
Abstract
This study investigates unsteady velocity \({U}_{w}=\xi x/t\) for a Williamson nanofluid film flowing over a moving surface. This work can be used to outline the effects of an applied angled magnetic-field on liquid film flow, which occurs in numerous real-world solicitations such as coating industries for wire or sheet, labs, painting, and several others. Analyzing williamson nanoliquid film flow over a stretching sheet is the main aim of this investigation. The leading Navier–Stokes models are reduced to third-order nonlinear ODE through similarity transformations that are then undertaken using the Hermite wavelet method (HWM). Both 2-dimensional and axisymmetric film flow circumstances have been analyzed. The moving surface parameter \(\xi\) is said to have a limited range for which the solution exists. Specifically, \(\xi \le -1/4\) for axisymmetric flow and \(\xi \ge -1/2\) for two-dimensional flow. Before decreasing to the boundary condition, the velocity climbs until it reaches its maximum. By taking into account the stretching (\(\xi >0\)) and shrinking (\(\xi <0\)) wall conditions, streamlines are also examined for axisymmetric and 2-dimensional flow patterns.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The heat and flow transmission inside a liquid thin layer plays a vital for developing and understanding countless industrial processing equipment and heat exchangers. Applications include coating wire and fibre, manufacturing polymers, fluidizing reactors, chilling using evaporation, and food preparation. The manufacturing of paper, polymeric leaves, insulation components, linoleum, roofing shingles, fibre mattes, etc. [1]. Researchers are increasingly focusing on studying the laminar flow of a liquid thin layer across a stretching leaf due to the huge potential of nanofluids to be utilized as practical instruments in many engineering domains. Gregg and Sparrow [2] first looked into the issue of laminar-film condensation on a vertical plate by utilizing the boundary layer flow theory in light of all the applications above. They subsequently broadened to include an analysis of the heat and mass transfer in a liquid film on a rotating disc [3]. As stated by Wang [4], the melting from a horizontally rotating disc was studied by the perturbation approach to solve the nonlinear equations. The influence of cooling and thermal capillarity on a liquid thin sheet above a rotating disc was studied by Dandapat and Ray [5, 6]. After using similarity transformation to translate the unstable Navier–Stokes formulations into nonlinear differential equations (Des), Wang [7] was the first to take note of a liquid thin layer hydrodynamics on a stretching leaf. Other researchers who expanded on Wang’s work included Andersson et al. [8], Dandapat et al. [9,10,11], Usha and Sridharan [12], Andersson and Lio [13, 14], Chen [15, 16], Abbas et al. [17] and Wang [18]. A superlinear stretching/shrinking sheet was passed by an electrically conducting Newtonian fluid, which was investigated by Mahabaleshwar et al. [19]. Soliton formation over a stretching sheet of a viscous fluid flow has been focused by Ayub et al. [20]. Unsteady casson nanoliquid flow over a stretching sheet has been studied by Vanitha et al. [21].
Nanofluids find applications in many industrial areas nowadays. Nanoparticles’ small size and large surface area account for minimal blockage, long-term stability, higher thermal conductivity, and enriched heat transfer properties. These thermal properties of nanofluids account for their major role in many pharmacological mechanisms for diabetic treatments, electronics refrigeration, and so on. Eastman and Choi [22] initiated the study on nanofluids. In this study, they presented the fine particles suspended in the liquid. Buongiorno [23] attempted to explain the thermal conductivity enrichment of those fluids, and a model was developed which pointed to the mechanisms that are responsible for that nature and inferred that Brownian movement and thermophoretic force are those key processes. Mohyud-din et al. [24] explored Heat and mass transfer behaviour of a nanofluid flowing between plates and studied the Brownian and thermophoresis impact on it.
