
Abstract
A double-loop iterative method is proposed to design allpass variable fractional-delay (VFD) digital filters basing on the minimization of root-mean-squared group-delay error. In the inner loop, an iterative quadratic optimization is proposed to replace the original nonlinear optimization for the minimization of root-mean-squared group-delay error, while an iterative weighting-updated technique is applied in the outer loop to further reduce the maximum group-delay error. Several examples will be presented to demonstrate the effectiveness and good convergence of the proposed method.
Similar content being viewed by others

1. Introduction
For the past decade, the design of variable fractional-delay (VFD) digital filters became an important topic in digital signal processing due to their wide applications in signal processing and communication systems such as comb filter design, sample rate conversion, tunable modulator and acoustic system [1–5]. Since Farrow proposed an effective structure for implementing variable digital filter [6], several works concerning VFD filter design have been presented, including an excellent tutorial paper by Laakso, and so forth [7], FIR-based design [8–11], IIR-based design [12, 13] and allpass-based design [14–24] with their respective feature.
In this paper, the design of allpass VFD digital filters is investigated on the possible minimization of root-mean-squared group-delay error. Among the existing literature in which allpass structure is applied, most applications concern the minimization of phase-oriented error, and only [23] focuses on the minimization of root-mean-squared group-delay error by converting a nonlinear optimization problem to a linear least-squares (LS) optimization problem.
In this paper, an alternative method will be presented with comparable performance. Likely, the direct approximation of group-delay response is a highly nonlinear problem, so an iterative quadratic optimization will be proposed to overcome it in this paper. Then a weighting-updated technique [11, 25] is proposed to further reduce the maximum group-delay error of the designed system, which constitutes the outer loop of the overall process while the iteration stated above makes up the inner loop.
As to the stability, it has been shown in previous works [26–29] that there exists a necessary and sufficient condition for positive-valued group delay  of the designed allpass filter with order
of the designed allpass filter with order  as follows:
as follows:

It is also pointed out in [26] that if the allpass filter design has a phase approximating error less than  at
at  it must be stable. In this paper, although there is no theoretical proof, it can be found that the designed allpass VFD filter is usually stable when mean delay of the desired response is equal to the order of the designed allpass filter and the range of adjustable parameter is properly assigned.
it must be stable. In this paper, although there is no theoretical proof, it can be found that the designed allpass VFD filter is usually stable when mean delay of the desired response is equal to the order of the designed allpass filter and the range of adjustable parameter is properly assigned.
This paper is organized as follows. In Section 2, the review of conventional weighted least-squares (WLS) design (as Deng's method [21]) basing on the minimization of phase-oriented error and frequency-response-oriented error is given, and it will be shown that both will lead to the same solution. The formal formulation for LS group-delay error design of allpass VFD filters will be presented in Section 3, in which an iterative method is proposed to replace the original nonlinear optimization of group-delay-oriented error. Then in Section 4, a weighting-updated technique is proposed to further reduce the maximum group-delay error, and design examples will be given to demonstrate the effectiveness and good convergence of the proposed double-loop iterative method. Also, an example with a different range of the adjustable variable is given to show the significant effect on overall performance, which has also been revealed in [14, 24]. Finally, the conclusions are given in Section 5.
2. Review of Deng's Method of Allpass VFD Digital Filters
For the design of an allpass VFD digital filter as in [21], the desired frequency response can be given by

where  is the parameter used to adjust fractional delay and
is the parameter used to adjust fractional delay and  denotes the order of the designed allpass filter. The transfer function of an allpass VFD digital filter is characterized by
denotes the order of the designed allpass filter. The transfer function of an allpass VFD digital filter is characterized by

where

and the coefficients  are expressed as the polynomials of
are expressed as the polynomials of 

so (3) becomes

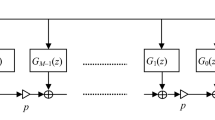
which can be implemented by the structure shown in Figure 1. Comparing with the structures in [15, 19] in which all elements are processed once for each input data, the proposed structure is designed such that the coefficient generator will generate an updated coefficient only on the demand of variation and the values of coefficients can be stored in memory, which can save enormous computation.

