
Abstract
Interplanetary transport of payloads of unprecedented mass, as envisaged beyond the lunar gateway, will require thrusters with high specific impulse as well as high thrust. To achieve this, innovations in propulsion are critical. Many classes of electric thruster utilise a magnetic applied field module to accelerate charged particles. Magnetoplasmadynamic thrusters exhibit improved performance with increasing field, at least up to the limit of around 0.5 T able to be provided by permanent magnets or copper electromagnets. However, superconducting magnets can generate much stronger magnetic fields. In this study, we utilised a space-relevant cryocooled high temperature superconducting magnet as the applied field module for a central cathode electrostatic thruster (CC-EST). A convex anode enabled ignition at high magnetic fields, and in this configuration the thruster’s performance was characterised in the power range of 1 kW to 2.5 kW and at steady applied fields ranging from 0.6 T to 0.8 T, representing a significant advance in achievable field strength. In combination, these operating parameters enabled the achievement of a magnet-inclusive thruster efficiency of 19%, while the cryocooled magnet was demonstrated to be thermally stable in the presence of the kW-scale plasma, demonstrating the viability of such a design for space flight applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Electrostatic ion acceleration devices such as Hall Effect Thrusters (HETs) and Gridded Ion Thrusters (GITs) have been demonstrated in space and allow a wide range of specific impulse (\(I_{sp}\)) values to be achieved [1]. This has enabled many ambitious missions, including Dawn [2] whose electric propulsion system operated for more than 50 000 hours during its multiple orbits of Vesta and Ceres, and the Hayabusa mission [3], in which a spacecraft landed on Itokawa asteroid, mined it for samples, and returned those samples to Earth, prompting the Hayabusa2 successor mission to 162173 Ryugu. However, there are significant mission requirements on the horizon that these thrusters will not address in their current form. Thrust density of these electrostatic thrusters is fundamentally limited [1, 4]— for example, NASA’s NEXT GIT produces 2.3 N m\(^{-2}\) at 7.2 kW (for a thrust of 236 mN, \(I_{sp}\) of 4190 s and system efficiency of 67%) [5], and Busek’s BHT8000 HET produces 9.1 N m\(^{-2}\) at 1.8 kW (for a thrust of 121 mN, \(I_{sp}\) of 1770 s and system efficiency of 58%) [6]. To access higher thruster output power and higher thrust operating points, the surface area of these thrusters must be increased. However, the available surface area roughly scales as spacecraft length squared, whereas necessary thrust force for a fixed acceleration roughly scales with mass, and thus with spacecraft length cubed. Therefore, as spacecraft become heavier HETs and GITs require a greater proportion of the spacecraft outer surface, and beyond a certain spacecraft weight these thrusters become unsuitable. Due to the economic landscape of the space industry, launches are becoming cheaper, spacecraft are becoming larger, and power availability is increasing with spacecraft size. Moreover, developments in deployable structure technology and solar cell performance have increased the power output of solar panel systems [7], and there has recently been renewed interest in nuclear power for spacecraft [8]. Power availability on spacecraft is therefore increasing. A significant aspiration for the electric propulsion community is thus to design a thruster which can bear this power. Specifically, we require a propulsion device with a high thrust density limit which could be throttled in terms of thrust, specific impulse, and output power without requiring a large surface area. One envisioned future for such a high thrust density propulsion device is on an interplanetary cargo ship, utilising a small mass of propellant to slowly move a large payload mass to a distant destination.
Of existing technologies, magnetoplasmadynamic thrusters [9, 10] are best poised to fill this role. These predominantly use electromagnetic acceleration mechanisms to generate thrust in response to a Lorentz force between a cathode-anode discharge current and a magnetic field. There is also some electrothermal acceleration due to electrical heating of the propellant gas. In Self Field Magnetoplasmadynamic Thrusters (SF-MPDTs) the magnetic field is generated by currents in the cathode, anode and plasma, with no supplementary external magnet. SF-MPDTs have been shown to operate at thrust densities of up to 100 kN m\(^{-2}\) [9], and can handle discharge powers of 500 kW and discharge currents of 10 kA for continuous durations exceeding 500 hours [11]. However, high efficiencies are typically only achieved at power levels exceeding 100 kW [9]— a scale which is not accessible with today’s in-space power delivery technology. By adding an external magnet, an Applied Field Magnetoplasmadynamic Thruster (AF-MPDT) is created. In addition to the electrothermal acceleration and self-field acceleration, the applied magnetic field crossed with the discharge current generates a plasma swirl velocity, which is converted to an axial velocity by the diverging magnetic nozzle [10]. AF-MPDTs have been operated at thrust densities of more than 10 kN m\(^{-2}\) for a very high input power of 2.8 MW [4, 12]. However, unlike SF-MPDTs, AF-MPDTs have been demonstrated in a low power regime, with discharge power of 2–11 kW, discharge current of 100–180 A, and efficiency of up to 15% [13]. They are therefore capable of bridging the power gap between existing and future power requirements, but are not as efficient as HETs or GITs in the 1–10 kW range. Coupling the high thrust density of an AF-MPDT during high power operation with the high efficiency of electrostatic thrusters during low power operation provides the motivation for the development of the Central-Cathode Electrostatic Thruster (CC-EST) [14].
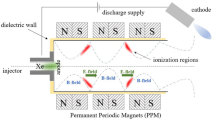
The operating principle of the CC-EST is shown in Fig. 1. This thruster has a similar design to a gas-fed AF-MPDT, but with an insulator block between cathode and anode. The hollow cathode is ignited, and a magnetic field is then applied. Propellant gas is injected at the anode slit, and then a voltage is applied to the anode. The radial electric field crossed with the axial magnetic field creates an azimuthal electron Hall current, which enables effective ionisation of the neutral gas. Once this plasma has been ignited, there can be current flow between cathode and anode. The ions close to the anode are electrostatically accelerated downstream, producing thrust. Unlike an AF-MPDT, when operated in low current mode this thruster utilises electrostatic acceleration in addition to electromagnetic acceleration to generate thrust. CC-ESTs have been demonstrated to produce thrust densities of up to 70 N m\(^{-2}\) [15]. One notable aspect of this CC-EST layout is that, unlike for HETs, strong magnetic fields can be used without inhibiting the mechanism of electrostatic thruster operation. Measuring CC-EST performance at different magnetic fields is consequently a topic of considerable interest. Furthermore, operating the CC-EST at the kW power level (which is achievable on a small satellite) is a target which could have near-term real-world applications, and there are two key scientific questions for the CC-EST in such a regime. Firstly, there are fundamental limits on low power operation in that the thruster will not ignite below a certain discharge voltage. Minimum discharge voltage depends on other operating conditions, such as mass flow rate and applied field [16]. With a rarified plasma in an axial magnetic field, electrons must diffuse across magnetic field lines in order to establish an anode-cathode current. A stronger magnetic field decreases electron diffusivity, whereas a higher mass flow rate increases diffusivity through increased collisionality, and a higher anode voltage increases the electrostatic force on the electrons. Investigating the trade-off between these operational parameters and finding this ignition limits is key to gaining an understanding of the underlying physics. Secondly, previous work on low power AF-MPDT operation has indicated that efficiency increases with magnetic field [17]. It is therefore interesting to investigate whether the CC-EST follows the same pattern. CC-EST performance in the kW range has been characterised at magnetic fields of up to 250 mT [14], with limits on the magnetic field imposed by the copper electromagnet. A high temperature superconducting (HTS) magnet would allow the thruster to be tested at higher magnetic fields. A HTS magnet has not previously been integrated with a CC-EST. However, there have recently been two experimental studies of HTS AF-MPDTs [18, 19]. These both investigated high power, high current AF-MPDT operation, with discharge currents in the 100s of A range. Operating conditions for these thrusters are shown in Table 1, which are shown alongside previous CC-EST and AF-MPDT study data. In addition to experimental campaigns, there have been theoretical and commercial studies on the topic of HTS magnets for plasma thruster applied field modules [20,21,22].