Pseudoplastic-fluids are non Newtonian fluids, and occurrence is seen in various circumstances, such as devising emulsions, polymer sheets expulsion, and many significant industries. Characteristics of non Newtonian fluids are complicated to analyze, and hence, several models are proposed to elucidate those fluids. In 1929 Williamson first proposed a model to investigate the flow of pseudoplastic materials. Aruna Kumari et al. [25] analyzed the Williamson fluid natural convection in a vertical channel with magnetization. The flow of Williamson fluid through a porous path was enquired by Subramanyam et al. [26]. Akbar et al. [27] examined the Williamson nanofluid peristalsis in a channel having unequal wall temperatures. Nadeem et al. [28] explored the Williamson nanofluid flowing in a compliant curvy walled channel. A noticeable work can be found on Williamson nanofluid flow [29,30,31,32].
Wavelets are mathematical operations that are extensively incorporated into digital signal processing for waveform representation and segmentation, chemical reactions, gas dynamics, time–frequency analysis, and other fundamental and computational math domains [33, 34]. Researchers carried out research involving wavelets in the realm of fluid dynamics. By optimizing the wavelet, Bavi [35] studied the behaviour of magnetohydrodynamic flow in a channel with a low porosity wall. The significance of physical phenomenon represented by fractional differential equation has been resolved via Gegenbauer wavelet by Iqbal et al. [36]. Iqbal et al. [37] proposed Picard’s iteration technique and shifted legendre wavelet to solve non linear Gardner equation.
Kumbinarasaiah et al. [38] adopted the Bernoulli wavelet to solve the nonlinear differential equations emerging from the boundary layer flow of a viscous fluid across a stretching plate. The academic community is extremely interested in Hermite wavelets. Umer et al. [39] have solved fractional delay DEs via the Hermite wavelet approach. In their study of first-order integro DEs, Kumbinarasaiah and Mundewadi [40] compared the solutions they came up with to those achieved by other techniques. Employing the Hermite Wavelet method in an inclined channel, coupled non-linear ODEs solved by Vidya Shree et al. [41] and studied entropy generation in the MHD Casson fluid flow model.
The present study uses the Hermite wavelet method to study the unsteady Williamson nanofluid flow over a surface. Here, the Hermite wavelet operational matrix has been used to solve the time-varying stretching velocity. Nonlinear coupled equations arising from the fundamental equation are solved using the Hermite wavelet method. Graphical analysis can be employed to study the impact of all underlying governing parameters. Current research suggests that the wavelet theory can be utilized to investigate fluid problems. The solutions obtained are acceptable in comparison to already available numerical solutions.
2 Mathematical formulation
The Williamson nanofluid flows across an unsteady moving plate moving with a certain velocity \({u}_{w}(x,0,t)\). A fluid film with a fixed thickness of \(h(t)\) moves steadily over a surface. The ambient pressure is assumed to be \({p}_{0}\), the permeable wall of velocity \({v}_{w}(x,0,t)={v}_{w}\) is considered with x-axis to be along the moving surface and y-axis to be perpendicular to the surface as in Fig. 1.

Physical Configuration.
Following are the Navier Stokes equations corresponding to the above problem [42].
corresponding constraints are
For axisymmetric flow \(\epsilon =1\) and for 2-D flow \(\epsilon =0\). The wall is considered to be moving with an unsteady velocity of \({U}_{w}=\frac{\xi }{t}x\) where \(\xi\) is a real value. We employ the following similarity equations to modify the governing equations \((1)\) to \((3)\) [37]:
and
Then the corresponding velocity component becomes \({v}^{*}=-\frac{1}{{x}^{\epsilon }}\frac{\partial \psi }{\partial x}=-(1+\epsilon )\sqrt{\frac{\nu }{t}}g(\eta )\) and \({u}^{*}=\frac{1}{{x}^{\epsilon }}\frac{\partial \psi }{\partial y}=\frac{xg{\prime}(\eta )}{t}\). Pressure field expression is reduced to
The density and effective viscosity of nanofluid is as follows;
the governing equations are reduced to
where, \(N=\frac{1}{(1-\phi {)}^{2.5}\left[1-\phi +\phi \frac{{\rho }_{s}}{{\rho }_{f}}\right]}\) and the boundary conditions become
\(\xi >0\) implies stretching and \(\xi <0\) implies shrinking. Film thickness \(h(t)\) defined as \(h(t)=\beta \sqrt{\nu t}\). Surface vertical velocity \(h{\prime}(t)=\frac{\beta \sqrt{\nu }}{2\sqrt{t}}=-(1+\epsilon )\sqrt{\frac{\nu }{t}}g(\eta )\) provides other boundary condition \(g(\beta )=-\frac{\beta }{2(1+\epsilon )}\). To simplify the calculations we use the transformation \(g(\eta )=\beta F(\frac{\eta }{\beta })=\beta F(\delta )\). Equation \((8)\) transforms to
boundary conditions transform to
3 Method of solution
Equations (10) and (11) are not possible to solve analytically therefore, the numerical scheme is chosen to solve the problem. We have used the Hermite wavelet method to tackle the equations for different flow parameters. The obtained results are discussed and analyzed in successive sections.
