
Abstract—
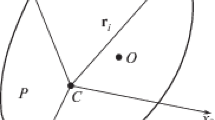
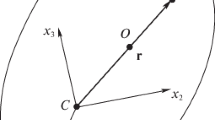
The problem of control of the spatial orientation for a rigid body is considered by means of an auxiliary point mass. Motion of the point mass is obtained that provides the prescribed change of the body orientation.


Similar content being viewed by others

REFERENCES
F. L. Chernous’ko, Doklady Math. 97, 295 (2018). https://doi.org/10.1134/S1064562418030195
A. M. Shmatkov, Dokl. Phys. 63, 337 (2018). https://doi.org/10.1134/S1028335818080062
F. L. Chernous’ko, J. Appl. Mech. Tech. Phys. 60, 278 (2019). https://doi.org/10.1134/S0021894419020093
N. Yu. Naumov and F. L. Chernous’ko, J. Comput. Syst. Sci. Int. 58, 252 (2019). https://doi.org/10.1134/S106423071902014X
Funding
This work was supported by the Russian Science Foundation, project no. 18-11-00307.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by E. Oborin
Rights and permissions
About this article

Cite this article
Chernousko, F.L. Change of Orientation of a Rigid Body by Means of an Auxiliary Mass. Dokl. Phys. 65, 72–74 (2020). https://doi.org/10.1134/S1028335820020032
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1028335820020032