(a) The proposed structure of an allpass VFD digital filter ( ,
,  ). (b) Coefficient generator (
). (b) Coefficient generator ( ).
).
By (6), the frequency response of the designed system is

which is used to approximate (2) as much as possible over the region  .
.
2.1. Phase-Oriented Approximation
Due to the unit magnitude gain for allpass filters, the design problem can focus on the phase approximation, that is, the phase of(7)

will be desirable to approximate the phase of(2)

so the error function can be represented by

2.2. Frequency-Response-Oriented Approximation
An alternative view point of the design problem is the direct approximation of (2) by (7), that is, the error function is given by

For good approximation,  , so
, so

Hence, both phase- and frequency-response-oriented approximations will lead to the same solution.
2.3. WLS Solution of the Design Problem
By (10),

which is desirable to approximate zero over  , and the problem can be converted into
, and the problem can be converted into

where " " means "approximate." Equation (14) can be further replaced by
" means "approximate." Equation (14) can be further replaced by

Hence, the root-mean-squared objective error function for WLS design of an allpass VFD digital filter can be represented by

where  is a positive-valued weighting function, the superscript
is a positive-valued weighting function, the superscript  denotes the transpose operator,
denotes the transpose operator,

and the quadratic minimization of (16) will result in

3. LS Group-Delay Error Design of Allpass VFD Digital Filters
In this section, a delay-oriented approximation for designing allpass VFD digital filters will be proposed. The desired group-delay response can be obtained by

and the actual delay response of the designed system is

where

Obviously, the objective error function for a delay-oriented approximation can be represented by

where  denotes
denotes  .
.
However, the direct minimization of (22) is highly nonlinear, so an iterative method is proposed to solve it in this section and the objective error function in the  th iteration becomes
th iteration becomes

where the vector denoted by the subscript " " represents coefficient vector to be determined in the
" represents coefficient vector to be determined in the  th iteration,
th iteration,  has been likely defined in (16),
has been likely defined in (16),  is a relative weighting constant, and the functions denoted by the subscript "
is a relative weighting constant, and the functions denoted by the subscript " " are defined by
" are defined by

It is noted that  is included in (23) and
is included in (23) and  must be chosen large enough to avoid the phase response of the designed system deviating from the desired one too much. Moreover, the denominator in (22) is ignored for the iterative method in (23), which will yield satisfactory results. Equation (23) can be further represented in a quadratic form as
must be chosen large enough to avoid the phase response of the designed system deviating from the desired one too much. Moreover, the denominator in (22) is ignored for the iterative method in (23), which will yield satisfactory results. Equation (23) can be further represented in a quadratic form as

where

Notice that  is so arranged that it is symmetric and positive-definite. Differentiating (25) with respect to
is so arranged that it is symmetric and positive-definite. Differentiating (25) with respect to  and setting the result to zero, the solution for minimizing (25) in the
and setting the result to zero, the solution for minimizing (25) in the  th iteration can be obtained as
th iteration can be obtained as

To terminate the iterative process, the relative norm is defined by

When  is small enough, for example, smaller than
is small enough, for example, smaller than  , where
, where  is a preassigned very small positive constant, the iterative process can stop. In this paper,
is a preassigned very small positive constant, the iterative process can stop. In this paper,  is used. As to the initial coefficient vector
is used. As to the initial coefficient vector  , we can adopt the solution in (18) by setting
, we can adopt the solution in (18) by setting  . The details of iterative procedures will be described in the next section.
. The details of iterative procedures will be described in the next section.
To evaluate the accuracy of the designed system, the normalized root-mean-squared group-delay error, the maximum group-delay error, the normalized root-mean-squared phase error, and the maximum phase error are defined by