3.1 Hermite wavelet preliminary
Hermite wavelet is defined as [35]:
where \(w(\tau )=\sqrt{1-{\tau }^{2}}\) is the weight function and \(m=\mathrm{0,1},\mathrm{2,3},...,(M-1)\). The Hermite polynomials of degree m are denoted by \({\overline{H}}_{m}(\tau )\) with the following recurrence formula \({\overline{H}}_{0}(\tau )=1,{\overline{H}}_{1}(\tau )=2\delta ,{\overline{H}}_{m+2}(\tau )=2\tau {\overline{H}}_{m+1}(\tau )-2(m+1){\overline{H}}_{m}(\tau ),m=\mathrm{0,1},2,...\)
Approximation of Function: Consider a square-integrable function y(\(\tau\)) series expansion in terms of Hermite wavelet basis.
on truncating y(\(\tau\)) is
where \(P\) is \(1\times {2}^{k-1}M\) matrix and \(L(\tau )\) is \({2}^{k-1}M\times 1\) matrix, \({P}^{T}=[{P}_{\mathrm{1,0}},.....,{P}_{1,M-1},{P}_{\mathrm{2,0}},.....,{P}_{2,M-1},....{P}_{{2}^{k-1},M-1}]\) is the Hermite wavelet unknown coefficient matrix and \(L(\tau )=[{\psi }_{\mathrm{1,0}},...,{\psi }_{1,M-1},{\psi }_{\mathrm{2,0}},...,{\psi }_{2,M-1},...,{\psi }_{{2}^{k-1},M-1}]\) is Hermite wavelet basis matrix.
The Hermite wavelet basis is generated at \(M=6\) and \(k=1\).
where \(({L}_{6}(\tau ){)}^{T}=[{\psi }_{\mathrm{1,0}},{\psi }_{\mathrm{1,1}},{\psi }_{\mathrm{1,2}},{\psi }_{\mathrm{1,3}},{\psi }_{\mathrm{1,4}},{\psi }_{\mathrm{1,5}}]\)
3.2 Integral of operational matrix
\({\psi }_{n,m}(\tau )\) Is integrated concerning \(\tau\) and is rewritten as a linear combination of Hermite wavelet basis.
This implies,
where
\({\psi }_{n,m}(\tau )\) is integrated twice concerning \(\tau\) from the lower limit \(0\) to the upper limit \(\tau\) and using Hermite wavelet basis as the linear combination to represent it.
This implies,
where
According to this, we build a higher-order operational integration matrix through repeated integration.
3.3 Solution approach
Assuming that
where \({P}^{T}=[{p}_{1},{p}_{2},{p}_{3},{p}_{4},{p}_{5},{p}_{6}]\), Eq. (15) is integrated concerning \(\delta\) from 0 to \(\delta\)
After integrating Eq. (16) concerning \(\delta\) substitute \({F}_{\delta }(0)=\xi\),
Integrating Eq. (17) concerning \(\delta\) between the limits \(0\) to \(\delta\) and \(F(0)=0\) is utilized.
