
Abstract
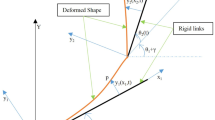
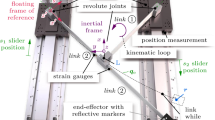
The problem of tip trajectory tracking control is considered in this paper for flexible multi-link manipulators. An integrated optical laser sensor system is utilized to measure the tip deformations of the flexible links. The Lagrangian assumed-mode method incorporating the measured linear displacements and angular deflections of flexible links is used to derive the dynamic model of the flexible manipulator. To reduce as far as possible the tip tracking/positioning errors caused by the link flexibility, an error compensation approach is proposed. The additional compensation amounts of joint variables are calculated kinematically in terms of the measured deformations, and are added to the nominal commands generated by the computed torque controller. The simulation results demonstrate the effectiveness of the proposed approach.
Similar content being viewed by others

References
Tang, S. C. and Wang, C. C., “Computation of the effects of link deflections and joint compliance on robot positioning,” in Proceedings of the 1987 IEEE Conference on Robotics and Automation, Raleigh, pp. 910–915, 1987.
Lin, P. P., Chiang, H. D. and Cui, X. X., “An improved method for on-line calculation and compensation of the static deflection at a robot end-effector,” Journal of Robotic Systems, Vol. 8, No. 2, pp. 267–288, 1991.
Yang, J. H., Liang, F. L. and Fu, L. C., “Nonlinear adaptive control for flexible-link manipulators,” IEEE Transactions on Robotics and Automation, Vol. 13, No. 1, pp. 141–148, 1997.
Kotnic, P. T., Yurkovich, S. and Özgüner, Ñ., “Acceleration feedback for control of a flexible manipulator arm,” Journal of Robot System, pp. 181–195, May, 1988.
Wang, D. and Vidyasagar, M., “Passive control of a single flexible link,” in Proceedings of the 1990 IEEE Conference on Robotics and Automation, Cincinnati, pp. 1432–1437, 1990.
Geniele, H., Patel, R. V. and Khorasoni, K., “End-point control of a flexible-link manipulator: Theory and Experiments,” IEEE Transactions on Control Systems Technology, Vol. 5, No. 6, pp. 556–570, 1997.
Demeester, F. and Van Brussel, H., “Real time optical measurement of robot structural deflections,” Mechatronics, Vol. 1, No. 1, pp. 73–86, 1991.
Swevers, J., Torfs, D. and Demeester, F., “Fast accuracy tracking control of a flexible one-link robot based on real-time link deflection measurements,” Mechatronics, Vol. 2, No. 1, pp. 29–41, 1992.
Xu, W. L., Tso, S. K. and Wang, X. S., “Sensor-based deflection modeling and compensation control of flexible robotic manipulator,” International Journal of Mechanism and Machine Theory, Vol. 33, No. 7, pp. 909–924, 1998.
Yim, W., Zhang, J. H. and Singh, S., “Experimental dual-mode control of a flexible robotic arm,” Robotica, Vol. 10, pp. 135–145, 1992.
Jnifene, A. and Fahim, A., “A computed torque/time delay approach to the end-point control of a one-link flexible manipulator,” Dynamics and Control, Vol. 7, pp. 171–189, 1997.
Ge, S. S., Lee, T. H. and Zhu, G., “A nonlinear feedback controller for a single-link flexible manipulator based on a finite element model,” Journal of Robotic Systems, Vol. 14, No. 3, pp. 165–178, 1997.
Nicosia, S., Valigi, P. and Zaccarian, L., “Dynamic modeling of a two link flexible robot and experiment validation,” in Proceedings of the 1996 IEEE Conference on Robotics and Automation, Minnesota, pp. 1953–1965, 1996.
Theodore, R. J. and Ghosal, A., “Comparison of the assumed modes and finite element models for flexible multilink manipulators,” International Journal of Robotics Research, Vol. 14, No. 2, pp. 91–111, 1995.
Kopacek, P., Desoyer, K. and Lugner, P., “Modeling of flexible robots - An introduction,” IFAC Proceedings Series, Vol. 10, pp. 21–27, 1989.
Ge, S. S., Lee, T. H. and Zhu, G., “Comparison studies between assumed modes method and finite element method in modeling a single-link flexible manipulator,” in Proceedings of 1995 IEEE Conference on Intelligent Control Instrument, Singapore, pp. 376–381, 1995.
Yoshikawa, T. and Hosoda, K., “Modeling of flexible manipulator using virtual rigid links and passive joints,” International Journal of Robotics Research, Vol. 15, No. 3, pp. 290–299, 1996.
Low, K. H. and Vidyasagar, M., “A Lagrangian formulation of the dynamic model for flexible manipulator systems,” ASME Journal of Dynamic Systems, Measurement and Control, Vol. 110, pp. 175–181, 1988.
Kalra, P. and Sharan, A.M., “Accurate modeling of flexible manipulators using finite element analysis,” Journal of Mechanism and Machine Theory, Vol. 26, pp. 299–313, 1991.
Moallem, M., Khorasani, K. and Patel, R. V., “An integral manifold approach for tip-position tracking of flexible multi-link manipulators,” IEEE Transactions on Robotics and Automation, Vol. 13, No. 6, pp. 823–837, 1997.
Yang, T. W., Xu, W. L. and Tso, S. K., “Fuzzy dynamics control of a flexible two-link arm based on rigid dynamics with flexible state feedback,” in Proceedings of the 5th International Conference on Mechatronics and Machine Vision in Practice, Nanjing, pp. 381–386, 1998.
Sharon, A., Hogan, N. and Hardt, D., “The macro/micro manipulator: an improved architecture for robot control,” Robotics and Computer-Integrated Manufacturing, Vol. 10, No. 3, pp. 209–222, 1993.
Yoshikawa, T., Harada, K. and Matsumoto, A., “Hybrid position/force control of flexible-macro\rigid-micro manipulator systems,” IEEE Transactions on Robotics and Automation, Vol. 12, No. 4, pp. 633–639, 1996.
Yishikawa, T., Foundations of Robotics, MIT Press, 1990.
Junkins, J. L. and Kim, Y., Introduction to Dynamics and Control of Flexible Structures, AIAA Education Series, Ohio, 1993.
Canudas de Wit, C., Siciliano, B. and Bastin, G., Theory of Robot Control, Springer: London, 1996.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Yang, T.W., Xu, W.L. & Tso, S.K. Dynamic Modeling Based on Real-Time Deflection Measurement and Compensation Control for Flexible Multi-Link Manipulators. Dynamics and Control 11, 5–24 (2001). https://doi.org/10.1023/A:1017954615442
Issue Date:
DOI: https://doi.org/10.1023/A:1017954615442