CC-EST operating principle. From central axis outwards, the CC-EST comprises a hollow cathode, ceramic insulator, anode slit for neutral gas injection, anode and magnet. a CC-EST during thruster ignition. The hollow cathode is ignited, then the magnet is energised to generate an axial magnetic field. A neutral gas is injected at the anode slit. A voltage is applied to the anode, creating a radial electric field. The ExB electron Hall current bombards the neutral gas at the anode slit, causing ionisation to occur. b A current is established between cathode and anode, and the resultant plasma is accelerated electrostatically and electromagnetically out of the thruster, forming a plasma plume
A superconducting magnet therefore enables investigation of a CC-EST’s performance in a high field, low power regime. HTS materials can be used to create high field magnets [26], and have long been perceived as futuristic solutions to many challenges in space. Potential uses include magnetic shielding from cosmic rays [27], energy storage and power conditioning [28], and propulsion applications [22]. These materials have zero electrical resistivity at temperatures below their critical temperature. For practical applications, 77 K is often considered a maximum useful operating temperature in a HTS magnet. The HTS material will remain in the superconducting state provided the current in the HTS remains below the critical current. Critical current decreases with increasing magnetic field and increasing temperature.
The use of superconducting wire in an applied field module comes with the penalty of the necessary subsystems. For continuous operation, this includes a power supply and a cryocooler (with its own power supply, control system and thermal management subsystem). Superconducting wire is also expensive and mechanically fragile compared to copper. Its inclusion must therefore be justified by superior performance. There have been several barriers to adopting this technology, such as cost and engineering complexity. There has also been a persisting perception that cryogenic fluids such as liquid nitrogen or supercritical helium are required to provide sufficient cooling to the HTS materials. The two previous examples of HTS plasma thrusters used cryogenic fluid [18, 19] to cool the magnet. This has the advantage of providing a very high cooling power directly to the magnet, but a convective cryogenic fluid cooling system for space applications could have a number of disadvantages (including sloshing, leakage, complexity, and mass) compared to a solid, conductive magnet cooling system.
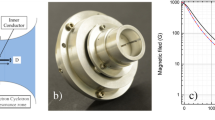
With this in mind, we built a HTS magnet system in which many of the problems involved with space deployment were solved. The operating requirements were limited to the following: required power for the magnet at the level of 1 W to 10s of W, supplied by two power leads; required power for the cryogenic thermal management system of less than 100W, supplied by a further two wires; no cryogenic fluid other than the internal working fluid of a sealed commercial off-the-shelf (COTS) version of a space qualified cryocooler; and sufficient cooling of the cryocooler hot end to maintain a temperature of approx. 10 \(^{\circ }\)C. The magnet had previously been calibrated to obtain magnetic field as a function of current up to 0.8 T, and was operated successfully with magnet currents 37.5% beyond the maximum calibration range to produce a predicted field of 1.1 T. This magnet represents a significant step towards a spaceflight capable HTS magnet.
The HTS magnet was used as the applied field module for a CC-EST. The performance of the thruster was measured in a low power, high magnetic field regime— the first measurements of a CC-EST, or indeed any applied-field plasma thruster, in this regime.
Methods
A plasma thruster was assembled with a superconducting magnet— Fig. 2a— and cryocooler, and suspended on a hanging pendulum thrust stand— Fig. 2b. The thruster’s performance was characterised under a range of different operating conditions, which can be found in Table 1. An operational parameter search was performed to find a set of appropriate operating conditions which would allow reliable plasma thruster ignition at the high magnetic fields which could be created using the HTS magnet.

HTS magnet. a The partially assembled magnet, with 6 of the final 10 double pancake coils, during MLI wrapping. b The fully assembled magnet during integration with the hanging pendulum thrust balance, CC-EST and cryocooler, prior to: completion of the MLI wrap around the cryocooler-magnet interface; instrumentation connection; and shielding of electrical connections from the plasma
HTS CC-EST assembly
The CC-EST and HTS magnet schematic is shown in Fig. 3a. The magnet warm-bore radius is 50mm. Between the outer anode wall and the HTS coils, there was an alumina annulus and bobbin-shaped stainless steel magnet housing. The magnet was vacuum suspended from the stainless steel magnet housing using G10 plates to lengthen the conductive pathway to the magnet, and two layers of MLI (10 sheets per layer) were wrapped around the cryogenic section. Details of the thermal design of the HTS magnet can be found elsewhere [29]. Throughout this paper, the stated magnetic field corresponds to the magnetic field at the location indicated on Fig. 3a.

Diagram of the CC-EST and HTS magnet assembly used in testing. This assembly was mounted on a suspended thrust stand internal to a vacuum chamber. Propellant gas is supplied to the thruster via inlets, whose path is shown in light blue. a The CC-EST was mounted in bore of the HTS magnet. The HTS magnet temperature was maintained by a cryocooler mounted to a copper “thermal bus” which was thermally coupled to the magnet coils. b close-up of “cylinder” thruster configuration. c close-up of “convex” thruster configuration, where an anode ring is used to reduce the effective inner diameter of the anode
The magnet was powered using a CAENels FAST-PS-1K5. The magnet power supply output current \(J_m\) and voltage \(V_m\) were measured. This allowed the power output of the magnet power supply to be calculated. The current leads were thermally anchored to a water cooling system on the thrust stand. This ensured that the temperature of the current leads close to the magnet was held constant at 10 \(^{\circ }\)C, and thus prevented Joule heating from the full length of the current leads conducting into the magnet. The power utilised by the water chiller was not recorded. The magnet was conductively cooled using a cryocooler (Cryotel MT, Sunpower Inc.), and the power output of the cryocooler controller was recorded. The cryocooler cold head was rigidly mounted to a copper thermal bus as shown in Fig. 3a. This thermal bus was anchored to copper sandwich plates between coils and thus provided a thermally conductive cooling path to each of the magnet coils. Figure 3a shows the location of the temperature sensor which was used to monitor the magnet temperature. Note that, with the cryocooler on, the temperature here will be lower than at other locations within the magnet because heat is extracted at the cryocooler cold head. By using conductive cooling, there was no cryogen used in the HTS cooling system, with the exception of the internal working fluid of the 2.1 kg COTS cryocooler.
A closeup of the CC-EST with a cylindrical anode is shown in Fig. 3b. The cathode is a hollow heaterless cathode with a 2 mm diameter keeper orifice. The hollow cathode was operated continuously during the experiments with a mass flow rate (termed the cathode mass flow rate) of 0.5 mg/s Xe. Close to the anode, there is a slit in the insulator through which propellant mass is introduced. The anode mass flow rate varied between 1.3 mg/s and 5.0 mg/s, and was either Xe only or a mixture of Ar+Xe. Figure 3c shows the CC-EST with an additional anode ring, which created a convex anode [30, 31]. Introducing the anode ring of the convex anode has several effects. Firstly, it reduces the effective radius of the anode. This means that charged particles must cross fewer field lines in order to establish a current between cathode and anode, improving the probability of thruster ignition. However, AF-MPDT thrust models [10, 16, 32] predict that thrust scales with anode radius and this means that in high current regimes, including the anode ring may result in a loss of thrust. Secondly, it encourages propellant flow towards the anode, raising the number density of neutral gas in the region close to the cathode. This increases collision frequency, improving electron diffusion and increasing the likelihood of striking a plasma.