Substituting \(\delta =1\) in Eq. (18) we get
Now substituting \(F(\delta )\), \({F}_{\delta \delta }(\delta )\) and \({F}_{\delta \delta \delta }(\delta )\) into the non-dimensional nonlinear ODE in (10) which is formulated from fundamental equations. Then apply the collocation points \({\delta }_{i}=\frac{2i-1}{2M},i=\mathrm{1,2},\dots ,M\), which leads to a nonlinear system of equations consisting of \(M\) equations. Then, we considered the Newton–Raphson method to tackle such a system. The obtained coefficient values are substituted in Eqs. (15)-(19) to obtain the required solutions to Eqs. (10) with (11). We need to increase the size of \(M\) to get higher accuracy.
3.4 Numerical implementation
With the help of the Hermite Wavelet method \({F}_{\delta \delta }(\delta ),{F}_{\delta }(\delta )\) and \(F(\delta )\) is investigated numerically for stretchin wall in Axisymmetric flow \((\epsilon =1)\) at N = 6. \(\phi =0.1,\beta =0.8,We=0.2,{k}_{p}=0.5,\xi =3\) are the static parameters. We retrieve the unknown coefficients as
Studies are done on the effects of changing some physical characteristics while leaving others unaltered. The unknown values are substituted in Eqs. (15)–(19) to get \(F(\delta ),{F}_{\delta }(\delta )\) and \({F}_{\delta \delta }(\delta )\)
4 Results and discussion
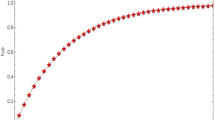
The current study's results are assessed by taking into account the nanofluid, which has water as base fluid and aluminum oxide nanoparticles is immersed in it. Figures 2 and 3 depict the flow over a stretching sheet, whereas Figs. 4 and 5 depict the flow over a shrinking sheet. In Fig. 2B, axial velocity decreases along the perpendicular component. For the value of \(\delta <0.5\) increase in \(\xi\) increases the unsteady velocity \({u}_{w}\) due to which axial velocity increases, but this effect of \(\xi\) on the axial velocity gets reversed for \(\delta >0.5\) where \(\delta =0.5\) is the transition point. The impact of unsteadiness of the fluid doesnot affect the boundary layer due to which increase in unsteady velocity enhances the axial velocity while for the flow away from the boundary layer the effect of unsteadiness in the flow reduces the axial velocity and increases the transverse velocity. In Fig. 2A, transverse velocity increases along \(\delta\) until \(\delta =0.5\) and decreases thereafter. An increase in \(\xi\) increases the transverse velocity. In Fig. 2C, shearing stress increases along \(\delta\) where an increase in \(\xi\) decreases shear stress. The results of the axial symmetric case coincide with the 2-dimensional case, which can be noted in Fig. 3. In Fig. 4A, transverse velocity decreases along \(\delta\) up to \(\delta =0.5\) and increases thereafter further increase in \(\xi\) increases transverse velocity. In Fig. 4B, axial velocity increases along \(\delta\). An increase in \(\xi\) increases axial velocity up to \(\delta =0.5\). For \(\delta >0.5\), an increase in \(\xi\) makes the axial velocity decrease. In Fig. 4C, shearing stress increases along \(\delta\), for the increase in \(\xi\) reduces the shearing stress. The results of the axial symmetric case coincide with the two dimensional case, which can be noted in Fig. 5. It is clear from the figure that the effect of naoparticle volume fraction is significant in axisymmetric case in compared with 2-dimensional case. Table 1 represents the comparison of solutions \({F}_{\delta }(\delta )\) and \(F(\delta )\) with the bvp4c for validation of the results.

