometers. Physiol Meas. 2015;36(5):857.
Toro B, Nester C, Farren P. A review of observational gait assessment in clinical practice. Physiother Theory Pract. 2003;19(3):137–49.
Gor-García-Fogeda MD, de la Cuerda RC, Tejada MC, Alguacil-Diego IM, Molina-Rueda F. Observational gait assessments in people with neurological disorders: a systematic review. Arch Phys Med Rehabil. 2016;97(1):131–40.
Perring J, Mobbs R, Betteridge C. Analysis of patterns of gait deterioration in patients with lumbar spinal stenosis. World Neurosurg. 2020;141:e55–e9.
Valenti G, Bonomi AG, Westerterp KR. Walking as a contributor to physical activity in healthy older adults: 2 week longitudinal study using accelerometry and the doubly labeled water method. JMIR mHealth and uHealth. 2016;4(2):e5445.
Tao W, Liu T, Zheng R, Feng H. Gait analysis using wearable sensors. Sensors. 2012;12(2):2255–83.
Larkin K, Schauss S, Elnicki D, Goodie J. Detecting white coat and reverse white coat effects in clinic settings using measures of blood pressure habituation in the clinic and patient self-monitoring of blood pressure. J Hum Hypertens. 2007;21(7):516–24.
Brodie MA, Coppens MJ, Lord SR, Lovell NH, Gschwind YJ, Redmond SJ, et al. Wearable pendant device monitoring using new wavelet-based methods shows daily life and laboratory gaits are different. Med Biol Eng Comput. 2016;54(4):663–74.
Sejdić E, Godfrey A, McIlroy W, Montero-Odasso M. Engineering human gait and the potential role of wearable sensors to monitor falls. Falls and Cognition in Older Persons: Springer. 2020:401–26.
James SL, Lucchesi LR, Bisignano C, Castle CD, Dingels ZV, Fox JT, et al. The global burden of falls: global, regional and national estimates of morbidity and mortality from the global burden of disease study 2017. Injury prevention. 2020;26(Supp 1):i3–i11.
Kim EAN, Mordiffi SZ, Bee WH, Devi K, Evans D. Evaluation of three fall-risk assessment tools in an acute care setting. J Adv Nurs. 2007;60(4):427–35.
Chapman J, Bachand D, Hyrkäs K. Testing the sensitivity, specificity and feasibility of four falls risk assessment tools in a clinical setting. J Nurs Manag. 2011;19(1):133–42.
Summary of the updated American Geriatrics Society/British geriatrics society clinical practice guideline for prevention of falls in older persons. J Am Geriatr Soc. 2011;59(1):148–57.
Ambrose AF, Paul G, Hausdorff JM. Risk factors for falls among older adults: a review of the literature. Maturitas. 2013;75(1):51–61.
Sartini M, Cristina ML, Spagnolo AM, Cremonesi P, Costaguta C, Monacelli F, et al. The epidemiology of domestic injurious falls in a community dwelling elderly population: an outgrowing economic burden. Eur J Pub Health. 2010;20(5):604–6.
Axer H, Axer M, Sauer H, Witte OW, Hagemann G. Falls and gait disorders in geriatric neurology. Clin Neurol Neurosurg. 2010;112(4):265–74.
Tinetti ME, Speechley M, Ginter SF. Risk factors for falls among elderly persons living in the community. N Engl J Med. 1988;319(26):1701–7.
Rubenstein LZ, Josephson KR, Robbins AS. Falls in the nursing home. Ann Intern Med. 1994;121(6):442–51.
Deandrea S, Lucenteforte E, Bravi F, Foschi R, La Vecchia C, Negri E. Risk factors for falls in community-dwelling older people: a systematic review and meta-analysis. Epidemiology. 2010;21(5):658–68.
Bower K, Thilarajah S, Pua Y-H, Williams G, Tan D, Mentiplay B, et al. Dynamic balance and instrumented gait variables are independent predictors of falls following stroke. J Neuroeng Rehabil. 2019;16(1):1–9.
Mihailovic A, De Luna RM, West SK, Friedman DS, Gitlin LN, Ramulu PY. Gait and balance as predictors and/or mediators of falls in Glaucoma. Invest Ophthalmol Vis Sci 2020;61(3):30-.
Hollman JH, Kovash FM, Kubik JJ, Linbo RA. Age-related differences in spatiotemporal markers of gait stability during dual task walking. Gait Posture. 2007;26(1):113–9.
Hausdorff JM, Cudkowicz ME, Firtion R, Wei JY, Goldberger AL. Gait variability and basal ganglia disorders: stride-to-stride variations of gait cycle timing in Parkinson's disease and Huntington's disease. Mov Disord. 1998;13(3):428–37.
Hausdorff JM, Rios DA, Edelberg HK. Gait variability and fall risk in community-living older adults: a 1-year prospective study. Arch Phys Med Rehabil. 2001;82(8):1050–6.
Matsumoto H, Makabe T, Morita T, Ikuhara K, Kajigase A, Okamoto Y, et al. Accelerometry-based gait analysis predicts falls among patients with a recent fracture who are ambulatory: a 1-year prospective study. Int J Rehabil Res. 2015;38(2):131–6.
