
Abstract
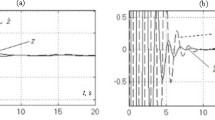
A scheme of robust control of uncertain plants which does without measuring the derivatives of the controlled variable and compensates the bounded external perturbations to within δ was proposed. Consideration was given to the problems of stabilization and reference model-based control. Examples of computer-assisted simulation illustrating efficiency of the propose scheme of control were presented.
Similar content being viewed by others

References
Voronov, K.V. and Nikiforov, V.O., Dynamic Controller of the Output Variable with Compensation of Permanent Perturbations, Avtom. Telemekh., 2003, no. 2, pp. 11–21.
Nikiforov, V.O., Nonlinear Control System with Compensation of the External Deterministic Perturbations, Izv. Ross. Akad. Nauk, Teor. Sist. Upravlen., 1997, no. 4, pp. 69–73.
Bobtsov, A.A., Robust Control Algorithm of the Uncertain Plant without Measurement of the Derivatives of the Controlled Variable, Avtom. Telemekh., 2003, no. 8, pp. 82–96.
Bobtsov, A.A., Algorithm of Robust Control of the Linear Plant by Output with Compensation of the Unknown Deterministic Perturbation, Izv. Ross. Akad. Nauk, Teor. Sist. Upravlen., 2003, no. 2, pp. 93–97.
Nikiforov, V.O., Observers of the External Deterministic Perturbations, I. Plants with Certain Parameters, Avtom. Telemekh., 2004, no. 10, pp. 13–24.
Nikiforov, V.O., Observers of the External Deterministic Perturbations, II. Plants with Uncertain Parameters, Avtom. Telemekh., 2004, no. 11, pp. 40–48.
Feuer, A. and Morse, A.S., Adaptive Control of Single-input, Single-output Linear Systems, IEEE Trans. Automat. Control, 1978, vol. 23, no. 4, pp. 557–569.
Atassi, A.N. and Khalil, H.K., Separation Principle for the Stabilization of Class of Nonlinear Systems, IEEE Trans. Automat. Control, 1999, vol. 44, no. 9, pp. 1672–1687.
Marino, R. and Tomei, P., Observer-based Adaptive Stabilization for a Class of Nonlinear Systems, Automatica, 1992, vol. 28, pp. 787–793.
Brusin, V.A., On a Class of Singular Perturbed Adaptive Systems, Avtom. Telemekh., 1995, no. 4, pp. 119–127.
Author information
Authors and Affiliations
Additional information
Original Russian Text © A. M. Tsykunov, 2007, published in Avtomatika i Telemekhanika, 2007, No. 7, pp. 103–115.
Rights and permissions
About this article
Cite this article
Tsykunov, A.M. Robust control algorithms with compensation of bounded perturbations. Autom Remote Control 68, 1213–1224 (2007). https://doi.org/10.1134/S0005117907070090
Received:
Issue Date:
DOI: https://doi.org/10.1134/S0005117907070090