\(F\), \({F}_{\delta }\) and \({F}_{\delta \delta }\) plots for deviating \(\xi\) in the axisymmetric case (Stretching wall \(\xi >0\))

\(F\), \({F}_{\delta }\) and \({F}_{\delta \delta }\) plots for deviating \(\xi\) in the two-dimensional case (Stretching wall \(\xi >0\))

\(F\), \({F}_{\delta }\) and \({F}_{\delta \delta }\) plots for deviating \(\xi\) in the two-dimensional case (Shrinking wall \(\xi <0\))

\(F\), \({F}_{\delta }\) and \({F}_{\delta \delta }\) plots for deviating \(\xi\) in the axisymmetric case (Shrinking wall \(\xi <0\))
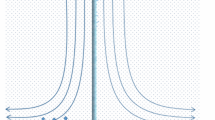
The stream function has been specified as \(\psi =\sqrt{\frac{1}{t}} {x}^{1+\epsilon }f(\frac{y}{\sqrt{t}})\) to perform additional flow pattern analysis. Standard units for physical quantities are used to plot and streamline in the format shown in Figs. 6, 7 and 8. For the sake of discussing the results without losing the ability to generalize, kinematic viscosity is assumed to be a unit. The flow path in the 2-dimensional liquid film with an extended wall (\(\xi >0\)) is shown in Fig. 6A for two different time steps, \(t=2\) and \(t=5\). We observe that fluid has a leftward motion and a zero-velocity streamline that divides the flow zone into two halves. Fluid begins to travel to the right side from the lower section region. In the axisymmetric case, as illustrated in Fig. 6B, we notice that the flow has relocated to the lower region. In this instance, flow patterns resemble those in the two-dimensional instance precisely. At higher \(x\) coordinates, we can see the robust streamlines. Figure 7A and B show streams for a shrinking wall (\(\xi=-0.2\)) at various time steps (\(t=2\) and \(t=5\) for 2D and axisymmetric instances, respectively). The fluid flows uniformly leftward, and the streamlines are arranged in a straight line. With more growth time, the film thickness develops. The flow field for axisymmetric and 2D flow patterns is shown in Fig. 8A and B for various time steps \(t=2\) and \(t=5\), respectively. In this case, the wall is not moving, but the film fluid is moving to the left.

Streamline flowlines of the two-dimensional and axisymmetric stretching (\(\xi =2\)) film with varied time steps \(t=2\) and \(t=5\)

Streamline flowlines of the two-dimensional and axisymmetric shrinking (\(\xi =-0.2\)) film with varied time steps \(t=2\) and \(t=5\)

Streamline flowlines of the two-dimensional and axisymmetric continuous (\(\xi =0\)) film with varied time steps \(t=2\) and \(t=5\)
5 Concluding remarks
In this study, Williamson nano-liquid film flow past an unsteadily moving wall with a surface velocity is investigated using the integral operational matrix by the Hermite wavelet method. The results collected highlight the ability of the Hermite wavelet method to address fluid-related problems observed in the figures. The movement of a Williamson nano liquid film past a dynamic wall with a known surface velocity is investigated. The governing Navier–Stokes expressions are altered into an analogous ODE with preset velocity functions. The Hermite wavelet approach is then used to solve the generated similarity expressions numerically.
The two separate flow directions exhibit a variety of shear stress and velocity characteristics, whereas the velocity displays monotonic divergence with no zero-crossing points. However, several of the limitations show non-monotonic behaviour in the shear stress. According to the flow field, when a wall stretches, fluid goes to the left and has a streamline with zero velocity, dividing the flow zone into two halves. Fluid begins to travel to the right side from the lower section region. We can see that the flow has moved to the lower region in the axisymmetric situation. Streamlines are orientated in the same sequence, and the entire fluid flow is in the left direction for a diminishing wall. To enhance the flow properties needed for numerous engineering applications of liquid film flow, the study can be expanded later to include a wide range of non-Newtonian fluids.
Data availability
The data supporting this study’s findings are available within the article.
