
Abstract
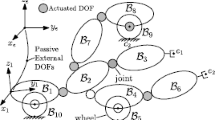
This paper is concerned with the modeling of wheels within the framework of finite element-based dynamic analysis of nonlinear, flexible multibody systems. The overall approach to the modeling of wheels is broken into four distinct parts: a purely kinematic part describing the configuration of the wheel and contacting plane, a unilateral contact condition giving rise to a contact force, the friction forces associated with rolling and/or sliding, and a model of the deformations in the wheel tire. The formulation of these various aspects of the problem involves a combination of holonomic and non-holonomic constraints enforced via the Lagrange multiplier technique. This work is developed within the framework of energy-preserving and decaying time integration schemes that provide unconditional stability for nonlinear, flexible multibody systems involving wheels. Strategies for dealing with the transitions from rolling to sliding and vice-versa are discussed and are found to be more efficient than the use of a continuous friction law. Numerical examples are presented that demonstrate the efficiency and accuracy of the proposed approach.
Similar content being viewed by others

References
Kalker, J.J.,‘Survey of wheel-rail rolling contact theory’ Vehicle System Dynamics 5, 1979, 317–358.
Gim, G. and Nikravesh, P.E.,‘Analytical model of pneumatic tyres for vehicle dynamic simulations. Part I’ International Journal of Vehicle Design 11, 1990, 589–618.
Moreland, W.J.,‘The story of shimmy’ Journal of Aeronautical Sciences 21, 1954, 793–808.
Von Schlippe, B.,‘shimmying of a pneumatic wheel’ NACA TM-1365, 1954.
Collins, R.L. and Black, R.J.,‘Experimental determination of tire parameters for aircraft landing gear shimmy stability studies’ AIAA Paper No. 68-211, 1968.
Cardona, A., Géradin, M. and Doan, D.B.,‘Rigid and flexible joint modelling in multi-body dynamics using finite elements’ Computer Methods in Applied Mechanics and Engineering 89, 1991, 395–418.
Pfeiffer, F. and Glocker, C., Multi-Body Dynamics with Unilateral Contacts, John Wiley & Sons, New York, 1996.
Rabinowicz, E., Friction and Wear of Materials, second edition, John Wiley & Sons, New York, 1995.
Oden, J.C. and Martins, J.A.C.,‘Models and computational methods for dynamic friction phenomena’ Computer Methods in Applied Mechanics and Engineering 52, 1985, 527–634.
Simo, J.C. and Wong, K.,‘Unconditionally stable algorithms for rigid body dynamics that exactly preserve energy and momentum’ International Journal for Numerical Methods in Engineering 31, 1991, 19–52.
Simo, J.C., Tarnow, N. and Doblare, M.,‘Non-linear dynamics of three-dimensional rods: Exact energy and momentum conserving algorithms’ International Journal of Numerical Methods in Engineering 38, 1995, 1431–1473.
Simo, J.C. and Tarnow, N.,‘A new energy and momentum conserving algorithm for the nonlinear dynamics of shells’ International Journal for Numerical Methods in Engineering 37, 1994, 2527–2549.
Simo, J.C. and Tarnow, N.,‘The discrete energy-momentum method. Conserving algorithms for nonlinear dynamics’ Zeitschrift für Angewandte Mathematik und Physik 43, 1992, 757–792.
Bauchau, O.A., Damilano, G. and Theron, N.J.,‘Numerical integration of nonlinear elastic multi-body systems’ International Journal for Numerical Methods in Engineering 38, 1995, 2727–2751.
Bauchau, O.A. and Theron, N.J.,‘Energy decaying scheme for non-linear beam models’ Computer Methods in Applied Mechanics and Engineering 134, 1996, 37–56.
Bauchau, O.A. and Theron, N.J.,‘Energy decaying schemes for nonlinear elastic multi-body systems’ Computers & Structures 59, 1996, 317–331.
Bottasso, C.L. and Borri, M.,‘Energy preserving/decaying schemes for non-linear beam dynamics using the helicoidal approximation’ Computer Methods in Applied Mechanics and Engineering 143, 1997, 393–415.
Bottasso, C.L. and Borri, M.,‘Integrating finite rotations’ Computer Methods in Applied Mechanics and Engineering 164, 1998, 307–331.
Bauchau, O.A. and Joo, T.,‘Computational schemes for nonlinear elasto-dynamics’ International Journal for Numerical Methods in Engineering 45, 1999, 693–719.
Bauchau, O.A.,‘Computational schemes for flexible, nonlinear multi-body systems’ Multibody System Dynamics 2, 1998, 169–225.
Bottasso, C.L., Borri, M. and Trainelli, L.,‘Integration of elastic multibody systems by invariant conserving/dissipating algorithms. Part I: Formulation & Part II: Numerical schemes and applications, Computer Methods in Applied Mechanics and Engineering, 2000, in press.
Bauchau, O.A. and Bottasso, C.L.,‘On the design of energy preserving and decaying schemes for flexible, nonlinear multi-body systems’ Computer Methods in Applied Mechanics and Engineering 169, 1999, 61–79.
Timoshenko, S.P. and Gere, J.M., Theory of Elastic Stability, McGraw-Hill, New York, 1961.
Lanczos, C., The Variational Principles of Mechanics, Dover Publications, New York, 1970.
Dahl, P.R.,‘Solid friction damping of mechanical vibrations’ AIAA Journal 14, 1976, 1675–1682.
Shigley, J.E. and Mischke, C.R., Mechanical Engineering Design, McGraw-Hill, New York, 1989.
Banerjee, A.K. and Kane, T.R.,‘Modeling and simulation of rotor bearing friction’ Journal of Guidance, Control and Dynamics 17, 1994, 1137–1151.
Cardona, A. and Géradin, M.,‘Kinematic and dynamic analysis of mechanisms with cams’ Computer Methods in Applied Mechanics and Engineering 103, 1993, 115–134.
Mitiguy, P.C. and Banerjee, A.K.,‘Efficient simulation of motions involving Coulomb friction’ Journal of Guidance, Control, and Dynamics 22, 1999, 78–86.
Srnik, J. and Pfeiffer, F.,‘Dynamics of CVT chain drives’ International Journal of Vehicle Design 22, 1999, 54–72.
Brewer, L.C. and Rodgers, H.K.,‘Synthesis of tire equations for use in shimmy and other dynamic studies’ Journal of Aircraft 8, 1971, 689–695.
Bauchau, O.A.,‘On the modeling of friction and rolling in flexible multi-body systems’ Multibody System Dynamics 3, 1999, 209–239.
Baumeister, T., Avallone, E.A. and Baumeister III, T. (eds), Marks’ Mechanical Engineers Handbook, McGraw-Hill, New York, 1978.
Kane, T.R. and Levinson, D.A., Dynamics: Theory and Applications, McGraw-Hill, New York, 1985.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Bauchau, O.A., Rodriguez, J. Simulation of Wheels in Nonlinear, Flexible Multibody Systems. Multibody System Dynamics 7, 407–438 (2002). https://doi.org/10.1023/A:1015558329829
Issue Date:
DOI: https://doi.org/10.1023/A:1015558329829