Plasma plume analysis
Plasma characterisation is useful for deriving underlying physical phenomena behind thrust generation in electric thrusters. Many intrusive diagnostic tools exist which yield quantitative data, such as Langmuir probes, Faraday cups, and Retarding Potential Analysers. However, these diagnostic tools may perturb the plasma plume to some extent. Optical measurements in the form of plasma plume videos are an alternative plume diagnostic tool which can be set up without any a priori knowledge of the plasma, and without perturbing the plasma itself. Other research groups have used optical measurements to predict plasma parameters such as the electron temperature and number density [33]. Optical measurements are also useful in classifying the plasma plume structure [34]. During our experiments, videos were taken of the thruster during operation. These videos were used to analyse the plume according to the method outlined below, which is demonstrated in Fig. 6.
Video recordings were made with a Sony IMX555 CMOS image sensor which facilitates video recording with a spatial resolution of 1080 px by 1920 px at a recording frequency of 30 Hz. The incoming light is filtered on the chip into a red, green and blue channel. The exact spectral sensitivity function is not known. It is assumed that the blue, green, and red channel capture light in the ranges of 400 nm and 550 nm, 450 nm and 630 nm, 560 nm and 700 - 1000 nm, respectively.
The camera was positioned outside the vacuum chamber viewport, 1.05 m horizontally from the centreline of the thruster. The camera’s normal vector was approximately aligned with the radial direction of the thruster on the plane of the thruster nozzle exit such that it would intersect with the thruster centreline. This allowed the brightest portion of the plume to be captured in a volume of approx. 800 mm x 800 mm x 300 mm, although plasma would be introduced at lower density to all parts of the 2 m diameter, 4 m long vacuum chamber.
In post-processing, the thruster exit along the center line was identified by visual inspection and defined as the origin. The image was tilt-corrected and scaled, and then features of interest were identified and their size and shape were measured.
Thruster performance analysis
The thruster was mounted on a hanging pendulum thrust stand with an arm length of 1 m. A bellows-bearing pivot point allowed the pendulum to oscillate and provided the vacuum seal. The angular position of the thrust stand was measured using an externally mounted Linear Variable Differential Transformer (LVDT) (LVDT1301-2, Shinko Electric Co., Ltd.). The thrust stand’s position as a function of applied force was calibrated using a motor actuated mass-on-string pulley system. Propellant was supplied to the thruster using three Mass Flow Controllers (MFCs) (3660 series, Kofloc, Inc.), with one MFC (maximum volumetric flow rate 200 sccm) supplying the cathode with 5 sccm (0.5 mg/s) of Xenon, and two MFCs (maximum volumetric flow rates of 30 sccm and 100 sccm) supplying the anode slit with Xenon and Argon respectively. These enabled the use of an anode gas mixture of Argon and Xenon, or operation using only Xenon. Xe usage in electrostatic thrusters leads to higher performance compared to Ar due to the greater charge to mass ratio of ions. However, Ar has a lower atomic mass, and therefore a higher number density for the same mass flow rate. By introducing supplementary Ar, a higher number density of propellant can be achieved than with Xe alone. Increased number density results in increased collisionality, which can improve electron diffusion across magnetic field lines. For this reason, it was predicted that supplementary Ar could increase the probability of thruster ignition in extreme cases. Xe mass flow rate was chosen according to an integer number of Ampere-equivalents, whereas in the cases that supplementary Ar was used the maximum controlled output available with the mass flow controller was used.
The tantalum hollow cathode was powered using a Kaufman & Robinson KC8002 keeper controller with a constant discharge current of 2 A. The anode was powered using a DC power supply (HX01000-12M2I, Takasago Ltd.). A NI-DAQ data acquisition system was used to measure the keeper voltage, anode voltage and anode current. Limits on thrust were imposed by the maximum discharge voltage of 400 V (chosen to protect equipment from abnormal discharge), and the maximum mass flow rate of the MFCs of 5.5 mg/s — as such, the measurements are a reflection on the upper limits of the measurement system, not the upper limits of the thruster. However, the lower power limits presented here are intrinsic to the thruster.
The ignition process for the thruster was as follows. The hollow cathode was ignited with no field, and henceforth was running continuously. The magnet was set to the desired field by raising the magnet current, and was held constant both during and between thruster ignition attempts. Mass flow was introduced via the anode slit, and we waited approximately 10 seconds for the background pressure to stabilise. A voltage was then applied to the anode to ignite the thruster. In most cases, ignition would occur simultaneously with the application of the anode voltage and result in a constant anode-cathode current. In some cases, ignition did not occur immediately. If ignition did not occur within the first 15 seconds, the thruster ignition attempt was deemed unsuccessful and the anode voltage was ceased. Furthermore, in some cases the thruster ignited but the discharge current was not constant. In these cases the thruster discharge was considered unstable because the performance output of the thruster was not necessarily repeatable.
It was important to characterise the interaction of the thruster and thrust stand with the magnet and cryocooler. With the magnet on and a discharge current between cathode and anode, there is a measurable Lorentz force interaction with the other equipment in the chamber which was found to account for up to 2.4 mN of the measured thrust. These interactions are dependent on the applied field and the discharge current, and were not measured for every case. For this reason, 2.4 mN was considered as an additional thrust error. In addition, the mechanical interaction between the vibrating cryocooler and the hanging pendulum thrust stand was investigated by firing the thruster with the cryocooler either on or off, and investigating the differences in the LVDT signal to noise in each case. The results of this investigation are shown in the Cryocooler and magnet operation section.
Using these measurements, the performance of the thruster was characterised using the following equations. Specific impulse was estimated from the thrust and the mass flow rate:
where \(I_{sp}\) is specific impulse, \(F_T\) is thrust force, \(\dot{m}\) is propellant mass flow rate (which is inclusive of cathode and anode mass flow rate, unless stated otherwise), g is the gravitational constant. The efficiency of the thruster was calculated using:
where \(\eta\) is efficiency, and P is total power. Equations 1 and 2 can be combined to show the relationship between specific impulse and thrust-to-power ratio:
Total power can be expressed as the sum of contributions:
where \(P_{d}\) is the anode discharge power, \(P_{k}\) is the keeper discharge power, \(P_{m}\) is the power output by the magnet power supply, \(P_{cc}\) is the power output by the cryocooler power supply, V is voltage, J is current, and the subscripts for V and J are the same as those for P. Water cooling was provided to capture the cryocooler’s rejected heat in the vacuum chamber, in lieu of passive radiative cooling that would usually be used in space applications. One of the standout points of this study is that the power utilisation of the cryocooler and magnet system is included in the power and efficiency reporting. This has not been reported in studies using cryogenic fluid cooling loops [18, 19].