Abbreviations
- \(x,y\) :
-
Coordinate axes
- \({p}_{0}\) :
-
Ambient gas pressure (\({\text{Pa}}\))
- \(p\) :
-
Pressure of fluid (\({\text{Pa}}\))
- \(g\) :
-
Gravity acceleration (\({{\text{ms}}}^{-2}\))
- \({U}_{w}\) :
-
Surface moving velocity (\({{\text{ms}}}^{-1}\))
- \(h(t)\) :
-
Fluid film thickness (\({\text{m}}\))
- \(v\) :
-
Velocity of \(y\) direction (\({{\text{ms}}}^{-1}\))
- \(u\) :
-
Velocity of \(x\) direction (\({{\text{ms}}}^{-1}\))
- \(t\) :
-
Time (\({\text{s}}\))
- \(\eta\) :
-
Similarity variable
- \(\epsilon\) :
-
Flow configuration parameter
- \(\rho\) :
-
Density of the Fluid (\({{\text{kgm}}}^{-3}\))
- \(\psi\) :
-
Stream function
- \(\xi\) :
-
Wall moving parameter
- \(\phi\) :
-
Nanoparticle volume fraction
- \(\beta\) :
-
Nondimensional film thickness
- \(\nu\) :
-
Kinematic viscosity (\({{\text{Pas}}}^{-1}\))
References
Sparrow EM, Abraham JP (2005) Universal solutions for the streamwise variation of the temperature of a moving sheet in the presence of a moving fluid. Int J Heat Mass Transf 48(15):3047–3056. https://doi.org/10.1016/J.IJHEATMASSTRANSFER.2005.02.028
Sparrow EM, Gregg JL (1959) A boundary-layer treatment of laminar-film condensation. J Heat Transfer 81(1):13–18. https://doi.org/10.1115/1.4008118
Sparrow EM, Gregg JL (1960) Mass transfer, flow, and heat transfer about a rotating disk. J Heat Transfer 82(4):294–302. https://doi.org/10.1115/1.3679937
Wang CY (1989) Melting from a horizontal rotating disk. Trans ASME J Appl Mech 56:47–50
Dandapat BS, Ray PC (1990) Film cooling on a rotating disk. Int J Non Linear Mech 25(5):569–582. https://doi.org/10.1016/0020-7462(90)90019-6
Dandapat BS, Ray PC (1994) The effect of thermocapillarity on the flow of a thin liquid film on a rotating disc. J Phys D Appl Phys 27(10):2041. https://doi.org/10.1088/0022-3727/27/10/009
Wang CY (1990) Liquid film on an unsteady stretching surface. Q Appl Math 48(4):601–610. https://doi.org/10.1090/QAM/1079908
Andersson HI, Aarseth JB, Dandapat BS (2000) Heat transfer in a liquid film on an unsteady stretching surface. Int J Heat Mass Transf 43(1):69–74. https://doi.org/10.1016/S0017-9310(99)00123-4
Dandapat BS, Santra B, Andersson HI (2003) Thermocapillarity in a liquid film on an unsteady stretching surface. Int J Heat Mass Transf 46(16):3009–3015. https://doi.org/10.1016/S0017-9310(03)00078-4
Dandapat BS, Santra B, Vajravelu K (2007) The effects of variable fluid properties and thermocapillarity on the flow of a thin film on an unsteady stretching sheet. Int J Heat Mass Transf 50(5–6):991–996. https://doi.org/10.1016/J.IJHEATMASSTRANSFER.2006.08.007
Dandapat BS, Maity S, Kitamura A (2008) Liquid film flow due to an unsteady stretching sheet. Int J Non Linear Mech 43(9):880–886. https://doi.org/10.1016/J.IJNONLINMEC.2008.06.003
Usha R, Sridharan R (1995) The axisymmetric motion of a liquid film on an unsteady stretching surface. J Fluids Eng 117(1):81–85. https://doi.org/10.1115/1.2816830
Liu IC, Andersson HI (2008) Heat transfer over a bidirectional stretching sheet with variable thermal conditions. Int J Heat Mass Transf 51(15–16):4018–4024. https://doi.org/10.1016/J.IJHEATMASSTRANSFER.2007.10.041
Liu IC, Andersson HI (2008) Heat transfer in a liquid film on an unsteady stretching sheet. Int J Therm Sci 47(6):766–772. https://doi.org/10.1016/J.IJTHERMALSCI.2007.06.001
