
Abstract
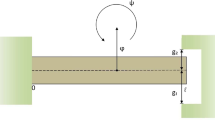
This paper considers two minimal-time control problems for a mechanical system that consists of a material point and an obstacle interacting with each other through a spring with elastic or viscoelastic properties. The interaction interval is determined by physical conditions of contact. It is studied how interaction time and the coefficient of restitution depend on the viscoelastic properties of the spring. A program module is developed in Python and the behavior of this material point-obstacle system is simulated.
Similar content being viewed by others
References
Miller, B.M. and Rubinovich, E.Ya., Discontinuos Solutions in the Optimal Control Problems and Their Representation by Singular Space–Time Transformations, Autom. Remote Control, 2013, vol. 74, no. 12, pp. 1969–2006.
Kozlov, V.V. and Treshchev, D.V., Billiardy. Geneticheskoe vvedenie v dinamiku sistem s udarami (Billiards. A Genetic Introduction to the Dynamics of Systems with Impacts), Moscow: Mosk. Gos. Univ., 1991.
Galyaev, A.A., Impact of a System of Material Points Against an Absolutely Rigid Obstacle: A Model for Its Impulsive Action, Autom. Remote Control, 2006, vol. 67, no. 6, pp. 856–867.
Galyaev, A.A., Optimal Pulse Control of Dynamic Systems in the Shock Phase, Autom. Remote Control, 2006, no. 1, pp. 65–77.
Galyaev, A.A., On One Problem of Optimal Control at the Impact Phase and Unification of the Interaction End Instants, Autom. Remote Control, 2010, vol. 71, no. 12, pp. 2505–2517.
Galyaev, A.A., On the Mathematical Model of One–Dimensional Impact of a Chain of Viscoelastic Bodies, Autom. Remote Control, 2015, vol. 76, no. 10, pp. 1743–1750.
Borovin, G.K., Lapshin, V.V., and Yurin, E.A., Nonlinear Model of Collinear Collision with Dry Friction, Preprint of Keldysh Inst. of Applied Mathematics, Russ. Acad. Sci., 2014, no. 46.
Miller, B.M., Rubinovich, E.Ya., and Bentsman, J.G., Singular Space–Time Transformations. Method for Solving the Painleve Problem, J. Math. Sci., 2016, vol. 219, no. 2, pp. 208–219.
Girsanov, I.V., Lektsii po matematicheskoi teorii ekstremal’nykh zadach (Lectures on Mathematical Theory of Extremum Problems), Izhevsk: Regulyarnya i Khaoticheskaya Dinamika, 2003.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Russian Text © A.A. Galyaev, P.V. Lysenko, 2018, published in Problemy Upravleniya, 2018, No. 4, pp. 14–20.
Rights and permissions
About this article

Cite this article
Galyaev, A.A., Lysenko, P.V. Minimal-Time Control Problem under Elastic and Viscoelastic Body-Surface Interactions. Autom Remote Control 80, 733–743 (2019). https://doi.org/10.1134/S0005117919040106
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0005117919040106