Results and discussion
Cryocooler and magnet operation
Figure 4 shows the LVDT voltage (from which thrust can be extracted) as a function of time. Initially, thrust measurements were taken with the cryocooler on. However, cryocooler vibration added noise. To extract a thrust signal, the “cryocooler on” data were smoothed using a moving average with window equal to the period of oscillation of the hanging pendulum thrust stand. The mean of this moving average was compared between thruster on and thruster off, and the voltage difference was converted to a force using a calibration. In cases where the measured force was greater than the calibration weight, extrapolation was used, which was a source of error. For the convex anode, the calibration weight was increased to allow interpolation to be used. With the cryocooler off, LVDT noise was significantly reduced. For this reason, measurements were made with the cryocooler off when possible.

Thrust vs time for example cases with the cryocooler on and off. The cryocooler caused vibration through the thrust stand which impacted the clarity of the LVDT signal
Turning off the cryocooler to gather thrust data had a significant influence on the magnet temperature. The temperature is shown as a function of time in Fig. 5. This temperature is measured at the connection point of the cryocooler cold head to the magnet thermal bus (as shown in Fig. 3a), and therefore this is the position of the magnet which is coldest when the cryocooler is on, and which will have the greatest dT/dt when the operational state of the cryocooler is changed. To take thrust measurements, two different procedures were used, with their influence on magnet temperature shown in Fig. 5. Around the 700 s mark, a measurement is taken by the following procedure. The magnet was at steady state, having had a constant current in the coils for a period of time much greater than the charging time of the magnet. The hollow cathode was running with a mass flow rate of 0.5 mg/s and constant discharge current of 2 A. To initiate the measurement procedure, the cryocooler was turned off, causing the magnet temperature to begin to rise. The gas flow at the anode was initiated concurrently. Once the vacuum chamber back pressure had levelled off and the cryocooler vibrations could no longer be seen in the LVDT voltage, the thruster was ignited by applying a discharge voltage to the anode. Thruster discharge was sustained for 5 to 20 seconds. The discharge was then stopped by setting the discharge voltage to zero, and after a few seconds the anode gas flow was ceased and the cryocooler was turned on again. The process was repeated with the cryocooler on at 950 s. The hollow cathode and magnet remained in the same operational states through the whole procedure, and during the period between thruster discharges. From Fig. 5b, it is clear that turning the cryocooler off and igniting the thruster had a much larger impact on the magnet temperature than igniting the thruster alone.

Superconducting magnet temperature measured at the cryocooler cold head plotted against time for a duration including multiple thruster discharges. a Temperature plots of the superconducting magnet operating at 0.4 T and 0.6 T. Magnet current, \(J_m\), is indicated for each field. Higher magnetic fields result in higher magnet equilibrium temperature. However, discharging the thruster results in more pronounced increases in temperature. b Zoomed-in 0.6T magnet operation. At approx. 700s the cryocooler is switched off, and after several seconds the thruster is ignited. After thruster discharge is ceased, the cryocooler is started once again. A temperature spike is observed. At 950s, the thruster is discharged with the cryocooler on and the temperature spike is much smaller. While the thruster was discharging, there was too much noise on the temperature sensor channel to take a measurement
Figure 5 shows that the temperature of the magnet rises significantly each time the cryocooler is switched off to take a measurement. This means that there is a finite number of measurements that can be taken in quick succession before the magnet will exceed its safe operating temperature. The higher the magnetic field, the higher the magnet current and therefore the larger the heat load on the magnet from heat leak via the copper connection leads (in which Joule heating occurs). The temperature trend is therefore steeper for higher magnetic fields, and so fewer measurements can be taken at high field before the magnet exceeds critical temperature. Furthermore, the higher the magnetic field, the lower the critical current, and therefore the lower the safe operating temperature of the magnet. Thus at high fields, the temperature limit is lower and it is approached faster.
The HTS magnet was operated at a range of different fields, and the power output by the magnet power supply, \(P_m\), was measured. The magnetic field was calculated using a current calibration curve and was not measured directly during thruster experiments. Each double-pancake coil had a voltage tap pair which could be used to measure the voltage drop across the HTS coil. At 28.6 A (producing a predicted on-axis bore field of 1.1 T, but beyond the calibrated range), less than 4 mV per coil was achieved, corresponding to less than 1 W of total heat loss in the 10 HTS double pancakes. However, \(P_m\)=45 W at 1.1 T, demonstrating that the resistive parts of the magnet circuit were the main locations of heating, not the HTS magnet coils. At 0.8 T, \(P_m\)=22 W and at 0.5 T, \(P_m\)=9 W. Therefore, the power lost in the magnet was a fraction of the total power output of the magnet power supply, with most of the power loss occurring in the current leads and electrical connections between the magnet power supply and the magnet rather than in the magnet itself.
Integration of magnet instrumentation with thruster and thrust stand
One of the challenges of integrating the magnet with the thruster and thrust stand was taking precise and accurate measurements of many different physical parameters without the different measurement systems interfering with one another. HTS magnets are high performance devices, provided they are kept within acceptable operating conditions. The magnet coils used in this study were no-insulation coils [35] and are therefore robust to quench to an extent. However, it is still possible to damage a magnet if key locations in the superconducting tape quench, or if quench occurs throughout a large volume of superconductor [36]. It is therefore prudent to continuously monitor the status of the magnet in order to detect indications of imminent quench in the superconducting tape, and to de-energise the magnet before magnet failure occurs.
To monitor the magnet status, numerous sensors (and the wiring to read them) were installed. Each magnet coil “double pancake” set had a corresponding pair of wires for a temperature sensor, and a pair of voltage taps— wires which are soldered to the HTS tape close to the positive and negative electrical terminals, allowing a direct voltage measurement across the HTS coil which can be used to detect signs of HTS quench. There were also many additional temperature sensors mounted to the exterior of the magnet. In total, this required more than 50 magnet sensor wires.
During one thruster discharge, an exposed electrical connector for a temperature sensor was subject to an abnormal discharge from the anode, which resulted in the failure of the temperature monitor. To prevent damage to further equipment, mylar sheets and Kapton tape were used to insulate the instrumentation electrical connections. This added rigidity and mass to the instrumentation wires, altering the response of the thrust stand to an applied force. A change in pendulum spring constant is acceptable, but non-restorative forces such as friction reduce the accuracy of thrust measurements. Friction could occur between: rubbing wires; a wire and Mylar insulation; wires and the apparatus on the thrust stand; wires and equipment affixed to the chamber. Identification and elimination of friction sources is critical in order to take accurate and precise thrust measurements.
In the “cylinder” anode configuration, the data presented here were gathered in a configuration with friction between wires, and hence the thrust measurements have larger errorbars than the “convex” anode configuration thrust data which were gathered after friction within the system had been eliminated.
Plasma plume analysis
Figure 6a shows a representative picture of the thruster and the plume under operating conditions. The plume is clearly visible and three distinct regions can be identified: the bright center line from the thruster, the comparatively faint cone surrounding it, and finally a colorful region curving from the bore of the magnet toward the top and bottom of the chamber. The illumination along the center line is overexposed, meaning no characteristic features can be extracted from that region. The same is true for the cone-like structure since it does not exhibit clear distinguishing features. However, the curved portion of the plume can be analyzed to extract a maximum for comparisons between various thruster discharges. The local intensities are integrated along the line-of-sight, so the location of the maximum intensity does not necessarily align with the location of the physical maximum intensity.