respectively. To compute (29), the frequency  and the variable
and the variable  are uniformly sampled at step sizes
are uniformly sampled at step sizes  and
and  , respectively.
, respectively.
Example 1.
This example deals with the proposed LS design of an  ,
,  ,
,  allpass VFD filter. To properly choose
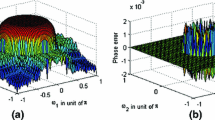
allpass VFD filter. To properly choose  in (23), Figures 2(a) and 2(b) present the curves of
in (23), Figures 2(a) and 2(b) present the curves of  and
and  , respectively, when
, respectively, when  varies from 1 to 2000. In this paper,
varies from 1 to 2000. In this paper,  is used, and the design took three iterations. Figure 3(a) presents the obtained group-delay responses while the absolute errors of group-delay and phase are shown in Figures 3(b) and 3(c), respectively, accompanying those of the Deng's method in Section 2. The related errors in (29) are tabulated in Table 1. It can be observed that both
is used, and the design took three iterations. Figure 3(a) presents the obtained group-delay responses while the absolute errors of group-delay and phase are shown in Figures 3(b) and 3(c), respectively, accompanying those of the Deng's method in Section 2. The related errors in (29) are tabulated in Table 1. It can be observed that both  and
and  of the proposed method are smaller than those of the existing method [23], but the performances of
of the proposed method are smaller than those of the existing method [23], but the performances of  and
and  for the proposed method are not as good as those in [23]. Matlab simulations show that the design took about 28.36 seconds on a notebook PC with Intel Core Duo CPU T8300.
for the proposed method are not as good as those in [23]. Matlab simulations show that the design took about 28.36 seconds on a notebook PC with Intel Core Duo CPU T8300.

Curves of (a)
 and (b)
and (b)
 when
when
 varies from 1 to 2000.
varies from 1 to 2000.

Design of an  ,
,  allpass VFD filter. (a) Group-delay responses. (b) Absolute group-delay errors (left: Deng's LS design, right: proposed LS design). (c) Absolute phase errors (left: Deng's LS design, right: proposed LS design). (d) Absolute group-delay errors of the proposed minimax design. (e) Maximum pole radius for
allpass VFD filter. (a) Group-delay responses. (b) Absolute group-delay errors (left: Deng's LS design, right: proposed LS design). (c) Absolute phase errors (left: Deng's LS design, right: proposed LS design). (d) Absolute group-delay errors of the proposed minimax design. (e) Maximum pole radius for  .
.
4. Minimax Group-Delay Error Design of Allpass VFD Digital Filters
In this section, a weighting-updated technique is proposed to minimize the maximum group-delay error of an allpass VFD filter obtained in Section 3, which constitutes the outer loop of the overall process while the iteration in Section 3 makes up the inner loop. The overall iterative process is described in detail below.
Step 1.
Given  ,
,  ,
,  , and
, and  , set
, set  , and find the initial coefficient vector
, and find the initial coefficient vector  by (18).
by (18).
Step 2.
Set the inner iterative counter  .
.
Step 3.
Increase the inner iterative counter  by 1, and calculate
by 1, and calculate  ,
,  ,
,  , and
, and  .
.
Step 4.
Find the coefficient vector  by (27).
by (27).
Step 5.
Check whether the relative norm  is small enough by
is small enough by

If the condition is satisfied, go to the next step; otherwise go to Step 3.
Step 6.
Find the variable  , denoted by
, denoted by  , where the maximum of group-delay error function
, where the maximum of group-delay error function  , defined by
, defined by

occurs for the first outer iteration only. Find the absolute error ripples of  , and denote the
, and denote the  th ripple with ripple interval
th ripple with ripple interval  by
by  ,
,  , where
, where  is the number of ripples in
is the number of ripples in  . Then search the maximum value
. Then search the maximum value  and the minimum value
and the minimum value  of
of  ,
,  .
.
Step 7.
Check whether the error function  is nearly equiripple by
is nearly equiripple by

where  is a preassigned very small positive constant. If the condition is satisfied, stop the process; otherwise go to the next step.
is a preassigned very small positive constant. If the condition is satisfied, stop the process; otherwise go to the next step.
Step 8.
Compute the unnormalized weighting function