Nikaido Y, Urakami H, Akisue T, Okada Y, Katsuta N, Kawami Y, et al. Associations among falls, gait variability, and balance function in idiopathic normal pressure hydrocephalus. Clin Neurol Neurosurg. 2019;183:105385.
Isho T, Tashiro H, Usuda S. Accelerometry-based gait characteristics evaluated using a smartphone and their association with fall risk in people with chronic stroke. J Stroke Cerebrovasc Dis. 2015;24(6):1305–11.
Craig JJ, Bruetsch AP, Huisinga JM. Coordination of trunk and foot acceleration during gait is affected by walking velocity and fall history in elderly adults. Aging Clin Exp Res. 2019;31(7):943–50.
Liu J, Zhang X, Lockhart TE. Fall risk assessments based on postural and dynamic stability using inertial measurement unit. Saf Health Work. 2012;3(3):192–8.
Yoneyama M. Visualising gait symmetry/asymmetry from acceleration data. Comput Methods Biomech Biomed Engin. 2015;18(9):923–30.
Caliandro P, Conte C, Iacovelli C, Tatarelli A, Castiglia SF, Reale G, et al. Exploring risk of falls and dynamic unbalance in cerebellar ataxia by inertial sensor assessment. Sensors. 2019;19(24):5571.
Punt M, Bruijn SM, van Schooten KS, Pijnappels M, van de Port IG, Wittink H, et al. Characteristics of daily life gait in fall and non fall-prone stroke survivors and controls. J Neuroeng Rehabil. 2016;13(1):1–7.
Najafi B, Horn D, Marclay S, Crews RT, Wu S, Wrobel JS. Assessing postural control and postural control strategy in diabetes patients using innovative and wearable technology. J Diabetes Sci Technol. 2010;4(4):780–91.
Schwenk M, Mohler J, Wendel C, D'Huyvetter K, Fain M, Taylor-Piliae R, et al. Wearable sensor-based in-home assessment of gait, balance, and physical activity for discrimination of frailty status: baseline results of the Arizona frailty cohort study. Gerontology. 2015;61(3):258–67.
Nikaido Y, Akisue T, Kajimoto Y, Ikeji T, Kawami Y, Urakami H, et al. The effect of CSF drainage on ambulatory center of mass movement in idiopathic normal pressure hydrocephalus. Gait Posture. 2018;63:5–9.
Nazarahari M, Rouhani H. Detection of daily postures and walking modalities using a single chest-mounted tri-axial accelerometer. Med Eng Phys. 2018;57:75–81.
Swearingen JJ, Young JW. Determination of centers of gravity of children, sitting and standing: Federal Aviation Agency. Office of Aviation Medicine. 1965.
Tesio L, Rota V. The motion of body Center of Mass during Walking: a review oriented to clinical applications. Front Neurol. 2019;10:999.
Schepers HM, Van Asseldonk EH, Buurke JH, Veltink PH. Ambulatory estimation of center of mass displacement during walking. IEEE Trans Biomed Eng. 2009;56(4):1189–95.
Najafi B, Aminian K, Paraschiv-Ionescu A, Loew F, Bula CJ, Robert P. Ambulatory system for human motion analysis using a kinematic sensor: monitoring of daily physical activity in the elderly. IEEE Trans Biomed Eng. 2003;50(6):711–23.
Najafi B, Aminian K, Loew F, Blanc Y, Robert PA. Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly. IEEE Trans Biomed Eng. 2002;49(8):843–51.
Del Din S, Hickey A, Hurwitz N, Mathers JC, Rochester L, Godfrey A. Measuring gait with an accelerometer-based wearable: influence of device location, testing protocol and age. Physiol Meas. 2016;37(10):1785.
Nguyen N, Phan D, Pathirana PN, Horne M, Power L, Szmulewicz D. Quantification of axial abnormality due to cerebellar ataxia with inertial measurements. Sensors. 2018;18(9):2791.
Van de Warrenburg BP, Bakker M, Kremer BP, Bloem BR, Allum JH. Trunk sway in patients with spinocerebellar ataxia. Mov Disord. 2005;20(8):1006–13.
Doheny EP, McGrath D, Greene BR, Walsh L, McKeown D, Cunningham C, et al., editors. Displacement of centre of mass during quiet standing assessed using accelerometry in older fallers and non-fallers. 2012 Annual international conference of the IEEE engineering in medicine and biology society; 2012: IEEE.
Winter DA. Human balance and posture control during standing and walking. Gait Posture. 1995;3(4):193–214.
Perry J, Davids JR. Gait analysis: normal and pathological function. J Pediatr Orthop. 1992;12(6):815.
Cumming RG, Klineberg RJ. Fall frequency and characteristics and the risk of hip fractures. J Am Geriatr Soc. 1994;42(7):774–8.
Kuo AD. The six determinants of gait and the inverted pendulum analogy: a dynamic walking perspective. Hum Mov Sci. 2007;26(4):617–56.