Video-still analysis of thruster plume. a HTS CC-EST firing at 0.5 T, 250 V with 5.5 mg/s Xe-Ar mixture. Thruster is axisymmetric, with axial z direction and radial r direction shown. b Contours of image intensity, with scatter plot of maximum intensity. c Maximum intensity scatter plots for thruster firing at 250V and different magnetic fields and mass flow rates, with lines showing modelled magnetic flux for the no-plasma case. The propellant was Xe, with the exception of 0.5 T 5.5 mg/s, which was a Xe-Ar mixture
To extract this characteristic maximum, the picture is scanned line by line for the maximum grey-value in the vertical direction in the curved region of the plume. Due to the low dynamic range, the maximum intensity value occasionally latches onto the same value for an extended range. For this reason, the median of the consecutive maxima along a pixel line is defined as location for the maxima.
Figure 6b shows the light intensity contour plot for the same image, and a representative result for this feature extraction approach. The maximum intensity line shown in black demonstrates that there is significant curvature in the plume.
While further evidence is required to corroborate this hypothesis, we predict that this indicates that there are charged particles which are tied to the magnetic field lines. This would agree with the findings of Han et al. [33], which further showed that the particles tied to the field lines are highly magnetised electrons. Light is produced by the electron interaction with background neutrals. In our case, the applied field is significantly stronger than that of Han et al., and further investigation is required to determine whether the ions remain fully magnetised in the plume, and are responsible for the regions of high light intensity. To make a rudimentary estimate, we can assume an isothermal ion temperature of 1 eV, signly charged ions, and that the ions demagnetise when
where \(r_{Li}\) is the ion Larmor radius. Here, the ion transitions between confined (< 1) and unconfined (> 1) states in the magnetic field [21]. For propellant injected at the anode slit, detachment is predicted to occur approximately 40 mm downstream of the thruster exit for Ar at 0.8 T, 30 mm downstream for Ar at 0.6 T, and further upstream for heavier Xe ions. Based on this rough approximation, there is no immediate concern that these magnetic fields (or considerably higher fields) are too high for demagnetisation to occur. However, more investigation into the properties of the plasma plume is required to gain an accurate understanding of ion temperatures and plasma detachment.
An intensity analysis for different plumes is shown in Fig. 6c. The red and blue lines are overlaid up to r=150 mm, whereas the black line extends 11mm further in the z direction at r=150 mm. The difference in operating conditions between the red and blue lines is the mass flow rate, and therefore changing the mass flow rate does not have a large impact the shape of the plume at values of r less than 150 mm. At greater values of r, the algorithm picks out a feature at a lower z position for the blue (higher mass flow rate) line in the region from approx. r=175 mm. For the red (lower mass flow rate) line, a similar feature is also identified, but not until r=230 mm. Curvature is still observed. Differences between the black line and the red/blue lines are more pronounced through the whole region. The differences show that there is a significant response to the new operating conditions: namely, the increased magnetic field and the addition of supplementary Ar propellant. Having established that increasing the mass flow rate had a minimal impact on the plume shape, we can infer that this difference is caused by changing the magnetic field. An explanation for this behavior is provided by the theory of the magnetic nozzle [37] which proposes that currents in the plasma create a magnetic field which opposes the applied magnetic field, thus acting upon the thruster magnet and transferring force to the thruster.
Thruster performance
Thruster performance is shown in Fig. 7. On the left, Fig. 7a, c and e show the performance of the thruster with the cylindrical anode. This is the same anode configuration used in previous studies [23]. The anode discharge voltage is annotated in e). The thruster was successfully ignited at 0.3 T using Xe as the only propellant, but not at 0.5 T. A mixture of Ar and Xe was used at 0.5 T. Figure 7a shows thrust ranging from 26 mN to 82 mN with the highest thrust at 0.5 T corresponding to a specific impulse of 1540 s. This represents reasonably high performance, but thruster ignition was unreliable: only achieved in approximately half of the attempts. Ignition at 0.6 T with the cylindrical anode was attempted, but no stable discharges were achieved at discharge voltages of up to 400 V. It was therefore concluded that investigation of the thruster’s performance at higher magnetic fields was not possible using the cylindrical anode configuration. The specific impulse is shown in Fig. 7c. Specific impulse at 0.3 T using only Xe was recorded at more than 1600 s. As shown in Fig. 7e, this was achieved at low power. By increasing the field and adding supplementary Ar propellant at the anode, the power requirements increased and the specific impulse decreased. The power requirements increased due to the higher ionisation energy of Ar compared to Xe. At fields of both 0.3 T and 0.5 T, the thruster could operate at a range of powers, specific impulses and thrusts. Having discovered that thruster ignition at higher magnetic fields was not possible with this configuration, the thruster was modified with a convex anode as shown in Fig. 3c.

Performance of the HTS CC-EST in high magnetic field regime, with total mass flow rates shown in the legend. Specific impulse values are inclusive of cathode and anode mass flow rates. Power represents total system power as described in Eq. 4
The convex anode results are shown in Fig. 7b, d and f for magnetic fields of 0.6 T and 0.8 T, and for the discharge voltages shown in f). The convex anode configuration enabled thruster ignition at higher magnetic fields, both with and without Ar propellant in addition to the Xe propellant. For example, at 0.6T the minimum discharge voltage was reduced from 400 V (with the cylindrical anode) to 250 V (with the convex anode). The thrust is shown in Fig. 7b. The discharge voltage required for minimum power ignition increased with magnetic field. When Xe was used as the propellant, the thrust measured at minimum power increased slightly with magnetic field. However, when Ar was used to supplement the flow of Xe the thrust was found to decrease with increasing magnetic field. Figure 7d and f also show decreases in Ar+Xe specific impulse and power with increasing magnetic field— contrary to the trends visible in the Xe only data. Investigation into the underlying cause revealed that the discharge current became unsteady during some Ar+Xe discharges at 0.8 T, with current dropouts causing a reduction in thruster power. This resulted in a loss of thrust and specific impulse. It should be noted that in general, the occurrence of discharge current oscillation does not necessitate a decrease in thruster performance, which may improve if the current oscillations enable sufficient power savings in the lower power operation mode. However, in this specific case the reduction in performance represented by this datapoint reflects the increasingly unsteady thruster discharge at higher magnetic fields. While this phenomenon has been reported in other HTS applied-field plasma thruster studies [18, 19], the discharge currents utilised in our experiments were much lower and the oscillation mechanism is probably different. In the Xe only operation no unsteady discharge current was observed, and the thrust and specific impulse at minimum discharge power increased with increasing magnetic field. The minimum discharge power also increased with increasing magnetic field. However, at a fixed discharge voltage and mass flow rate, the discharge power decreased with increasing magnetic field, indicating an increased resistivity of the plasma at higher magnetic field.
The performance of the thruster with convex anode is shown in Fig. 8, here with a) power, and b) thrust-to-power ratio plotted against specific impulse. a) demonstrates that the power requirements with Ar+Xe are higher. The trend of decreasing power and specific impulse with increasing field in the Ar+Xe case is observed again here— the reasons for this are described in the previous paragraph. Regarding Xe only data, at 0.6T the specific impulse ranged from 1160 s at 250 V to 1470 s at 300 V, with corresponding powers of 1053 W and 1457 W respectively. At 0.8 T and 300 V, a lower power of 1162 W was measured. Figure 8b has lines of efficiency overlaid on the data. At 0.8 T and 350 V, the specific impulse of 1560 s is a gain of 90 s with no reduction in thrust-to-power ratio (25 mN/kW) compared to 0.6 T and 300 V. At a fixed mass flow rate and discharge voltage, increasing the magnetic field leads to a higher thrust-to-power ratio, lower specific impulse and lower power utilisation. At fixed magnetic field and mass flow rate, increasing the voltage increased the specific impulse and reduced the thrust-to-power ratio. The convex anode enhances neutral stagnation, which can lead to improved ionisation efficiency. Using an Ar+Xe gas mixture reduced the baseline performance, and caused it to be reduced further as the magnetic field increased due to discharge instabilities.