Chen CH (2003) Heat transfer in a power-law fluid film over a unsteady stretching sheet. Heat Mass Transfer/Waerme- und Stoffuebertragung 39(8–9):791–796. https://doi.org/10.1007/S00231-002-0363-2/FIGURES/10
Chen CH (2006) Effect of viscous dissipation on heat transfer in a non-Newtonian liquid film over an unsteady stretching sheet. J Nonnewton Fluid Mech 135(2–3):128–135. https://doi.org/10.1016/J.JNNFM.2006.01.009
Abbas Z, Hayat T, Sajid M, Asghar S (2008) Unsteady flow of a second grade fluid film over an unsteady stretching sheet. Math Comput Model 48(3–4):518–526. https://doi.org/10.1016/J.MCM.2007.09.015
Wang C (2006) Analytic solutions for a liquid film on an unsteady stretching surface. Heat Mass Transfer/Waerme- und Stoffuebertragung 42(8):759–766. https://doi.org/10.1007/S00231-005-0027-0/FIGURES/4
Mahabaleshwar US, Nagaraju KR, Sheremet MA, Baleanu D, Lorenzini E (2020) Mass transpiration on Newtonian flow over a porous stretching/shrinking sheet with slip. Chin J Phys 63:130–137. https://doi.org/10.1016/J.CJPH.2019.11.016
Ayub K, Khan MY, Ul-Hassan QM, Ashraf M, Shakeel M (2018) Soliton formations for magnetohydrodynamic viscous flow over a nonlinear stretching sheet. Pramana 91(6):83. https://doi.org/10.1007/s12043-018-1652-8
Vanitha GP, Shobha KC, Mallikarjun BP, Mahabaleshwar US, Bognár G (2023) Casson nanoliquid film flow over an unsteady moving surface with time-varying stretching velocity. Sci Reports 13(1):1–13. https://doi.org/10.1038/s41598-023-30886-4
McGrail BP, Thallapally PK, Blanchard J, Nune SK, Jenks JJ, Dang LX (1995) Enhancing thermal conductivity of fluids with nanoparticles. Nano Energy 2(5):845–855. https://doi.org/10.1016/J.NANOEN.2013.02.007
Buongiorno J (2006) Convective transport in nanofluids. J Heat Transfer 128(3):240–250. https://doi.org/10.1115/1.2150834
Mohyud-din ST, Asad Iqbal M, Shakeel M (2017) A study for steady nanofluid flow between parallel plates. Eng Comput (Swansea) 34(8):2514–2527. https://doi.org/10.1108/EC-04-2017-0142
Aruna KB, Ramakrishna PK, Kavitha K (2012) Fully developed free convective flow of a Williamson fluid in a vertical channel under the effect of a magnetic field. Adv Appl Sci Res 3(4):2492–2499
Subramanyama S, Subba Reddy MV, Jayarami Reddy (2013) Influence of magnetic field on fully developed free convective flow of a Williamson fluid through a porous medium in a vertical channel. J Appl Math Fluid Mech 5(1):33–44
Akbar NS, Nadeem S, Lee C, Khan ZH, Haq RU (2013) Numerical study of Williamson nano fluid flow in an asymmetric channel. Results Phys 3:161–166. https://doi.org/10.1016/J.RINP.2013.08.005
Nadeem S, Maraj EN, Akbar NS (2014) Investigation of peristaltic flow of Williamson nanofluid in a curved channel with compliant walls. Appl Nanosci (Switzerland) 4(5):511–521. https://doi.org/10.1007/S13204-013-0234-9/FIGURES/19
Hamid M, Usman M, Khan ZH, Haq RU, Wang W (2018) Numerical study of unsteady MHD flow of Williamson nanofluid in a permeable channel with heat source/sink and thermal radiation. Eur Phys J Plus 133(12):1–12. https://doi.org/10.1140/EPJP/I2018-12322-5
Ibrahim W, Gamachu D (2019) Nonlinear convection flow of Williamson nanofluid past a radially stretching surface. AIP Adv 9(8):85026. https://doi.org/10.1063/1.5113688/1025457