Cavagna G, Margaria R. Mechanics of walking. J Appl Physiol. 1966;21(1):271–8.
Kuo AD, Donelan JM, Ruina A. Energetic consequences of walking like an inverted pendulum: step-to-step transitions. Exerc Sport Sci Rev. 2005;33(2):88–97.
Inouye SK, Studenski S, Tinetti ME, Kuchel GA. Geriatric syndromes: clinical, research, and policy implications of a core geriatric concept. J Am Geriatr Soc. 2007;55(5):780–91.
Czech MD, Patel S. GaitPy: an open-source python package for gait analysis using an accelerometer on the lower back. J Open Source Software. 2019;4(43):1778.
Galna B, Lord S, Rochester L. Is gait variability reliable in older adults and Parkinson's disease? Towards an optimal testing protocol. Gait Posture. 2013;37(4):580–5.
Van Schooten KS, Pijnappels M, Rispens SM, Elders PJ, Lips P, Daffertshofer A, et al. Daily-life gait quality as predictor of falls in older people: a 1-year prospective cohort study. PLoS One. 2016;11(7):e0158623.
Sherrington C, Tiedemann A. Physiotherapy in the prevention of falls in older people. Aust J Phys. 2015;61(2):54–60.
Detrembleur C, van den Hecke A, Dierick F. Motion of the body Centre of gravity as a summary indicator of the mechanics of human pathological gait. Gait Posture. 2000;12(3):243–50.
Iida H, Yamamuro T. Kinetic analysis of the center of gravity of the human body in normal and pathological gaits. J Biomech. 1987;20(10):987–95.
Hof AL. The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking. Hum Mov Sci. 2008;27(1):112–25.
Tesio L, Rota V, Chessa C, Perucca L. The 3D path of body Centre of mass during adult human walking on force treadmill. J Biomech. 2010;43(5):938–44.
Massaad F, Dierick F, Van Den Hecke A, Detrembleur C. Influence of gait pattern on the body's Centre of mass displacement in children with cerebral palsy. Dev Med Child Neurol. 2004;46(10):674–80.
Minetti AE, Cisotti C, Mian OS. The mathematical description of the body Centre of mass 3D path in human and animal locomotion. J Biomech. 2011;44(8):1471–7.
Lee SW, Verghese J, Holtzer R, Mahoney JR, Oh-Park M. Trunk sway during walking among older adults: norms and correlation with gait velocity. Gait Posture. 2014;40(4):676–81.
Adkin A, Bloem B, Allum J. Trunk sway measurements during stance and gait tasks in Parkinson's disease. Gait Posture. 2005;22(3):240–9.
Fukuchi CA, Fukuchi RK, Duarte M. Effects of walking speed on gait biomechanics in healthy participants: a systematic review and meta-analysis. Syst Rev. 2019;8(1):153.
Jacobs JV. A review of stairway falls and stair negotiation: lessons learned and future needs to reduce injury. Gait Posture. 2016;49:159–67.
Hird N, Ghosh S, Kitano H. Digital health revolution: perfect storm or perfect opportunity for pharmaceutical R&D? Drug Discov Today. 2016;21(6):900–11.
Nantel J, McDonald JC, Bronte-Stewart H. Effect of medication and STN-DBS on postural control in subjects with Parkinson’s disease. Parkinsonism Relat Disord. 2012;18(3):285–9.
Balzer K, Bremer M, Schramm S, Lühmann D, Raspe H. Falls prevention for the elderly. GMS health technology assessment. 2012;8.
Mahoney J, Sager M, Dunham NC, Johnson J. Risk of falls after hospital discharge. J Am Geriatr Soc. 1994;42(3):269–74.
Mombers C, Legako K, Gilchrist A. Identifying medical wearables and sensor technologies that deliver data on clinical endpoints. Br J Clin Pharmacol. 2016;81(2):196.
Acknowledgements
The authors would like to thank the staff from NeuroSpine clinic for assisting with conduct of the project and provision of study materials.
Funding
The authors declare that they have no funding.
Author information
Authors and Affiliations
Contributions
(I): Conception and design: RM. (II): Administrative support: RM, MM, (III): Provision of study materials or patients: RJM, CB, DH. (IV): Collection and assembly of data: DH, CB, LS, PN. (V): Data analysis and interpretation: PN, RJM, RDF. (VI): Manuscript writing: RM, PN, RDF, (VII): Final approval of manuscript: All authors.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Ethics for this study was obtained from the South-Eastern Sydney Local Health District Ethics Board under reference code HREC: 17/184. All methods were carried out in accordance with the guidelines and regulations of the ethics approval. Written informed consent was obtained from included participants prior to participation in this study.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Mobbs, R.J., Natarajan, P., Fonseka, R.D. et al. Walking orientation randomness metric (WORM) score: pilot study of a novel gait parameter to assess walking stability and discriminate fallers from non-fallers using wearable sensors. BMC Musculoskelet Disord 23, 304 (2022). https://doi.org/10.1186/s12891-022-05211-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s12891-022-05211-1