Thruster performance for the convex anode configuration, which enabled reliable thruster ignition at magnetic fields of up 0.8 T. a shows power against specific impulse, and b shows thrust-to-power ratio against specific impulse, with electrical efficiency curves plotted in addition to test data. The power reported here is inclusive of the cathode keeper power, magnet power and cryocooler system power. The specific impulse is inclusive of cathode and anode mass flow rates. Anode propellant gas is 2.1 mg/s Xe except where datapoints are in a box labelled Ar+Xe, in which case the anode propellant is 3.0 mg/s Ar + 1.3 mg/s Xe
The error bars on the specific impulse measurements are large in all cases presented here, particularly in the cases with low mass flow rates. The cathode Mass Flow Controller (MFC) was operated at 1.8% of its maximum range, with error taken as 1.0% of its maximum range. By using a MFC with a specification closely matching the experiment requirements, these error bars could be reduced substantially. The thrust errorbars were reduced significantly over the course of the experiments by a) reducing wire friction, and b) switching off the cryocooler when taking measurements, and c) increasing the calibration force range. The thrust error could be further reduced by quantifying the magnetic interaction between the magnet, the vacuum chamber, and the thruster discharge current, and this quantification is recommended for future thrust measurements of propulsive devices with high applied magnetic fields. The error in the power measurements was not considered significant. While many of these issues are common to all thruster performance measurements, some of them are specific to the challenges associated with integrating a HTS magnet with a thruster and thus identifying and finding methods to mitigate these issues are significant outcomes of this study.
To better understand these results, it is important to compare them to theory of electromagnetic and electrostatic thrusters. For the convex anode, there are two datapoints which can be compared to gain insight into the influence of the applied magnetic field: \(\dot{m}_a\) = 2.1 mg/s Xe, \(V_d\) = 300 V, B = 0.6–0.8 T. A comprehensive study into the scaling laws of AF-MPDTs was performed by Lev [17], but the scaling relations for the full range of AF-MPDT powers are a sub-optimal fit to the experimental data in low power regions [16]. A targeted study by Balkenhohl [16] built upon the work of Lev with a view to predicting low current operational parameters for AF-MPDTs. Balkenhohl’s model predictions for this thruster are shown in Table 2. There is a significant discrepancy between the measured results and the modelled results. Firstly, the power predictions are considerably lower. AF-MPDTs typically operate in a high current, low voltage regime and the modelled discharge voltages for 5 A current were approximately 130 V for both magnetic fields— much lower than the 300 V true value. The modelled thrust and specific impulse are both less than half of the measured values. Combining these parameters into an efficiency value shows that the lower power predictions of the model do not account for the lower modelled thrust and specific impulse: the measured efficiency is 16–18% and is much greater than the modelled efficiency of 4%.
This means that this thruster does not perform as would be expected for an AF-MPDT, providing evidence that other acceleration processes are taking place.
Increasing the discharge voltage leads to an increase in specific impulse, as would be expected for an electrostatic thruster. Furthermore, increasing the magnetic field results in a decreased specific impulse. As magnetic field increases, the charged particles become more magnetised, and resistance of the plasma between anode and cathode increases. This means that power decreases for a fixed voltage, and the specific power (discharge power divided by mass flow rate) decreases. Specific impulse is proportional to specific power [31], so increasing the magnetic field decreases the specific impulse. In electrostatic thrusters, thrust is proportional to \(\dot{m}\sqrt{V_d}\) [31]. Across these two datapoints, the measured thrust was within the error bars, and was lower at higher magnetic fields. This is consistent with only electrostatic thrust or a combination of both electrostatic and electromagnetic thrust, but inconsistent with scaling of electromagnetic thrust only [32]. More data are required in order to deduce scaling laws.
Utilising discharge voltages above 300 V may impact thruster longevity, although a discharge voltage of 500 V has previously been successfully utilised with the CC-EST [38]. Discharge voltage of these levels generate high energy ions which could sputter erode material in the thruster cavity. In particular, the ceramic insulator is at risk of erosion because of the ion sheath. The thruster had no anode cooling in these experiments. As a result, the discharge duration was limited and lifetime testing was not feasible. However, with a thermally managed anode, an avenue of further research is to perform lifetime testing to investigate the extent of erosion, and find geometries and magnetic field topologies that will reduce thruster surface erosion.
Based on these results, we concluded that discharge voltages greater than 300 V would be necessary and that it was therefore critical to insulate electrical connections inside the vacuum chamber, in spite of this reducing the ease of thrust measurements. The convex anode configuration enabled higher field ignition. Xenon was superior to a mixture of Argon and Xenon because of increased performance, improved ignitability and better stability during discharge. We have also demonstrated the first conduction cooled HTS applied field magnet for an electric thruster.
There are several reasons that this technology is a promising candidate for future electric propulsion missions. By utilising an electrostatic acceleration mechanism, this thruster bridges an important gap between efficient, relatively low power electrostatic thrusters and high power, high thrust density electromagnetic thrusters. The electrostatic acceleration mode allows the thruster to be operated in the kW range and with \(J_d<\)10 A. If the thruster is driven at higher current values (by increasing the discharge voltage and/or increasing the mass flow rate) the electromagnetic acceleration mechanisms of an AF-MPDT can be employed. The thruster presented in this paper is a research thruster which has been designed for reconfigurability rather than optimised performance. Building off prior research [15, 24, 30] and the results presented here, there is a clear path to improved thruster performance through magnetic field shaping, thruster geometry shaping, and increased applied magnetic field. At 0.1–0.15 T, anode efficiencies for this thruster were in the range of 8–10% [15], whereas the anode efficiency at 0.8 T was as high as 26% [31]. In addition to improving the performance of the thruster, a superconducting magnet has been demonstrated to improve thruster lifetime through reduction of cathode erosion by other researchers [19] due to improved field homogeneity, albeit at different operating conditions (\(J_d\) = 240 A, \(V_d\) = 150 V, \(B<\)0.35 T, \(\dot{m}\)=40mg/s). The size, weight and power (SWaP) requirements of our HTS magnet are small compared to other electromagnets, and the conductively cooled cryogenic magnet system is simpler for space deployment than previously demonstrated, convectively cooled superconducting magnets [18, 19, 39]. For these reasons, the use of an HTS magnet is justified for many types of plasma thruster, and the HTS CC-EST addresses a gap in electric propulsion use cases.
Conclusions and further work
We have successfully demonstrated that a high temperature superconducting magnet can be used as an applied field module for a plasma thruster, with conduction cooling of the superconducting magnet. While the thruster was firing, the magnet and cryocooler system was used to produce a central field of 0.8 T with a power utilisation of \(P_m+P_{cc}=\) 112 W. Despite their proximity to the hot thruster and plasma, the cryogenic magnet and cryocooler system were able to function effectively for long durations: more than one hour at 0.6 T, and more than 10 minutes at 0.8 T with one 20 s thruster discharge every 2 minutes. The most extreme operating conditions demonstrated were operation with the magnet on, cryocooler off and the thruster firing.
