
Abstract
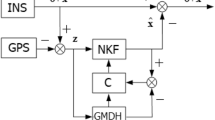
An algorithm for correction of the navigation data of an aircraft that uses an inertial navigation system and the global positioning system (GPS) is considered. Estimation algorithms, namely, linear and nonlinear Kalman filters, are investigated. A method for modification of the nonlinear Kalman filter with the use of a genetic algorithm has been developed. To estimate the operability and accuracy of the modified nonlinear Kalman filter, simulation based on the data of a laboratory experiment conducted with the use of real navigation systems KIND34-059 and AIST-350 has been performed. The results of the laboratory experiments conducted with the use of real navigation systems have demonstrated high accuracy of data processing by the nonlinear Kalman filter modified by the genetic algorithm.
Similar content being viewed by others


References
K. A. Neusypin, Modern Systems and Methods of Guidance, Navigation and Control of Aircrafts (MGOU, Moscow, 2009) [in Russian].
O. S. Salychev, MEMS-Based Inertial Navigation: Expectations and Reality (BMSTU, Moscow, 2012).
M. N. Krasil’shchikov, K. I. Sypalo, and D. A. Kozorez, Avtom. Telemekh., No. 3, 72 (2010).
A. S. Devyatisil’nyi and K. A. Chislov, Geodez. Kartograf., No. 10, 8 (2015).
O. A. Stepanov, Application of Nonlinear Filtering Theory in Problems of the Navigational Information Processing (TsNII Elektropribor, St. Petersburg, 1998) [in Russian].
B. I. Shakhtarin, Nonlinear Optimum Filtering in Examples and Problems (Gelios ARV, Moscow, 2008) [in Russian].
H. A. Shelukhina and K. A. Neusypin, Vestn. Mosk. Gos. Tekh. Univ. Im. N. E. Baumana, Ser. Priborostroenie, No. 1, 54 (2000).
A. G. Ivakhnenko and I. Ya. Myuller, Self-Organization of Predictive Models (Tekhnika, Kiev, 1985) [in Russian].
S. Haykin, Neural Networks: A Comprehensive Foundation (Upper Saddle River, N.J., Prentice Hall, 1999; Vil’yams, Moscow, 2006).
A. S. Devyatisil’nyi and K. A. Chislov, Mekhatronika, Avtomatizatsiya, Upravlenie, No. 9, 60 (2014).
O. A. Stepanov and O. S. Amocov, Aviakosmich. Priborostr., No. 6, 46 (2004).
J. R. Koza, Genetic Programming: On the Programming of Computers by Means of Natural Selection (MIT Press, Cambridge, MA, 1992).
P. Tichavsky, C. H. Muravchik, and A. Nehorai, IEEE Trans. Signal Process. 46, 1386 (1998).
M. Šimandl, J. Královec, and P. Tichavský, Automatica 37, 1703 (2001).
H. L. Van Trees and K. L. N. Y. Bell, Bayesian Bounds for Parameter Estimation and Nonlinear Filtering (Tracking) (Wiley-IEEE, New York, 2007).
A. V. Proletarskii and K. A. Neusypin, Avtomatizatsiya. Covrem. Tekhnol., No. 6, 40 (2014).
Author information
Authors and Affiliations
Corresponding author
Additional information
Original Russian Text © B.I. Shakhtarin, Kai Shen, K.A. Neusypin, 2016, published in Radiotekhnika i Elektronika, 2016, Vol. 61, No. 11, pp. 1065–1072.
Rights and permissions
About this article

Cite this article
Shakhtarin, B.I., Shen, K. & Neusypin, K.A. Modification of the nonlinear kalman filter in a correction scheme of aircraft navigation systems. J. Commun. Technol. Electron. 61, 1252–1258 (2016). https://doi.org/10.1134/S1064226916110115
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064226916110115