and find its maximum value

Then update the weighting function by

Step 9.
Calculate  ,
, in (17) and replace
in (17) and replace  by
by  . Then go to Step 2.
. Then go to Step 2.
Example 2.
Following Example 1, the allpass VFD filter is continuously designed with minimax group-delay error. If  is used, the design took thirteen outer iterations and the respective inner iterations are three and two in the first and second outer iterations, and one in the others. Figure 3(d) presents the final group-delay errors, and the errors computed by (29) are also listed in Table 1. To illustrate the stability of the designed filter, the maximum pole radius is shown in Figure 3(e), which shows that the designed filter is stable since the poles are all inside the unit circle for
is used, the design took thirteen outer iterations and the respective inner iterations are three and two in the first and second outer iterations, and one in the others. Figure 3(d) presents the final group-delay errors, and the errors computed by (29) are also listed in Table 1. To illustrate the stability of the designed filter, the maximum pole radius is shown in Figure 3(e), which shows that the designed filter is stable since the poles are all inside the unit circle for  .
.
Example 3.
In practice, the range of  may not be limited in
may not be limited in  , and the overall performance may be even better. For example, if the allpass VFD filter is designed again with
, and the overall performance may be even better. For example, if the allpass VFD filter is designed again with  for both LS design and minimax design, the absolute errors of group-delay for LS design and minimax design are presented in Figures 4(a) and 4(b), respectively. The errors in (29) are also tabulated in Table 1, from which it can be shown that the performance of the design with
for both LS design and minimax design, the absolute errors of group-delay for LS design and minimax design are presented in Figures 4(a) and 4(b), respectively. The errors in (29) are also tabulated in Table 1, from which it can be shown that the performance of the design with  is much better than that with
is much better than that with  . In this example, the minimax design took eighteen outer iterations, and the respective inner iterations are three and two in the first and second outer iterations, and one in the others. The final maximum pole radius is presented in Figure 4(c), which shows that the designed allpass VFD filter is stable. Also, the filter coefficients for LS and minimax designs are tabulated in Tables 2 and 3, respectively.
. In this example, the minimax design took eighteen outer iterations, and the respective inner iterations are three and two in the first and second outer iterations, and one in the others. The final maximum pole radius is presented in Figure 4(c), which shows that the designed allpass VFD filter is stable. Also, the filter coefficients for LS and minimax designs are tabulated in Tables 2 and 3, respectively.