Nagendra N, Amanulla CH, Reddy MS, Prasad VR (2019) Hydromagnetic flow of heat and mass transfer in a nano williamson fluid past a vertical plate with thermal and momentum slip effects: numerical study. Nonlinear Eng 8(1):127–144. https://doi.org/10.1515/NLENG-2017-0057/ASSET/GRAPHIC/J_NLENG-2017-0057_FIG_012.JPG
Mishra SR, Mathur P (2021) Williamson nanofluid flow through porous medium in the presence of melting heat transfer boundary condition: semi-analytical approach. Multidiscip Model Mater Struct 17(1):19–33. https://doi.org/10.1108/MMMS-12-2019-0225/FULL/XML
Kumar M, Pandit S (2012) Wavelet transform and wavelet based numerical methods: an introduction. Int J Nonlinear Sci 13(3):325–345
Sifuzzaman M, Islam MR, Ali MZ (2009) Application of wavelet transform and its advantages compared to Fourier transform. J Phys Sci 13:121–134
Heydari MH, Bavi O (2022) An optimization method based on the Legendre wavelets for 3D rotating, squeezing and stretching magnetohydrodymanic flow in a channel with porous wall. Eng Comput 38(3):2583–2592. https://doi.org/10.1007/S00366-021-01421-8/FIGURES/7
Asad Iqbal M, Shakeel M, Mohyud-Din ST, Rafiq M (2017) Modified wavelets–based algorithm for nonlinear delay differential equations of fractional order. Adv Mech Eng 9(4):168781401769622. https://doi.org/10.1177/1687814017696223
Iqbal MA, Shakeel M, Ali A, Mohyud-Din ST (2017) Improved wavelets based technique for nonlinear partial differential equations. Opt Quantum Electron 49(4):167. https://doi.org/10.1007/s11082-017-1001-z
Kumbinarasaiah S, Preetham MP (2022) Applications of the Bernoulli wavelet collocation method in the analysis of MHD boundary layer flow of a viscous fluid. J Umm Al-Qura Univ Appl Scie 9(1):1–14. https://doi.org/10.1007/S43994-022-00013-6
Saeed U, ur Rehman M (2014) Hermite wavelet method for fractional delay differential equations. J Differ Equ 2014:1–8. https://doi.org/10.1155/2014/359093
Kumbinarasaiah S, Mundewadi RA (2021) The new operational matrix of integration for the numerical solution of integro-differential equations via Hermite wavelet. SeMA J 78(3):367–384. https://doi.org/10.1007/S40324-020-00237-8/FIGURES/8
Vidya Shree R, PatilMallikarjun B, Kumbinarasaih S (2023) Entropy generation on an MHD Casson fluid flow in an inclined channel with a permeable walls through Hermite wavelet method. Result Control Optimiz 12:100261. https://doi.org/10.1016/J.RICO.2023.100261
Fang T, Wang F, Gao B (2018) Liquid film flow over an unsteady moving surface with a new stretching velocity. Phys Fluids. https://doi.org/10.1063/1.5046479/1015945
Funding
The authors state that no funding is involved.
Author information
Authors and Affiliations
Contributions
All authors have accepted responsibility for the entire content of this manuscript and approved its submission.
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

{kind=link}
{kind=link}
{kind=link}
Cite this article
Vidya Shree, R., Patil Mallikarjun, B. & Kumbinarasaiah, S. Time-varying stretching velocity analysis for an unsteady flow of Williamson fluid by Hermite wavelet. J.Umm Al-Qura Univ. Appll. Sci. 10, 541–554 (2024). https://doi.org/10.1007/s43994-024-00126-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s43994-024-00126-0