The integration of the magnet with the thruster and thrust stand involved many challenges, including abnormal discharges which damaged equipment, friction between wires preventing repeatable thrust stand response, and cryocooler vibration creating noise in thrust measurements. Solving these issues reduced risk to hardware, prevented different measurement systems from interfering with each other, and was a critical step in developing a system operation procedure which enabled precise and accurate thrust measurements to be collected during operation.
The thruster was operated at a wide range of conditions, and through this sparse search we found a set of operating conditions that would allow reliable thruster ignition at high magnetic fields. The recommended practice is to use Xenon as the only ignition gas; use mass flow rates greater than 2 mg/s at the anode; adopt a convex anode configuration; and insulate electrical connections from anode discharge via the plasma (thus allowing greater anode discharge voltages to be utilised). In the convex anode configuration, specific impulse was found to increase with voltage, and decrease with magnetic field. Further measurements are required to deduce the isolated influence of magnetic field on the efficiency of the thruster throughout the global parameter space. However, the thruster discharge (that could be reliably and repeatedly performed) with the highest efficiency measured in this study was achieved at the highest magnetic field and highest voltage. Limits on low-power operation increased with increasing magnetic field, but efficiency increased with increasing field at the minimum discharge conditions.
In this paper, we characterised an integrated CC-EST/HTS magnet system and found reliable high-field operating conditions. This system has potential to bridge the gap between efficient electrostatic thrusters in the 1–10kW range and 100 kW class electromagnetic thrusters, and is a realistic candidate for space deployment in terms of performance and SWaP. These findings are enabling additional studies to perform systematic investigations on the role of the applied magnetic field in influencing the performance of the thruster at a grid of operating points.
Availability of data and materials
Data are available upon reasonable request to the corresponding author.
Code availability
Not applicable.
References
Goebel DM, Katz I (2008) Fundamentals of Electric Propulsion: Ion and Hall Thrusters. Wiley, Pasadena. https://doi.org/10.1002/9780470436448
Brophy J (2012) The Dawn Ion Propulsion System. In: Russell C, Raymond C (eds) The Dawn Mission to Minor Planets 4 Vesta and 1 Ceres. Springer, New York, pp 251–261. https://doi.org/10.1007/978-1-4614-4903-4_11
Hirabayashi M, Tsuda Y (2022) Ion engine system of hayabusa2. In: Hayabusa2 Asteroid Sample Return Mission: Technological Innovation and Advances. Elsevier, Oxford, pp 401–414. https://doi.org/10.1016/C2020-0-01651-8
Simmonds J, Raitses Y, Smolyakov A (2023) A theoretical thrust density limit for Hall thrusters. J Electr Propuls 2(1):art. 12. https://doi.org/10.1007/s44205-023-00048-9
Crofton M, Pollard J, Beiting E, Spektor R, Diamant K, Eapen X, Cohen R, Patterson M (2009) Characterization of the NASA NEXT Thruster. In: 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Art. 4815. American Institute of Aeronautics and Astronautics, Colorado. https://doi.org/10.2514/6.2009-4815
Diamant K, Curtiss T, Spektor R, Beiting E, Hruby V, Pote B, Kolencik J, Paintal S (2015) Performance and Plume Characterization of the BHT-1500 Hall Thruster. In: Proceedings of the 34th International Electric Propulsion Conference. IEPC, Hyogo-Kobe. IEPC-2015-69
Rocketlab USA (2022) Electron rocket launch 26 there and back again— press kit. https://www.rocketlabusa.com/assets/Uploads/There-and-Back-Again-Press-Kit.pdf. Accessed 15 Aug 2023
Polzin KA, Martin AK, Curran FM, Myers RM, Rodriguez MA (2022) Strategy for Developing Technologies for Megawatt-class Nuclear Electric Propulsion Systems. In: Proceedings of the 37th International Electric Propulsion Conference, IEPC, Cambridge. IEPC-2022-155
Choueiri E (1998) Scaling of Thrust in Self-Field Magnetoplasmadynamic Thrusters. J Propuls Power 14(5):744–753. https://doi.org/10.2514/2.5337
Coogan W, Choueiri E (2017) A Critical Review of Thrust Models for Applied-Field Magnetoplasmadynamic Thrusters. In: AIAA Propulsion and Energy 2017 Forum, art. 4723. AIAA, Atlanta. https://doi.org/10.2514/6.2017-4723
Ageyev V, Ostrovsky V, Petrosov V (1993) High Current Stationary Plasma Accelerator of High Power. In: Proceedings of the 23rd International Electric Propulsion Conference. IEPC, Seattle. IEPC-1993-117
Burton RL, Clark KE, Jahn RG (1983) Measured performance of a multimegawatt MPD thruster. J Spacecr Rocket 20(3):299–304. https://doi.org/10.2514/3.25596
Kitaeva A, Tang H, Wang B, Andreussi T (2019) Theoretical and experimental investigation of low-power AF-MPDT performance in the high mass flow rate low discharge current regime. Vacuum 159:324–334. https://doi.org/10.1016/j.vacuum.2018.10.046
Sasoh A, Mizutani K, Iwakawa A (2017) Electrostatic/magnetic ion acceleration through a slowly diverging magnetic nozzle between a ring anode and an on-axis hollow cathode. AIP Adv 7(6). https://doi.org/10.1063/1.4985380
Ichihara D, Nakano R, Nakamura Y, Kinefuchi K, Sasoh A (2021) Electrostatic-magnetic hybrid ion acceleration for high-thrust-density operation. J Appl Phys 130(22):Art. 223303. https://doi.org/10.1063/5.0066083
Balkenhohl J, Glowacki J, Rattenbury N, Cater J (2023) A review of low-power applied-field magnetoplasmadynamic thruster research and the development of an improved performance model. J Electr Propuls 2(1):Art. 1. https://doi.org/10.1007/s44205-022-00036-5
Lev DR, Choueiri EY (2012) Scaling of Efficiency with Applied Magnetic Field in Magnetoplasmadynamic Thrusters. J Propuls Power 28(3):609–616. https://doi.org/10.2514/1.B34194
Voronov AS, Troitskiy AA, Egorov ID, Samoilenkov SV, Vavilov AP (2020) Magnetoplasmadynamic thruster with an applied field based on the second generation high-temperature superconductors. J Phys Conf Ser 1686(1):Art. 012023. https://doi.org/10.1088/1742-6596/1686/1/012023
Zheng J, Liu H, Song Y, Zhou C, Li Y, Li M, Tang H, Wang G, Cong Y, Wang B, Wang Y, Wu P, Qu T, Zhu X, Zhu L, Liu F, Cheng Y, Zhao B (2021) Integrated study on the comprehensive magnetic-field configuration performance in the 150 kW superconducting magnetoplasmadynamic thruster. Sci Rep 11(1):Art. 20706. https://doi.org/10.1038/s41598-021-00308-4