Design of an  ,
,  ,
,  ,
,  allpass VFD filter. (a) Absolute group-delay errors of the proposed LS design. (b) Absolute group-delay errors of the proposed minimax design. (c) Maximum pole radius for .
allpass VFD filter. (a) Absolute group-delay errors of the proposed LS design. (b) Absolute group-delay errors of the proposed minimax design. (c) Maximum pole radius for .
5. Conclusions
In this paper, a double-loop iterative method has been proposed to minimize the root-mean-squared group-delay error in LS and minimax senses for the design of allpass VFD digital filters. For the LS design, an iterative quadratic optimization is used in the inner loop, while a weighting-updated technique is further applied to minimize the maximum group-delay error in the outer loop. From the presented experiments, it has been shown that the performance in group delay and phase for the proposed systems can be improved drastically by appropriately specifying the range of fractional delay. For the computational complexity, although the design time of the proposed method is much more than the existing methods, an alternative method has been revealed in this paper for further research in the future.
References
Pei SC, Tseng CC: A comb filter design using fractional-sample delay. IEEE Transactions on Circuits and Systems II 1998, 45(5):649-653. 10.1109/82.673650
Rajamani K, Lai YS, Farrow CW: Efficient algorithm for sample rate conversion from CD to DAT. IEEE Signal Processing Letters 2000, 7(10):288-290. 10.1109/97.870683
Sobot R, Stapleton S, Syrzycki M: Tunable continuous-time bandpass ΣΔ modulators with fractional delays. IEEE Transactions on Circuits and Systems I 2006, 53(2):264-273.
Cho KJ, Park JS, Kim BK, Chung JG, Parhi KK: Design of a sample-rate converter from CD to DAT using fractional delay allpass filter. IEEE Transactions on Circuits and Systems II 2007, 54(1):19-23.
Lehtonen HM, Välimäki V, Laakso TI: Canceling and selecting partials from musical tones using fractional-delay filters. Computer Music Journal 2008, 32(2):43-56. 10.1162/comj.2008.32.2.43
Farrow CW: Continuously variable digital delay element. Proceedings of the IEEE International Symposium on Circuits and Systems, May 1998 2641-2645.
Laakso TI, Välimäki V, Karjalainen M, Laine UK: Splitting the unit: delay tools for fractional delay filter design. IEEE Signal Processing Magazine 1996, 13(1):30-60. 10.1109/79.482137
Zhao H, Yu J: A simple and efficient design of variable fractional delay FIR filters. IEEE Transactions on Circuits and Systems II 2006, 53(2):157-160.
Deng TB, Lian Y: Weighted-least-squares design of variable fractional-delay FIR filters using coefficient symmetry. IEEE Transactions on Signal Processing 2006, 54(8):3023-3038.
Deng TB: Symmetric structures for odd-order maximally flat and weighted-least-squares variable fractional-delay filters. IEEE Transactions on Circuits and Systems I 2007, 54(12):2718-2732.
Shyu JJ, Pei SC, Chan CH, Huang YD: Minimax design of variable fractional-delay FIR digital filters by iterative weighted least-squares approach. IEEE Signal Processing Letters 2008, 15: 693-696.
Zhao H, Kwan HK: Design of 1-D stable variable fractional delay IIR filters. IEEE Transactions on Circuits and Systems II 2007, 54(1):86-90.
Tsui KM, Chan SC, Kwan HK: A new method for designing causal stable IIR variable fractional delay digital filters. IEEE Transactions on Circuits and Systems II 2007, 54(11):999-1003.
Välimäki V: Discrete-time modeling of acoustic tubes using fractional delay filters, Doctoral thesis. Helsinki University of Technology, Espoo, Finland; 1995.
Makundi M, Laakso TI, Välimäki V: Efficient tunable IIR and allpass filter structures. Electronics Letters 2001, 37(6):344-345. 10.1049/el:20010276
Makundi M, Välimäki V, Laakso TI: Closed-form design of tunable fractional-delay allpass filter structures. Proceedings of the IEEE International Symposium on Circuits and Systems, May 2001, Sydney, Australia 434-437.
Tseng CC: Eigenfilter approach for the design of variable fractional delay FIR and all-pass filters. IEE Proceedings: Vision, Image and Signal Processing 2002, 149(5):297-303. 10.1049/ip-vis:20020629
Tseng CC: Design of 1-D and 2-D variable fractional delay allpass filters using weighted least-squares method. IEEE Transactions on Circuits and Systems I 2002, 49(10):1413-1422. 10.1109/TCSI.2002.803361
Yli-Kaakinen J, Saramäki T: An algorithm for the optimization of adjustable fractional-delay all-pass filters. Proceedings of the IEEE International Symposium on Cirquits and Systems, May 2004 3: 153-156.
Pei SC, Wang PH: Closed-form design of all-pass fractional delay filters. IEEE Signal Processing Letters 2004, 11(10):788-791. 10.1109/LSP.2004.835473
Deng TB: Noniterative WLS design of allpass variable fractional-delay digital filters. IEEE Transactions on Circuits and Systems I 2006, 53(2):358-371.
Hacihabiboǧlu H, Günel B, Kondoz AM: Analysis of root displacement interpolation method for tunable allpass fractional-delay filters. IEEE Transactions on Signal Processing 2007, 55(10):4896-4906.
Lee WR, Caccetta L, Rehbock V: Optimal design of all-pass variable fractional-delay digital filters. IEEE Transactions on Circuits and Systems I 2008, 55(5):1248-1256.
Shyu JJ, Pei SC, Chan CH: Minimax phase error design of allpass variable fractional-delay digital filters by iterative weighted least-squares method. Signal Processing 2009, 89(9):1774-1781. 10.1016/j.sigpro.2009.03.021
Chi CY, Kou YT: A new self-initiated optimum WLS approximation method for the design of linear phase FIR digital filters. Proceedings of the IEEE International Symposium on Circuits and Systems, June 1991 168-171.
Jing Z: A new method for digital all-pass filter design. IEEE Transactions on Acoustics, Speech, and Signal Processing 1987, 35(11):1557-1564. 10.1109/TASSP.1987.1165067
Lang M, Laakso TI: Simple and robust method for the design of allpass filters using least-squares phase error criterion. IEEE Transactions on Circuits and Systems II 1994, 41(1):40-48. 10.1109/82.275662
Nguyen TQ, Laakso TI, Koilpillai RD: Eigenfilter approach for the design of allpass filters approximating a given phase response. IEEE Transactions on Signal Processing 1994, 42(9):2257-2263. 10.1109/78.317848
Rajamani K, Lai YS: Novel method for designing allpass digital filters. IEEE Signal Processing Letters 1999, 6(8):207-209. 10.1109/97.774868
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License ( https://creativecommons.org/licenses/by/2.0 ), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Chan, CH., Pei, SC. & Shyu, JJ. A New Method for Least-Squares and Minimax Group-Delay Error Design of Allpass Variable Fractional-Delay Digital Filters. EURASIP J. Adv. Signal Process. 2010, 976913 (2011). https://doi.org/10.1155/2010/976913
Received:
Accepted:
Published:
DOI: https://doi.org/10.1155/2010/976913