Glowacki J, Badcock RA, Long N (2019) Design analysis of a plasma thruster with superconducting magnets. In: AIAA Propulsion and Energy 2019 Forum, art. 4081. AIAA, Indianapolis. https://doi.org/10.2514/6.2019-4081
Acheson C, Glowacki J, Parashar T, Wimbush SC (2022) Computational Modelling of AF-MPDTs: How does Magnetic Shielding Influence Thrust? In: Proceedings of the 37th International Electric Propulsion Conference. IEPC, Cambridge. IEPC-2022-472
Collier-Wright M, Boegel E, Betancourt MLR, Herdrich G, Behnke A, Massuti Ballester B, Grosse V (2022) High-temperature superconductor-based power and propulsion system architectures as enablers for high power missions. Acta Astronaut 201:198–208. https://doi.org/10.1016/j.actaastro.2022.08.035
Sasoh A, Kasuga H, Nakagawa Y, Matsuba T, Ichihara D, Iwakawa A (2018) Electrostatic-magnetic-hybrid thrust generation in central-cathode electrostatic thruster (cc-est). Acta Astronaut 152:137–145. https://doi.org/10.1016/j.actaastro.2018.07.052
Ichihara D, Uno T, Kataoka H, Jeong J, Iwakawa A, Sasoh A (2017) Ten-Ampere-Level, Applied-Field-Dominant Operation in Magnetoplasmadynamic Thrusters. J Propuls Power 33(2):360–369. https://doi.org/10.2514/1.B36179
Tahara H, Kagaya Y, Yoshikawa T (1997) Performance and acceleration process of quasisteady magnetoplasmadynamic arcjets with applied magnetic fields. J Propuls Power 13(5):651–658. https://doi.org/10.2514/2.5216
Weijers HW, Trociewitz UP, Markiewicz WD, Jiang J, Myers D, Hellstrom EE, Xu A, Jaroszynski J, Noyes P, Viouchkov Y, Larbalestier DC (2010) High Field Magnets With HTS Conductors. IEEE Trans Appl Supercomput 20(3):576–582. https://doi.org/10.1109/TASC.2010.2043080
Calvelli V, Musenich R, Tunesi F, Battiston R (2017) A Novel Configuration for Superconducting Space Radiation Shields. IEEE Trans Appl Supercond 27(4):1–4. https://doi.org/10.1109/TASC.2016.2642638
Bizon N (2019) Hybrid power sources (HPSs) for space applications: Analysis of PEMFC/Battery/SMES HPS under unknown load containing pulses. Renew Sust Energ Rev 105:14–37. https://doi.org/10.1016/j.rser.2019.01.044
Olatunji JR, Strickland NM, Goddard Winchester MR, Kinefuchi K, Ichihara D, Long NJ, Wimbush SC (2021) Modelling of a 1 T High-Temperature Superconducting Applied Field Module for a Magnetoplasmadynamic Thruster. TENCON 2021 - 2021 IEEE Region 10 Conference (TENCON). pp 173–178. https://doi.org/10.1109/TENCON54134.2021.9707308
Nakano R, Ichihara D, Takahara K, Sasoh A (2022) Improvement of near anode ionization effect on electrostatic-magnetic hybrid ion acceleration by anode shape and magnetic distribution. Proceedings of the Space Sciences and Technology Conference, Paper No. JSASS-2022-4592, in Japanese
Kinefuchi K, Wimbush S, Ichihara D, Acheson C, Nakano R, Maeshima D, Takagi R, Mori R, Olatunji J, Goddard-Winchester M, Pollock R, Strickland N, J G, Pavri B (????) Performance evaluation of a plasma thruster using a high temperature superconducting magnet. Transactions of the Japan Society for Aeronautical and Space Sciences [in press] p to be published
Tikhonov V, Semenikhim S, Alexandrov V, Dyakonov G, Popov G (1993) Research of Plasma Acceleration Processes in Self-Field and Applied Magnetic Field Thrusters. In: Proceedings of the 23rd International Electric Propulsion Conference. IEPC, Seattle. IEPC-1993-76
Han X, Zhang Z, Chen Z, Marano M, Tang H, Cao J (2021) High-spatial-resolution image reconstruction-based method for measuring electron temperature and density of the very near field of an applied-field magnetoplasmadynamic thruster. J Phys D Appl Phys 54(13):Art. 135203. https://doi.org/10.1088/1361-6463/abd504
Chen ZY, Wang YB, Ren JX, Wu P, Li M, Tang HB (2019) Numerical investigation of “Detachment cone” in the magnetic nozzle. In: Proceedings of the 36th International Electric Propulsion Conference. IEPC, Vienna. IEPC-2019-324
Hahn S, Park DK, Bascunan J, Iwasa Y (2011) HTS Pancake Coils Without Turn-to-Turn Insulation. IEEE Trans Appl Supercond 21(3):1592–1595. https://doi.org/10.1109/TASC.2010.2093492
Olatunji JR, Weijers HW, Strickland NM, Wimbush SC (2023) Modelling the Quench Behavior of an NI HTS Applied-Field Module for a Magnetoplasmadynamic Thruster Undergoing a 1kW Discharge. IEEE Trans Appl Supercond 33(5):1–6. https://doi.org/10.1109/TASC.2023.3264170
Ahedo E, Merino M (2011) On plasma detachment in propulsive magnetic nozzles. Phys Plasmas 18(5):Art. 053504. https://doi.org/10.1063/1.3589268
Ichihara D, Oka K, Higo A, Nakamura Y, Kinefuchi K, Sasoh A (2021) Thrust Density Enhancement in an Electrostatic-Magnetic Hybrid Thruster. J Propuls Power 37(6):973–976
Connolly DJ, Bishop AR, Seikel GR (1971) Tests of Permanent Magnet and Superconducting Magnet MPD Thrusters. In: Proceedings of the 7th Propulsion Joint Specialist Conference. AIAA, Salt Lake City. pp 183–194
Acknowledgements
The authors gratefully acknowledge the contributions of Ben Parkinson and Konstantinos Boloukakis for their guidance with magnet development and testing. We also thank Alexander Hillstrom, Daniel Custódio, and Alberto de Celis Romero for their assistance with thruster testing. Thanks also to Stefan Baldacchino for his assistance with image rendering. Finally, we would like to thank Prof. Akihiro Sasoh for his invaluable guidance and support.
Funding
This work was funded by the New Zealand Ministry of Business, Innovation & Employment under contract RTVU1916. This work was supported by JSPS KAKENHI Grant Number JP23H00210.
Author information
Authors and Affiliations
Contributions
Conceptualization (magnet): C.A., J.G., J.O., M.G., N.S., S.W. Conceptualization (thruster): D.I., K.K. Conceptualization (experimental campaign): C.A., R.N., D.M., R.T., R.M., J.O., D.I., S.W., K.K. Data curation (magnet): C.A., J.O., M.G., S.W. Data curation (thruster): C.A., R.N., R.M., K.K. Formal analysis (magnet): C.A., J.G., J.O. Formal analysis (thruster): C.A. Formal analysis (plume images): D.S. Investigation: all authors. Methodology: all authors. Project administration: S.W., K.K. Resources: S.W., K.K. Software (magnet): C.A., R.P., J.O. Supervision: J.G., B.P., R.P., S.W., K.K. Validation: C.A., J.O., K.K. Visualization: C.A., J.G., R.N., B.P., D.S., R.M., K.K. Writing— original draft: C.A., J.G., D.S., B.P. Writing— review and editing: all authors.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Acheson, C., Glowacki, J., Nakano, R. et al. Operational demonstration and experimental characterisation of a central cathode electrostatic thruster equipped with a high temperature superconducting magnet. J Electr Propuls 2, 26 (2023). https://doi.org/10.1007/s44205-023-00060-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s44205-023-00060-z